二、机器人的基本组成与工作过程 课件(43张幻灯片)
文档属性
| 名称 | 二、机器人的基本组成与工作过程 课件(43张幻灯片) |

|
|
| 格式 | zip | ||
| 文件大小 | 12.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏教版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2019-06-28 00:00:00 | ||
图片预览






文档简介
课件43张PPT。机器人的基本组成与工作过程视频中的机器是不是机器人,为什么?什么是机器人?
大脑(主控部件):具有一定的分析判断控制能力机器人的基本特征:
大脑:自动控制的程序
身体:具有一定的结构形态
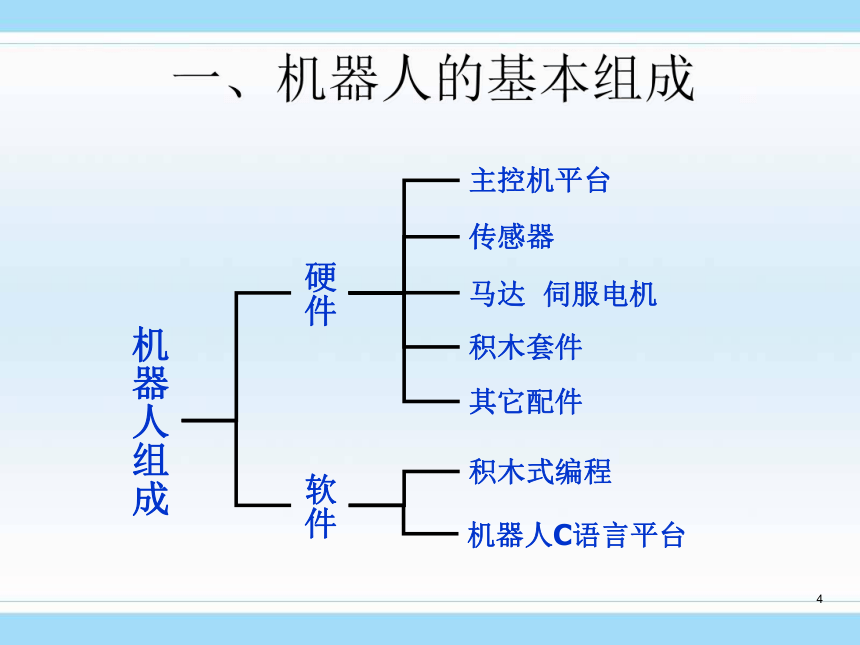
动作:完成一定动作的能力1一、机器人的基本组成机器人组成硬件软件主控机平台积木套件传感器马达 伺服电机积木式编程机器人C语言平台其它配件机器人架构1基础套件核心平台
齿轮箱电机
轮子
通讯线
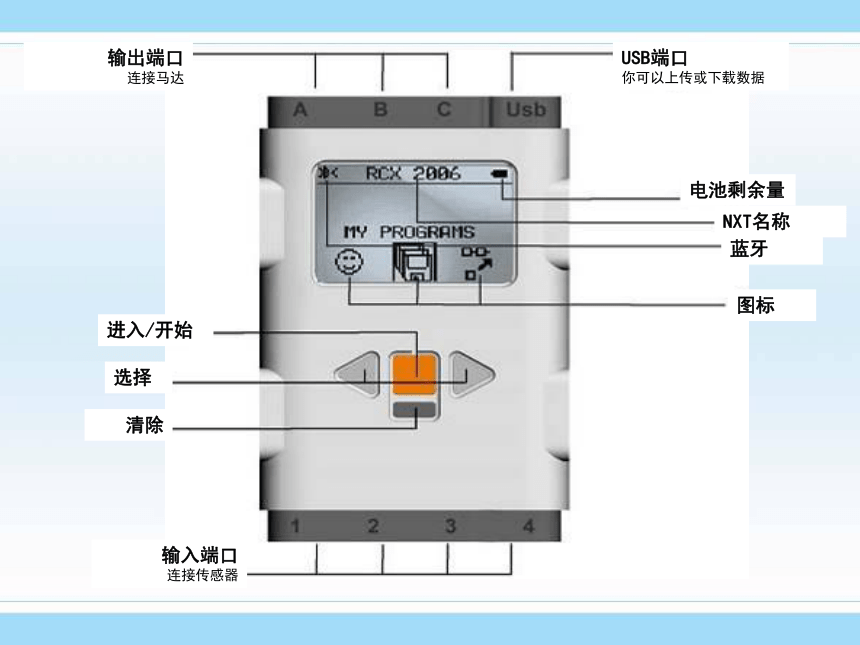
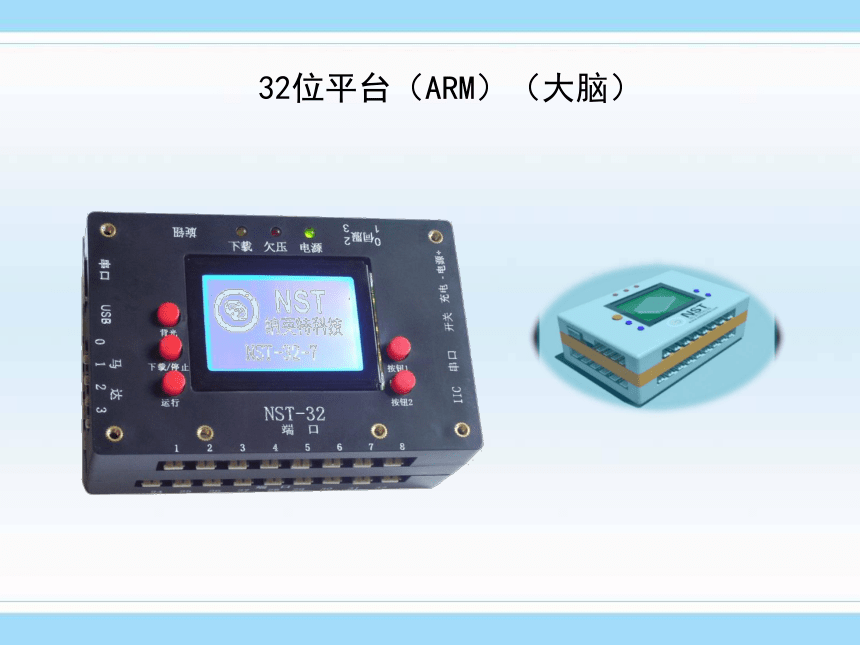
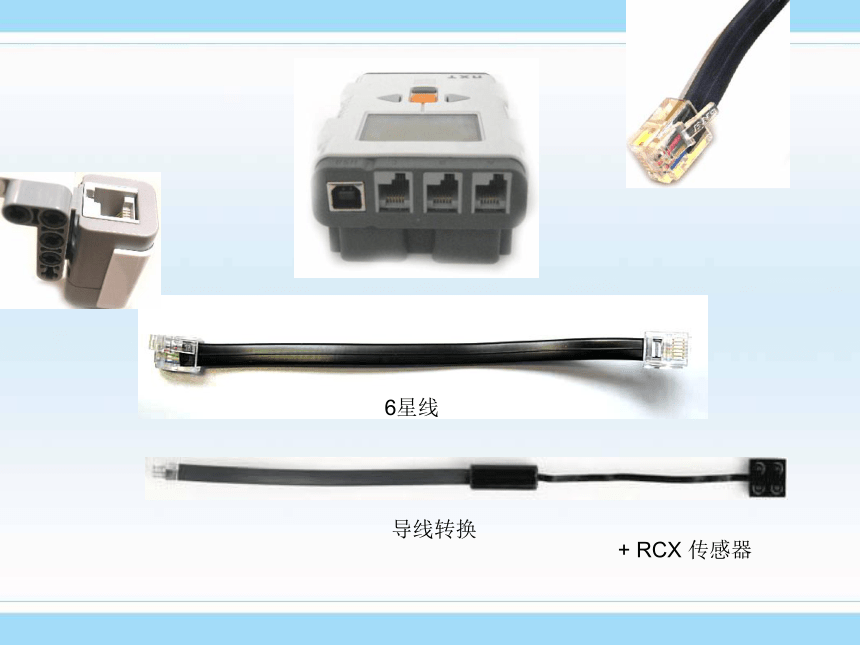
编程平台大脑:机器人控制核心输出端口 连接马达进入/开始选择清除输入端口 连接传感器图标USB端口 你可以上传或下载数据电池剩余量NXT名称蓝牙32位平台(ARM)(大脑)机器人连接线+ RCX 传感器导线转换6星线机器人数据传输 1、数据线传输USB线 连接电脑,可下载程序机器人数据传输 2、蓝牙无线传输机器人的能源—电池
电池类型:
NXT需要6节AA/LR6 电池。
推荐使用碱性电池。
充电电池可以被使用, 但NXT的力量也许会慢慢地被减少, 马达越转越慢。
充电电池:
1400 毫安小时 (最低. 60% 容量6节AA电池)
与现有的AC变压器兼容
充电时间: 最多4个小时。(0到全满)
A/C 插座为直接电源
6节标准AA电池也能够用
认识传感器传感器(一)多自主研发,品种多
人性设计,功率调节及状态指示多种接口,无后顾之忧(I2C、AD等)
独立处理,反映速度快 传感器(二)1.自动门,利用人体的红外微波来开关门 2.烟雾报警器,利用烟敏电阻来测量烟雾浓度,从而达到报警目的 3.手机,数码相机的照相机,利用光学传感器来捕获图象 4.电子称,利用力学传感器(导体应变片技术)来测量物体对应变片的压力,从而达到测量重量目的 5.水位报警,温度报警,湿度报警,光学报警等都是…… 传感器的应用传感器分类传感器分类
模拟传感器
检测:远、近,多、少,高、低
返回值:0~255
数字传感器
检测:有或无,开或关
返回值:0或1
红外传感器 用途:
传感器如右图所示:接收管没有接收到红外光时,主板获得数值为0,当前方有障碍物时,反射的红外光被接收管接收到,主板获得的数值变为1,可用于测是否有障碍物。红外传感器工作原理调节器指示灯 声控传感器 (耳朵)声控传感器能检测一定大小的声音信号,当传感器检测到声音信号后返回数值是1,
如果没检测到声音信号,则返回数值是0,我们可以通过调节器来改变传感器能检测的声音强度,当检测到声音信号后,指示灯会会发出绿色的亮光,我们通过指示灯就能判断传感器有没有检测到声音信号指示灯灰度传感器(眼睛)灰度传感器: 结构原理与红外传感器大体相似。不同之处在于:(1)灰度传感器使用的是可见光。红外传感器使用的是红外线(2)灰度传感器输入主板的数值是0—255,为模拟传感器,红外传感器输入主板的数值是0或1,是数字传感器。
用途:可用来检测颜色深浅程度。颜色越深,主板获得的数值越趋近255,反之越趋近于0。调节器探头灰度传感器(眼睛)光线传感器NXT光传感器触碰传感器声音传感器超声波传感器 感觉距离
识别物体
识别运动与现用的触动传感很象,区别在于十字的孔从环境读取光的强度
读取反射值从红外发光二级管
红外发光管是可以关掉的 测量分贝DB和调整分倍DBA
识别声音
识别音调动力铸造成型
规格多样直接固定与平面
全金属材料轮子认识伺服电机 综合了角度传感器,可以精确地测量速度和距离.
允许马达精确地控制
---当你的机器人移动时,马达速度会一致
---1度的控制精度
乐高技术孔使得搭建模型非常地简单交互式伺服电机上位机 适合不同年龄段用户的软件编译环境。简便的积木式编程和强大的交互式C语言平台的机器人开发环境共同完成对机器人程序的编辑、编译和调试。不但适合中、小学校,同样也适合大学。在线更新
资源共享上位机软件介绍低起点高发展的程序编译环境:有针对初学者的图形化编程环境,完全按照流程图方式生成程序,也有适合高年段交互式C语言的编程环境。
不同语言环境的编译:C、BASIC、LOGO、汇编(开发中);
项目设计理念:加入程序模块说明;
功能:支持多重循环嵌套,多重判断嵌套,支持多条件的生成,实现自定义程序的调用、进程关闭开启。真正支持多进程处理 。
人性设计:在线更新(软件更新、程序下载、消息发布)
反编译:由原程序生成流程图;乐高NXT 软件界面学习NXT 软件入门
工具
栏帮助工作区域编程面版通常面版
完整面版
自定义面版图标设置控制器纳英特3D机器人仿真系统软件一款以.NET平台为基础,使用Microsoft DirectX9.0技术的3D机器人仿真软件,它具有如下特点:
全3D场景;
逼真的仿真效果;
实时运行调试;
自由灵活的机器人、场景搭建;
单人或多人的对抗;
与NSTRobot无缝连接;1二、机器人的工作过程1、给出任务2、机器人搭建3、编写程序4、程序下载与测试模拟登陆火星采集矿石2.根据任务搭建机器人1.给出任务3、编写程序4、程序下载与测试练习1.机器人前进
2.机器人转弯
3.机器人走圆形
4.机器人走正方形探索(走轨迹)
大脑(主控部件):具有一定的分析判断控制能力机器人的基本特征:
大脑:自动控制的程序
身体:具有一定的结构形态
动作:完成一定动作的能力1一、机器人的基本组成机器人组成硬件软件主控机平台积木套件传感器马达 伺服电机积木式编程机器人C语言平台其它配件机器人架构1基础套件核心平台
齿轮箱电机
轮子
通讯线
编程平台大脑:机器人控制核心输出端口 连接马达进入/开始选择清除输入端口 连接传感器图标USB端口 你可以上传或下载数据电池剩余量NXT名称蓝牙32位平台(ARM)(大脑)机器人连接线+ RCX 传感器导线转换6星线机器人数据传输 1、数据线传输USB线 连接电脑,可下载程序机器人数据传输 2、蓝牙无线传输机器人的能源—电池
电池类型:
NXT需要6节AA/LR6 电池。
推荐使用碱性电池。
充电电池可以被使用, 但NXT的力量也许会慢慢地被减少, 马达越转越慢。
充电电池:
1400 毫安小时 (最低. 60% 容量6节AA电池)
与现有的AC变压器兼容
充电时间: 最多4个小时。(0到全满)
A/C 插座为直接电源
6节标准AA电池也能够用
认识传感器传感器(一)多自主研发,品种多
人性设计,功率调节及状态指示多种接口,无后顾之忧(I2C、AD等)
独立处理,反映速度快 传感器(二)1.自动门,利用人体的红外微波来开关门 2.烟雾报警器,利用烟敏电阻来测量烟雾浓度,从而达到报警目的 3.手机,数码相机的照相机,利用光学传感器来捕获图象 4.电子称,利用力学传感器(导体应变片技术)来测量物体对应变片的压力,从而达到测量重量目的 5.水位报警,温度报警,湿度报警,光学报警等都是…… 传感器的应用传感器分类传感器分类
模拟传感器
检测:远、近,多、少,高、低
返回值:0~255
数字传感器
检测:有或无,开或关
返回值:0或1
红外传感器 用途:
传感器如右图所示:接收管没有接收到红外光时,主板获得数值为0,当前方有障碍物时,反射的红外光被接收管接收到,主板获得的数值变为1,可用于测是否有障碍物。红外传感器工作原理调节器指示灯 声控传感器 (耳朵)声控传感器能检测一定大小的声音信号,当传感器检测到声音信号后返回数值是1,
如果没检测到声音信号,则返回数值是0,我们可以通过调节器来改变传感器能检测的声音强度,当检测到声音信号后,指示灯会会发出绿色的亮光,我们通过指示灯就能判断传感器有没有检测到声音信号指示灯灰度传感器(眼睛)灰度传感器: 结构原理与红外传感器大体相似。不同之处在于:(1)灰度传感器使用的是可见光。红外传感器使用的是红外线(2)灰度传感器输入主板的数值是0—255,为模拟传感器,红外传感器输入主板的数值是0或1,是数字传感器。
用途:可用来检测颜色深浅程度。颜色越深,主板获得的数值越趋近255,反之越趋近于0。调节器探头灰度传感器(眼睛)光线传感器NXT光传感器触碰传感器声音传感器超声波传感器 感觉距离
识别物体
识别运动与现用的触动传感很象,区别在于十字的孔从环境读取光的强度
读取反射值从红外发光二级管
红外发光管是可以关掉的 测量分贝DB和调整分倍DBA
识别声音
识别音调动力铸造成型
规格多样直接固定与平面
全金属材料轮子认识伺服电机 综合了角度传感器,可以精确地测量速度和距离.
允许马达精确地控制
---当你的机器人移动时,马达速度会一致
---1度的控制精度
乐高技术孔使得搭建模型非常地简单交互式伺服电机上位机 适合不同年龄段用户的软件编译环境。简便的积木式编程和强大的交互式C语言平台的机器人开发环境共同完成对机器人程序的编辑、编译和调试。不但适合中、小学校,同样也适合大学。在线更新
资源共享上位机软件介绍低起点高发展的程序编译环境:有针对初学者的图形化编程环境,完全按照流程图方式生成程序,也有适合高年段交互式C语言的编程环境。
不同语言环境的编译:C、BASIC、LOGO、汇编(开发中);
项目设计理念:加入程序模块说明;
功能:支持多重循环嵌套,多重判断嵌套,支持多条件的生成,实现自定义程序的调用、进程关闭开启。真正支持多进程处理 。
人性设计:在线更新(软件更新、程序下载、消息发布)
反编译:由原程序生成流程图;乐高NXT 软件界面学习NXT 软件入门
工具
栏帮助工作区域编程面版通常面版
完整面版
自定义面版图标设置控制器纳英特3D机器人仿真系统软件一款以.NET平台为基础,使用Microsoft DirectX9.0技术的3D机器人仿真软件,它具有如下特点:
全3D场景;
逼真的仿真效果;
实时运行调试;
自由灵活的机器人、场景搭建;
单人或多人的对抗;
与NSTRobot无缝连接;1二、机器人的工作过程1、给出任务2、机器人搭建3、编写程序4、程序下载与测试模拟登陆火星采集矿石2.根据任务搭建机器人1.给出任务3、编写程序4、程序下载与测试练习1.机器人前进
2.机器人转弯
3.机器人走圆形
4.机器人走正方形探索(走轨迹)
同课章节目录