一、简易机器人对环境的识别 课件(19张幻灯片)
文档属性
| 名称 | 一、简易机器人对环境的识别 课件(19张幻灯片) |

|
|
| 格式 | zip | ||
| 文件大小 | 4.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏教版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2019-06-28 00:00:00 | ||
图片预览





文档简介
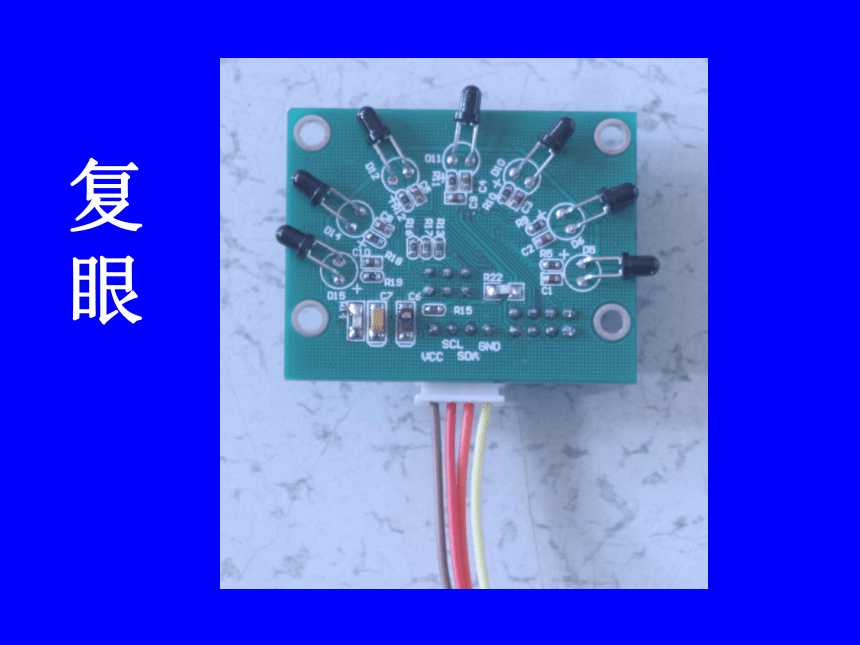
课件19张PPT。 复眼是一种由不定数量的小眼组成的视觉器官,主要在昆虫及甲壳类等节肢动物的身上出现,同样结构的器官亦有在双壳纲身上出现。复
眼
如何固定到车架上一、 硬件连接:连接至控制器数字量(I2C)输入口;注意不能接错(参照控制器硬件说明进行连接) 二、 模块功能:检测环境中光最强、最弱
的方向, 检测复眼各通道测得的光线值及
平均值。通道1通道3通道2通道4通道5通道6通道7三、 函数使用说明:
(一)I2cAdr:0x00~0xff 根据复眼模块的地址跳线获得地址
A2、A1、A0:当接上跳冒时,为 0;拔掉跳冒时,为 1; A2接跳冒 0A1 没接跳冒 1A0 没接跳冒 1A2A1A0:011(B)——>0x03(二)I2cPoint:INPUT_I2C1~ INPUT_I2C4 根据实际接口选择
INPUT_I2C1INPUT_I2C2INPUT_I2C3INPUT_I2C4 (三)command:1~12; 通道1通道3通道2通道4通道5通道6通道7定义变量maxvalue,测试复眼所看到的环境中最亮的亮度值
定义变量maxnumber,测试复眼看到的环境中最亮的方向,并显示到lcd屏幕上机器人找光亮视频,试着画出流程图获取复眼数值(最大值通道号)最大值通道号<4最大值通
道号>4最大值通道号==4机器人左转机器人直走机器人右转找
光
亮
流
程
图1机器人启动
眼
如何固定到车架上一、 硬件连接:连接至控制器数字量(I2C)输入口;注意不能接错(参照控制器硬件说明进行连接) 二、 模块功能:检测环境中光最强、最弱
的方向, 检测复眼各通道测得的光线值及
平均值。通道1通道3通道2通道4通道5通道6通道7三、 函数使用说明:
(一)I2cAdr:0x00~0xff 根据复眼模块的地址跳线获得地址
A2、A1、A0:当接上跳冒时,为 0;拔掉跳冒时,为 1; A2接跳冒 0A1 没接跳冒 1A0 没接跳冒 1A2A1A0:011(B)——>0x03(二)I2cPoint:INPUT_I2C1~ INPUT_I2C4 根据实际接口选择
INPUT_I2C1INPUT_I2C2INPUT_I2C3INPUT_I2C4 (三)command:1~12; 通道1通道3通道2通道4通道5通道6通道7定义变量maxvalue,测试复眼所看到的环境中最亮的亮度值
定义变量maxnumber,测试复眼看到的环境中最亮的方向,并显示到lcd屏幕上机器人找光亮视频,试着画出流程图获取复眼数值(最大值通道号)最大值通道号<4最大值通
道号>4最大值通道号==4机器人左转机器人直走机器人右转找
光
亮
流
程
图1机器人启动
同课章节目录