六年级下册信息技术 3关公巡城 教案 清华大学版
文档属性
| 名称 | 六年级下册信息技术 3关公巡城 教案 清华大学版 |
|
|
| 格式 | zip | ||
| 文件大小 | 1.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-08-13 00:00:00 | ||
图片预览
文档简介
课 题:
三、关公巡城---“多次循环”和“显示”模块
课时
2课时
教学目标:
1、学会使用“控制模块库”中的“多次循环”和“显示”模块和“执行器模块库”中的“显示”模块编写程序,让机器人走正方形并显示信息。
2、了解程序的顺序结构和循环结构
重、难点:
重点:“多次循环”的数据参数
难点:“显示”的数据参数
教学过程
复习:
调用直行和转向的程序并执行它。
导入新课
机器人已经学会了转变。他得知同学们在数学课上画正方形、三角形,真想自己也能走出这样的图形。就让我们帮助他像大将巡场面那样走个正方形,显显威风!
新课:
编正方形
要走出图形,首先要知道图形的特点:正方形的特点是有四条相等的边和四个90°的角。
然后分析机器人走图形的过程:走正方形时,走一条边,转一次角;再走一条边,转一次角……直到走完正方形。
最后用程序来实现这个过程:在程序中,可以用一组“直行”和“转向”模块来完成机器人走一条边,转一次角的动作。只要把“直行”和“转向”模块依次连接起来,就可以得到走正方形的程序。
一起做:
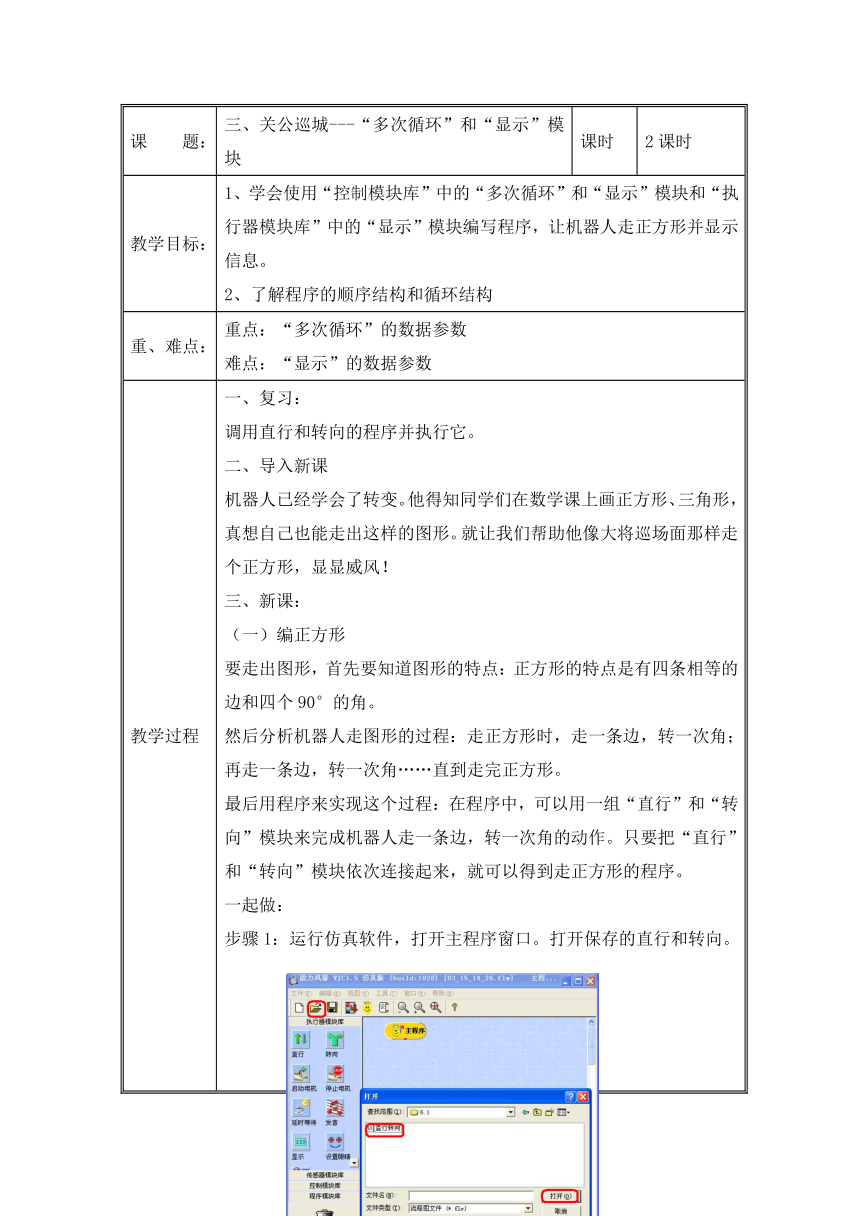
步骤1:运行仿真软件,打开主程序窗口。打开保存的直行和转向。
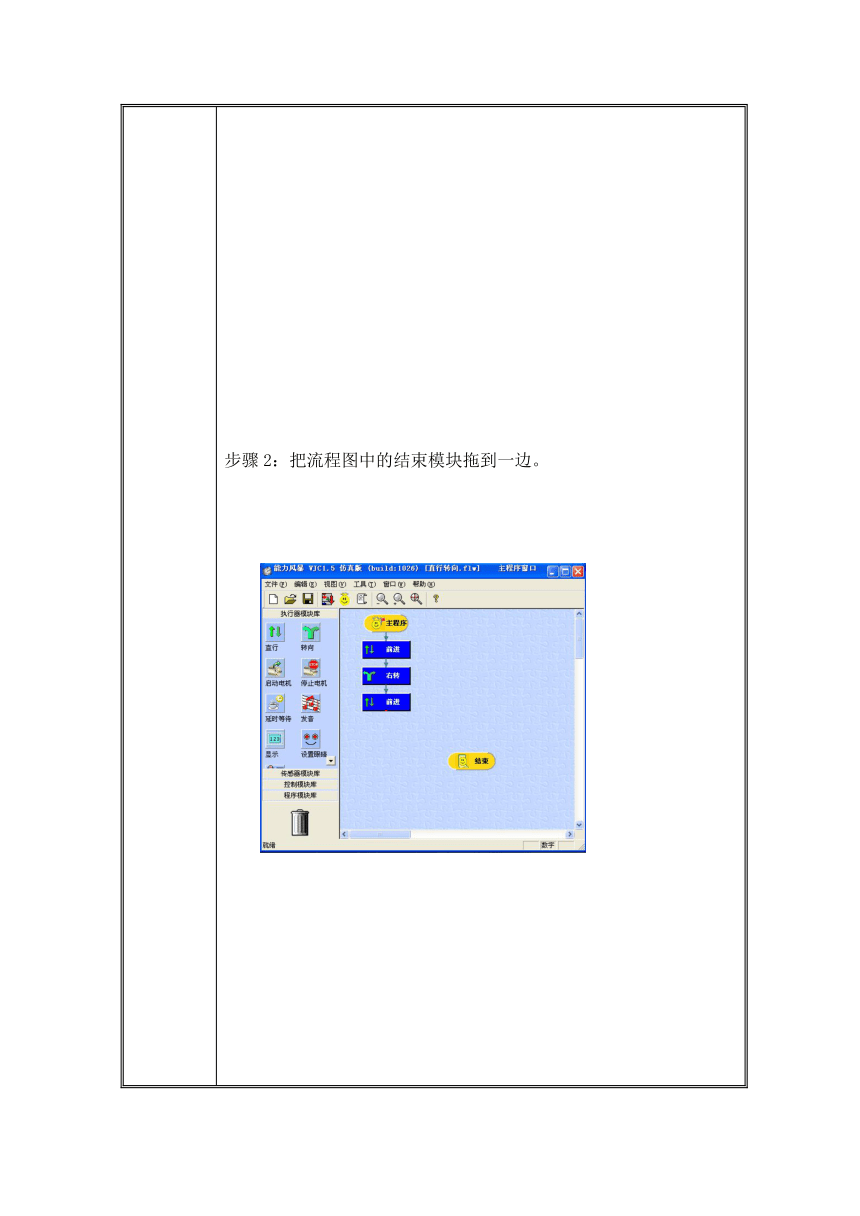
步骤2:把流程图中的结束模块拖到一边。
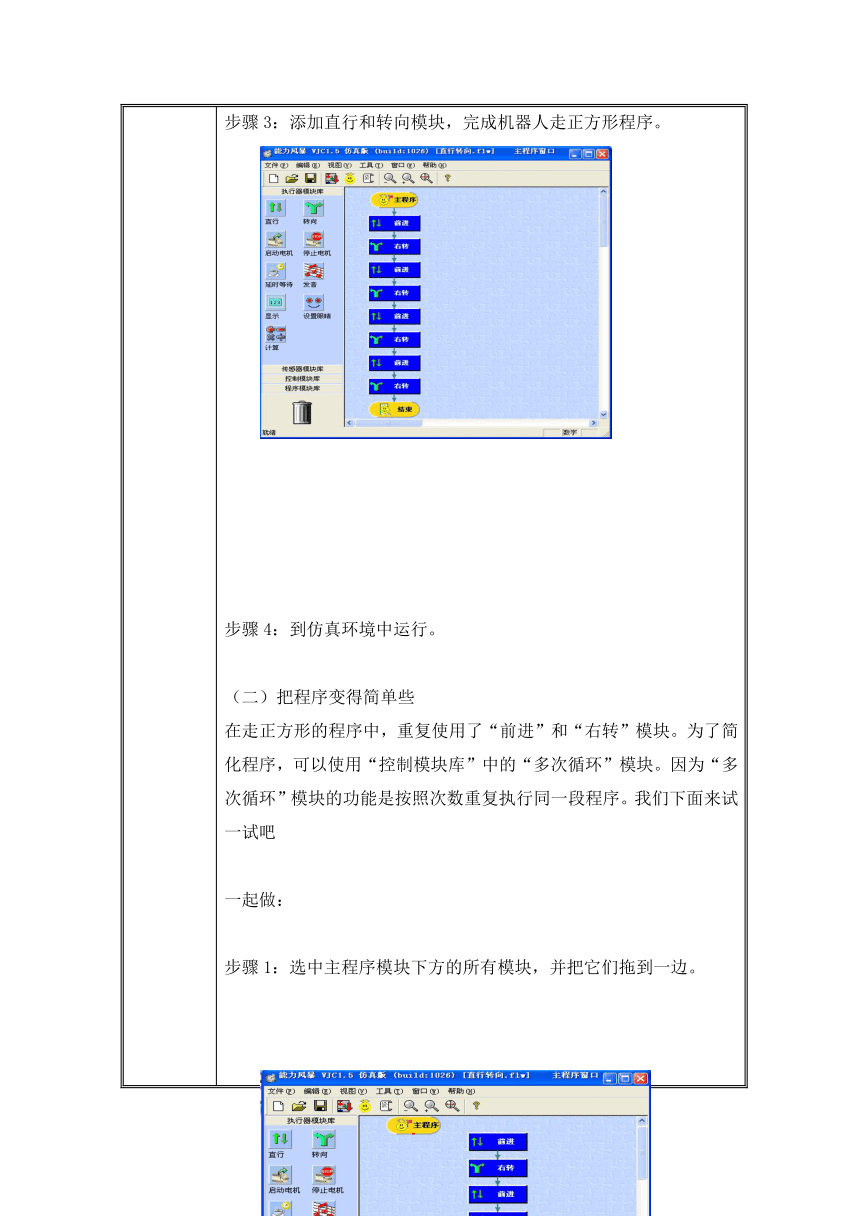
步骤3:添加直行和转向模块,完成机器人走正方形程序。
步骤4:到仿真环境中运行。
(二)把程序变得简单些
在走正方形的程序中,重复使用了“前进”和“右转”模块。为了简化程序,可以使用“控制模块库”中的“多次循环”模块。因为“多次循环”模块的功能是按照次数重复执行同一段程序。我们下面来试一试吧
一起做:
步骤1:选中主程序模块下方的所有模块,并把它们拖到一边。
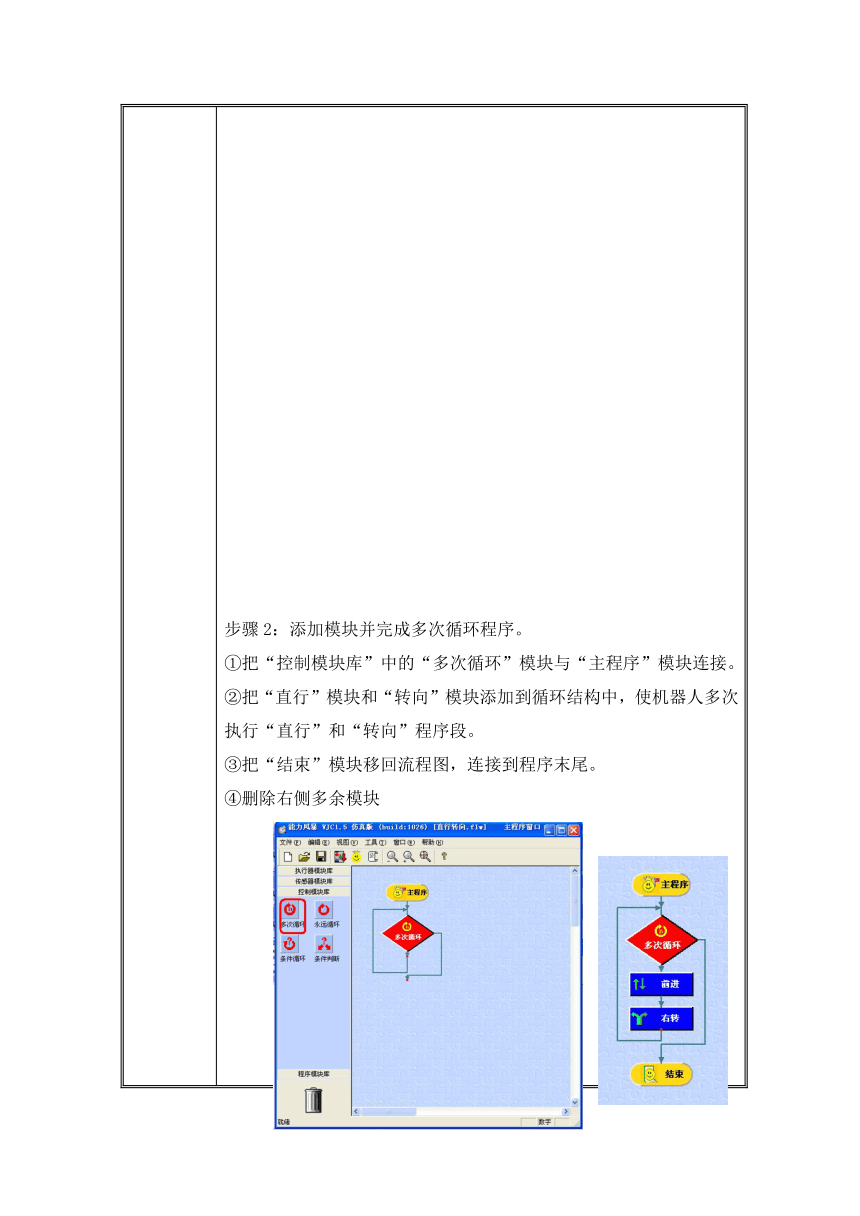
步骤2:添加模块并完成多次循环程序。
①把“控制模块库”中的“多次循环”模块与“主程序”模块连接。
②把“直行”模块和“转向”模块添加到循环结构中,使机器人多次执行“直行”和“转向”程序段。
③把“结束”模块移回流程图,连接到程序末尾。
④删除右侧多余模块
步骤3:程序编写完成后,到仿真环境中运行。
思考:机器人行走的过程和你想象的一致吗?右击“多次循环”模块, 弹出的“多次循环模块”对话框中,看看循环次数是多少?你发现了吗,循环次数和一组“前进”“转向”模块重复执行的次数之间有一定关系。它们是什么关系?
修改机器人走正方形程序的循环次数,到仿真环境中运行并将调试好的程序以“走正方形”为文件名保存。把编写程序时用到的模块名称以及设置的各项参数填写在表中
模块名称
参数值
循环次数
速度
时间/秒
主程序模块
/
/
/
模块
模块
模块
结束模块
/
/
/
程序结构可以分为顺序结构、循环结构和选择结构三种,它们决定了程序的执行过程。走正方形的这两个程序分别采用了顺序结构和循环结构。前一程序在执行时,按照模块的排列顺序依次执行;后一程序在执行时,重复执行“直行”和“转向”模块4次后,结束循环,继续向下执行程序。由“直行”和“转向”模块组成的部分叫做“循环体”,循环次数4是根据程序需要确定的。
在机器人运动会上,有一项机器人折返跑比赛,要求每位选手做3次折返跑,你能帮助机器人完成吗?请参考1—6给出的部分模块及参数把程序编写完整,并到仿真环境中运行。
模块名称
参数值
速度
时间/秒
直行模块
80
1.5
转向模块
100
0.5
(三)显示“文字”
要想实现转向时显示“Thank you!”,只要把“执行器模块库”中的“显示”模块放到循环结构中,再确定显示的内容就可以了。
一起做:
步骤1:打开前面保存的走正方形程序,把显示模块添加到循环结构中
步骤2:输入显示内容
步骤3:程序编写完成后,到仿真环境中运行。
思考:运行程序,观察仿真环境窗口右上角LCD显示屏上显示的信息出现了几次?为什么?再添加上一个“显示”模块,把它连接在“右转”模块下方,右击“显示”模块,在弹出的“显示模块”对话框中的“显示信息”输入框中不输入任何字符信息。运行程序,观察LCD显示的信息有什么变化?
机器人用LCD作为显示屏。LCD能够显示两行英文字母或一些符号和数字,每行最多16个字符,用来显示指定的内容和程序运行过程中的一些信息。它的功能通过设置程序中的“显示”模块来实现。
编写程充,让机器人走正方形,在转向时显示“VERY GOOD!”并把调试好的程序保存起来。
四、练习:
编写程序,让机器人走一个等边三角形,而且在转向时显示一句问候语。把编程时使用的模块名称以及设置的能数真写在表中,然后和大家一起交流。看看别人做的和自己做的有什么不同,它编写的程序有没有你可以借鉴的地方。
模块名称
参数值
循环次数
速度
时间/秒
LCD显示时间
主程序模块
/
/
/
/
模块
模块
模块
模块
模块
结束模块
/
/
/
/
教学回顾:
三、关公巡城---“多次循环”和“显示”模块
课时
2课时
教学目标:
1、学会使用“控制模块库”中的“多次循环”和“显示”模块和“执行器模块库”中的“显示”模块编写程序,让机器人走正方形并显示信息。
2、了解程序的顺序结构和循环结构
重、难点:
重点:“多次循环”的数据参数
难点:“显示”的数据参数
教学过程
复习:
调用直行和转向的程序并执行它。
导入新课
机器人已经学会了转变。他得知同学们在数学课上画正方形、三角形,真想自己也能走出这样的图形。就让我们帮助他像大将巡场面那样走个正方形,显显威风!
新课:
编正方形
要走出图形,首先要知道图形的特点:正方形的特点是有四条相等的边和四个90°的角。
然后分析机器人走图形的过程:走正方形时,走一条边,转一次角;再走一条边,转一次角……直到走完正方形。
最后用程序来实现这个过程:在程序中,可以用一组“直行”和“转向”模块来完成机器人走一条边,转一次角的动作。只要把“直行”和“转向”模块依次连接起来,就可以得到走正方形的程序。
一起做:
步骤1:运行仿真软件,打开主程序窗口。打开保存的直行和转向。
步骤2:把流程图中的结束模块拖到一边。
步骤3:添加直行和转向模块,完成机器人走正方形程序。
步骤4:到仿真环境中运行。
(二)把程序变得简单些
在走正方形的程序中,重复使用了“前进”和“右转”模块。为了简化程序,可以使用“控制模块库”中的“多次循环”模块。因为“多次循环”模块的功能是按照次数重复执行同一段程序。我们下面来试一试吧
一起做:
步骤1:选中主程序模块下方的所有模块,并把它们拖到一边。
步骤2:添加模块并完成多次循环程序。
①把“控制模块库”中的“多次循环”模块与“主程序”模块连接。
②把“直行”模块和“转向”模块添加到循环结构中,使机器人多次执行“直行”和“转向”程序段。
③把“结束”模块移回流程图,连接到程序末尾。
④删除右侧多余模块
步骤3:程序编写完成后,到仿真环境中运行。
思考:机器人行走的过程和你想象的一致吗?右击“多次循环”模块, 弹出的“多次循环模块”对话框中,看看循环次数是多少?你发现了吗,循环次数和一组“前进”“转向”模块重复执行的次数之间有一定关系。它们是什么关系?
修改机器人走正方形程序的循环次数,到仿真环境中运行并将调试好的程序以“走正方形”为文件名保存。把编写程序时用到的模块名称以及设置的各项参数填写在表中
模块名称
参数值
循环次数
速度
时间/秒
主程序模块
/
/
/
模块
模块
模块
结束模块
/
/
/
程序结构可以分为顺序结构、循环结构和选择结构三种,它们决定了程序的执行过程。走正方形的这两个程序分别采用了顺序结构和循环结构。前一程序在执行时,按照模块的排列顺序依次执行;后一程序在执行时,重复执行“直行”和“转向”模块4次后,结束循环,继续向下执行程序。由“直行”和“转向”模块组成的部分叫做“循环体”,循环次数4是根据程序需要确定的。
在机器人运动会上,有一项机器人折返跑比赛,要求每位选手做3次折返跑,你能帮助机器人完成吗?请参考1—6给出的部分模块及参数把程序编写完整,并到仿真环境中运行。
模块名称
参数值
速度
时间/秒
直行模块
80
1.5
转向模块
100
0.5
(三)显示“文字”
要想实现转向时显示“Thank you!”,只要把“执行器模块库”中的“显示”模块放到循环结构中,再确定显示的内容就可以了。
一起做:
步骤1:打开前面保存的走正方形程序,把显示模块添加到循环结构中
步骤2:输入显示内容
步骤3:程序编写完成后,到仿真环境中运行。
思考:运行程序,观察仿真环境窗口右上角LCD显示屏上显示的信息出现了几次?为什么?再添加上一个“显示”模块,把它连接在“右转”模块下方,右击“显示”模块,在弹出的“显示模块”对话框中的“显示信息”输入框中不输入任何字符信息。运行程序,观察LCD显示的信息有什么变化?
机器人用LCD作为显示屏。LCD能够显示两行英文字母或一些符号和数字,每行最多16个字符,用来显示指定的内容和程序运行过程中的一些信息。它的功能通过设置程序中的“显示”模块来实现。
编写程充,让机器人走正方形,在转向时显示“VERY GOOD!”并把调试好的程序保存起来。
四、练习:
编写程序,让机器人走一个等边三角形,而且在转向时显示一句问候语。把编程时使用的模块名称以及设置的能数真写在表中,然后和大家一起交流。看看别人做的和自己做的有什么不同,它编写的程序有没有你可以借鉴的地方。
模块名称
参数值
循环次数
速度
时间/秒
LCD显示时间
主程序模块
/
/
/
/
模块
模块
模块
模块
模块
结束模块
/
/
/
/
教学回顾:
同课章节目录