苏科版 信息技术 九年级上册 2.1 机器人的传感器课件(共42张ppt)
文档属性
| 名称 | 苏科版 信息技术 九年级上册 2.1 机器人的传感器课件(共42张ppt) |

|
|
| 格式 | zip | ||
| 文件大小 | 2.2MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | |||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-08-20 00:00:00 | ||
图片预览








文档简介
课件42张PPT。
机器人的传感器1 概述
2 触觉传感器
3 接近觉传感器
4 视觉传感器
5 听觉、嗅觉、味觉 及其他传感器
6 传感器融合 概 述概 述
机器人技术是一种综合性高技术,它涉及到多种相关技术及学科,如机构学、控制工程、计算机、人工智能、微电子学、传感技术、材料科学以及仿生学等科学技术。因此机器人技术的发展一方面带动了相关技术及学科的发展,另一方面也取决于这些相关技术和学科的发展进程。
机器人传感器可以被定义为一种能把机器人目标物特性(或参量)变换为电量输出的过程。
机器人通过传感器实现类似于人类的知觉作用。机器人传感器主要包括机器人视觉、力觉、触觉、接近觉、距离觉、姿态觉、位置觉等传感器。 概 述 机器人的发展历史第一代机器人是一种进行重复操作的机械、主要是通常所说的机械手,它虽配有电子存储装置,能记忆重复动作,然而因未采用传感器,所以没有适应外界环境变化的能力。
第二代机器人已初步具有感觉相反馈控制的能力,能进行识别、选取相判断.这是由于采用了传感器,使机器人具有了初步的智能。因而传感器的采用与否已成为衡量第—代机器人的重要特征。
第三代机器人为高一级的智能机器人,“电脑化”是这代机器人的重要标志。 概 述 机器人传感器特点.与大量使用的工业检测传感器相比,机器人传感器对传感信息的种类和智能化处理的要求更高。
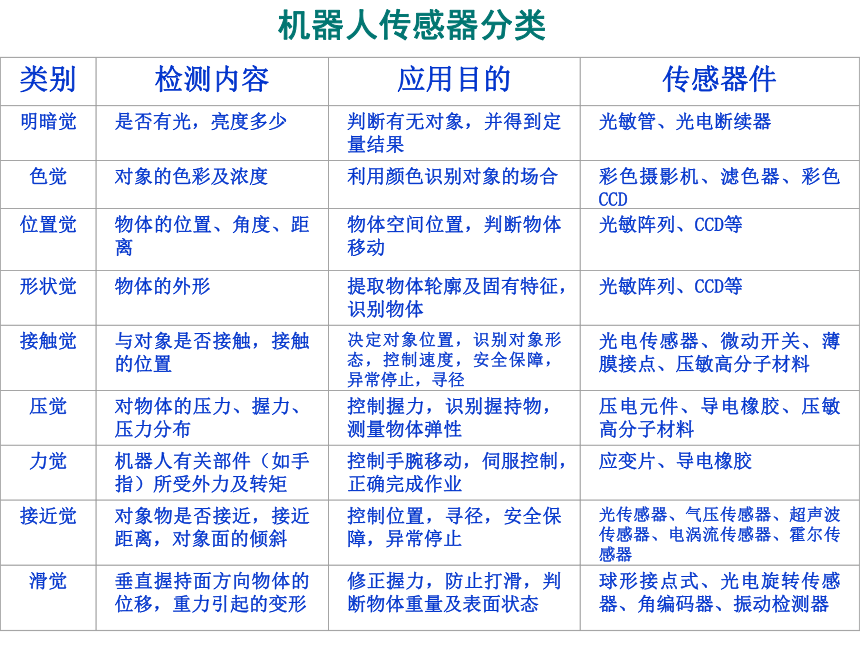
无论研究与产业化,其均需要有多种学科专门技术和先进的工艺装备作为支撑。如果说机器人是人类自身的扩展,那么传感器就是人类五官的延伸。当集成电路、计算机技术取得飞速发展时,人们逐步认识到,作为信息获取装置的传感器没有跟上信息技术的发展,导致“大脑发达、五官不灵”。 概 述 机器人传感器的分类机器人传感器可分为内部检测传感器及外界检测传感器两大类。
内部检测传感器是以机器人本身的坐标轴来确定其位置,是安装在机器人自身中用来感知它自己的状态,以调整并控制机器人的行动。它通常由位置、加速度、速度及压力传感器组成。
外界检测传感器用于机器人对周围环城、日标构的状态持征获取信息.使机器人---环境能发生交互作用,从而使机器人对环境有自校正和自适应能力。外界检测传感器通常包括触觉、接近觉、视觉、听觉、嗅觉、味学觉等传感器。机器人传感器分类 传感器在机器人身上的分布 能踢球的机器人对运动的球类有正确反应的机器人能打网球的机器人机器人足球比赛能行走的机器人服务机器人机器人奏乐机器人伴舞可爱的小机器人能上台阶并避开障碍物的机器人能自己站起来的机器人军事机器人我国引进的排爆机器人进攻型机器人工业机器人核工业机器人汽车喷漆机器人机器人的手机械手在汽车加工中的应用机械手能按照程序焊接和安装汽车部件,是机器人的雏形。激光焊接机械手(参考上海大众汽车有限公司资料)触觉传感器 人的触觉通常包括热觉、冷觉、痛觉、触压觉和力觉等。
机器人触觉是人的触觉的某些模仿。它是有关机器人和对象物
之间直接接触的感觉。通常指以下几种:
触觉: 手指与被测物是否接触.接触图形的检测。
压觉: 垂直于机器人和对象物接触面上的力感觉。
力觉: 机器人动作时各自由度的力感觉。
滑觉: 物体向着垂直于手指把桅面的方向滑动或变形。
触觉传感器 2.1 触觉 触觉是通过与对象物体彼此接触而产生的,所以最好使用手指表面高密度分布触觉传感器阵列,它柔软易于变形,可增大接触面积,并且有一定的强度,便于抓握。接触觉传感器可检测机器人是否接触目标或环境,用于寻找物体或感知碰撞。 结构:平板上安装着多点通、断传感器附
着板的装置
原理:平常为通态,当与物体接触时,弹
簧收缩,上、下板间电流断开。它的功能
相当于一开关,即输出0和1两种信号。
可用于控制机械手的运动方向和范围、
躲避障碍物等。1.导电橡胶;2.金属; 12.衬底; 13.引线触觉传感器 触觉传感器的研究重点: 选择更为合适的敏感材料,研究人工皮肤触觉传感器.现有的材料主要有导电橡胶、压电材料、光纤等;.
将集成电路工艺应用到传感器的设计和制造中,使传感器和处理电路一体化,得到大规模或超大规模阵列式触觉传感器。
触觉传感器的重点集中在阵列式触觉传感器信号的处理上,这种信号的处理涉及到信号处理、图像处理、计算机图形学、人工智能、模式识别等学科,是一门比较复杂、比较困难的技术,还很不成熟,有等于进一步研究和发展.触觉传感器 2.2 压觉压觉指的是对于手指给予被测物的力,或者加在手指上的外力的感觉。它用于握力控制与手的支撑力的检测。
目前的压觉传感器主要是分布是压觉传感器,即通过把分散敏感元件排列成矩阵式格子来设计的。常被用敏感元件阵列单元有:
导电橡胶、感应高分子、应变计、光电器件和霍尔元件.触觉传感器 2.2 压觉这种传感器是在调整器的轴上安装了线性弹簧。一个传感器有l0mm的有效行程。在此范围内,将力的变化转换为长度位移,以便进行俭测。在一侧手指上,每个6mm×8mm的面积分布一个传感器来计算,共排列了28个(四行七排)传感器。左右两侧总共有56个体感器输出。用四路A/D转换器,变速多路调制器对这些输出进行转换后进入计算机。
a为手指抓住物体的状态;b为手指从a状态稍微握紧的状态。触觉传感器 2.3 力觉感知是否夹起了工件或是否夹持在正确部位;
控制装配、打磨、研磨抛光的质量;
装配中提供信息、以产生后续的修正补偿运动来保证装配质量和速度
防止碰撞、卡死和损坏机件。力觉传感器的作用 力觉是指对机器人的指、肢和关节等运动中所受力的感知,主要包括腕力觉、关节力觉和支座力觉等 案例:机器人握力测量案例:玩具机器人(广州中鸣数码 )原理:电机->转角
->电位器
->电阻触觉传感器 2.3 力觉关节力传感器腕力传感器触觉传感器 2.3 力觉 基座力传感器触觉传感器 2.4 滑觉机器人在抓取不知属性的物体时,其自身应能确定最佳握紧力的给定值。
当握紧力不够时,要检测被握紧物体的滑动,利用该检测信号,在不损害物体的前提下,考虑最可靠的夹持方法,实现此功能的传感器称为滑觉传感器。 ??球形滑觉传感器 (举例)传感器如同棋盘一样,相间地用绝缘材料盖住小导电球。
无论滑动方向如何,只要球转动.传感器就会产生脉冲输出。接近觉传感器接近觉传感器接近觉:接近觉是一种粗略的距离感觉,接近觉传感器的主要作用是在接触对象之前获得必要的信息,用来探测在一定距离范围内是否有物体接近、物体的接近距离和对象的表面形状及倾斜等状态,敏感范围可小至几十毫米,甚至1个毫米。在机器人中,主要用于对物体的抓取和躲避。可以认为是介于触觉与视觉之间的感觉。接近觉一般用非接触式测量元件.接近觉传感器有 电磁式
光电式
电容式
气动式
超声波式
红外式等类型
电容式传感器本体由两个极板1,2构成。
极板1由固定频率的正弦波电压激励,2接电荷放大器。0为被接近物。
在传感器两极板与被接近物三者间形成一交变电场。
当0接近1,2时,1,2之间的电场受到了影响,也可以认为0阻断了1、2间连续的电力线。电场的变化引起1、2间电容C12的变化。由于电压幅值恒定,所以电容的变化又反映为极板2上电荷的变化电磁式高频传号is施加于邻近金属一侧的电感线L上;L产生的高频电磁场作用于金属板的表面。由于趋肤效应,高频电磁场不能透过具有一定厚度的金属板,而仅作用于表面薄层内。
而金属板表面感应的涡流严生的电磁场又反作用于线圈L上,改变了电感的大小〔磁场强度的变比也可用另—组检测线圈来检测)。从而感知传感器与被接近物体的距离大小。视觉传感器 每个人都能体会到、眼睛对人来说是多么重要。可以说人类从外界获得的信息,大多数都是从眼睛得到的,研究结果表明,视觉获得的感知信息占人对外界感知信息的80%,是听觉细胞的300多倍.是皮肤感觉细胞的100多倍.从这个角度也可以看出视觉系统的重要性.
视觉传感器是将景物的光信号转换成电信号的器件.2.5 听觉、嗅觉、味觉及其他传感器 除以上介绍的机器人传感器外,还可根据机器人特殊用途安装听觉传感器,嗅觉,味觉传感器及电磁波传感器,而这些机器人主要用于科学研究、海洋资源探测或食品分析、救火等特殊用途。
这些传感器多数属于开发阶段,有待于更进一步完善,以丰富机器人专用功能。 听觉: 具有接近人耳的功能还相差很远;
嗅觉:主要检测空气中的化学成分、浓度、等功能,主要采用气体传感器及射线传感器等。
味觉:对液体进行化学成分的分析。检测味觉方法有pH计、化学分析器等。
其他传感器:如纯工程学的传感器,象磁传感器、安全用传感器和电波传感器等2.6 传感器融合 传感器信息融合又称数据融合,是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。
传感器信息融合技术从多信息的视角进行处理及综合,得到各种信息的内在联系和规律,从而剔除无用的和错误的信息,保留正确的和有用的成分,最终实现信息的优化。它也为智能信息处理技术的研究提供了新的观念。
定义:将经过集成处理的多传感器信息进行合成,形成一种对外部环境或被测对象某一特征的表达方式。概 念2.6 传感器融合机器人系统中使用的传感器种类和数量越来越多,每种传感器都有一定的使用条件和感知范围,并且又能给出环境或对象的部分或整个侧面的信息,为了有效地利用这些传感器信息,需要采用某种形式对传感器信息进行综合、融合处理.
按照人脑的功能和原理进行视觉、听觉、触觉、力觉、知觉、注意、记忆、学习和更高级的认识过程,将空间、时间的信息进行融合,对数据和信息进行自动解释,对环境和态势给予判定。
传感器的融合技术涉及神经网络、知识工程、模糊理论等信息、检测、控制领域的新理论和新方法。 作 用控制和信
息融合计
算机自主移动装配机器人装配机械手力觉传感器触觉传感器视觉传感器超声波传感器激光测距传感器
多传感器信息融合自主移动装配机器人机器人中的传感器信息融合
机器人技术是一种综合性高技术,它涉及到多种相关技术及学科,如机构学、控制工程、计算机、人工智能、微电子学、传感技术、材料科学以及仿生学等科学技术。因此机器人技术的发展一方面带动了相关技术及学科的发展,另一方面也取决于这些相关技术和学科的发展进程。
机器人传感器可以被定义为一种能把机器人目标物特性(或参量)变换为电量输出的过程。
机器人通过传感器实现类似于人类的知觉作用。机器人传感器主要包括机器人视觉、力觉、触觉、接近觉、距离觉、姿态觉、位置觉等传感器。 概 述 机器人的发展历史第一代机器人是一种进行重复操作的机械、主要是通常所说的机械手,它虽配有电子存储装置,能记忆重复动作,然而因未采用传感器,所以没有适应外界环境变化的能力。
第二代机器人已初步具有感觉相反馈控制的能力,能进行识别、选取相判断.这是由于采用了传感器,使机器人具有了初步的智能。因而传感器的采用与否已成为衡量第—代机器人的重要特征。
第三代机器人为高一级的智能机器人,“电脑化”是这代机器人的重要标志。 概 述 机器人传感器特点.与大量使用的工业检测传感器相比,机器人传感器对传感信息的种类和智能化处理的要求更高。
无论研究与产业化,其均需要有多种学科专门技术和先进的工艺装备作为支撑。如果说机器人是人类自身的扩展,那么传感器就是人类五官的延伸。当集成电路、计算机技术取得飞速发展时,人们逐步认识到,作为信息获取装置的传感器没有跟上信息技术的发展,导致“大脑发达、五官不灵”。 概 述 机器人传感器的分类机器人传感器可分为内部检测传感器及外界检测传感器两大类。
内部检测传感器是以机器人本身的坐标轴来确定其位置,是安装在机器人自身中用来感知它自己的状态,以调整并控制机器人的行动。它通常由位置、加速度、速度及压力传感器组成。
外界检测传感器用于机器人对周围环城、日标构的状态持征获取信息.使机器人---环境能发生交互作用,从而使机器人对环境有自校正和自适应能力。外界检测传感器通常包括触觉、接近觉、视觉、听觉、嗅觉、味学觉等传感器。机器人传感器分类 传感器在机器人身上的分布 能踢球的机器人对运动的球类有正确反应的机器人能打网球的机器人机器人足球比赛能行走的机器人服务机器人机器人奏乐机器人伴舞可爱的小机器人能上台阶并避开障碍物的机器人能自己站起来的机器人军事机器人我国引进的排爆机器人进攻型机器人工业机器人核工业机器人汽车喷漆机器人机器人的手机械手在汽车加工中的应用机械手能按照程序焊接和安装汽车部件,是机器人的雏形。激光焊接机械手(参考上海大众汽车有限公司资料)触觉传感器 人的触觉通常包括热觉、冷觉、痛觉、触压觉和力觉等。
机器人触觉是人的触觉的某些模仿。它是有关机器人和对象物
之间直接接触的感觉。通常指以下几种:
触觉: 手指与被测物是否接触.接触图形的检测。
压觉: 垂直于机器人和对象物接触面上的力感觉。
力觉: 机器人动作时各自由度的力感觉。
滑觉: 物体向着垂直于手指把桅面的方向滑动或变形。
触觉传感器 2.1 触觉 触觉是通过与对象物体彼此接触而产生的,所以最好使用手指表面高密度分布触觉传感器阵列,它柔软易于变形,可增大接触面积,并且有一定的强度,便于抓握。接触觉传感器可检测机器人是否接触目标或环境,用于寻找物体或感知碰撞。 结构:平板上安装着多点通、断传感器附
着板的装置
原理:平常为通态,当与物体接触时,弹
簧收缩,上、下板间电流断开。它的功能
相当于一开关,即输出0和1两种信号。
可用于控制机械手的运动方向和范围、
躲避障碍物等。1.导电橡胶;2.金属; 12.衬底; 13.引线触觉传感器 触觉传感器的研究重点: 选择更为合适的敏感材料,研究人工皮肤触觉传感器.现有的材料主要有导电橡胶、压电材料、光纤等;.
将集成电路工艺应用到传感器的设计和制造中,使传感器和处理电路一体化,得到大规模或超大规模阵列式触觉传感器。
触觉传感器的重点集中在阵列式触觉传感器信号的处理上,这种信号的处理涉及到信号处理、图像处理、计算机图形学、人工智能、模式识别等学科,是一门比较复杂、比较困难的技术,还很不成熟,有等于进一步研究和发展.触觉传感器 2.2 压觉压觉指的是对于手指给予被测物的力,或者加在手指上的外力的感觉。它用于握力控制与手的支撑力的检测。
目前的压觉传感器主要是分布是压觉传感器,即通过把分散敏感元件排列成矩阵式格子来设计的。常被用敏感元件阵列单元有:
导电橡胶、感应高分子、应变计、光电器件和霍尔元件.触觉传感器 2.2 压觉这种传感器是在调整器的轴上安装了线性弹簧。一个传感器有l0mm的有效行程。在此范围内,将力的变化转换为长度位移,以便进行俭测。在一侧手指上,每个6mm×8mm的面积分布一个传感器来计算,共排列了28个(四行七排)传感器。左右两侧总共有56个体感器输出。用四路A/D转换器,变速多路调制器对这些输出进行转换后进入计算机。
a为手指抓住物体的状态;b为手指从a状态稍微握紧的状态。触觉传感器 2.3 力觉感知是否夹起了工件或是否夹持在正确部位;
控制装配、打磨、研磨抛光的质量;
装配中提供信息、以产生后续的修正补偿运动来保证装配质量和速度
防止碰撞、卡死和损坏机件。力觉传感器的作用 力觉是指对机器人的指、肢和关节等运动中所受力的感知,主要包括腕力觉、关节力觉和支座力觉等 案例:机器人握力测量案例:玩具机器人(广州中鸣数码 )原理:电机->转角
->电位器
->电阻触觉传感器 2.3 力觉关节力传感器腕力传感器触觉传感器 2.3 力觉 基座力传感器触觉传感器 2.4 滑觉机器人在抓取不知属性的物体时,其自身应能确定最佳握紧力的给定值。
当握紧力不够时,要检测被握紧物体的滑动,利用该检测信号,在不损害物体的前提下,考虑最可靠的夹持方法,实现此功能的传感器称为滑觉传感器。 ??球形滑觉传感器 (举例)传感器如同棋盘一样,相间地用绝缘材料盖住小导电球。
无论滑动方向如何,只要球转动.传感器就会产生脉冲输出。接近觉传感器接近觉传感器接近觉:接近觉是一种粗略的距离感觉,接近觉传感器的主要作用是在接触对象之前获得必要的信息,用来探测在一定距离范围内是否有物体接近、物体的接近距离和对象的表面形状及倾斜等状态,敏感范围可小至几十毫米,甚至1个毫米。在机器人中,主要用于对物体的抓取和躲避。可以认为是介于触觉与视觉之间的感觉。接近觉一般用非接触式测量元件.接近觉传感器有 电磁式
光电式
电容式
气动式
超声波式
红外式等类型
电容式传感器本体由两个极板1,2构成。
极板1由固定频率的正弦波电压激励,2接电荷放大器。0为被接近物。
在传感器两极板与被接近物三者间形成一交变电场。
当0接近1,2时,1,2之间的电场受到了影响,也可以认为0阻断了1、2间连续的电力线。电场的变化引起1、2间电容C12的变化。由于电压幅值恒定,所以电容的变化又反映为极板2上电荷的变化电磁式高频传号is施加于邻近金属一侧的电感线L上;L产生的高频电磁场作用于金属板的表面。由于趋肤效应,高频电磁场不能透过具有一定厚度的金属板,而仅作用于表面薄层内。
而金属板表面感应的涡流严生的电磁场又反作用于线圈L上,改变了电感的大小〔磁场强度的变比也可用另—组检测线圈来检测)。从而感知传感器与被接近物体的距离大小。视觉传感器 每个人都能体会到、眼睛对人来说是多么重要。可以说人类从外界获得的信息,大多数都是从眼睛得到的,研究结果表明,视觉获得的感知信息占人对外界感知信息的80%,是听觉细胞的300多倍.是皮肤感觉细胞的100多倍.从这个角度也可以看出视觉系统的重要性.
视觉传感器是将景物的光信号转换成电信号的器件.2.5 听觉、嗅觉、味觉及其他传感器 除以上介绍的机器人传感器外,还可根据机器人特殊用途安装听觉传感器,嗅觉,味觉传感器及电磁波传感器,而这些机器人主要用于科学研究、海洋资源探测或食品分析、救火等特殊用途。
这些传感器多数属于开发阶段,有待于更进一步完善,以丰富机器人专用功能。 听觉: 具有接近人耳的功能还相差很远;
嗅觉:主要检测空气中的化学成分、浓度、等功能,主要采用气体传感器及射线传感器等。
味觉:对液体进行化学成分的分析。检测味觉方法有pH计、化学分析器等。
其他传感器:如纯工程学的传感器,象磁传感器、安全用传感器和电波传感器等2.6 传感器融合 传感器信息融合又称数据融合,是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。
传感器信息融合技术从多信息的视角进行处理及综合,得到各种信息的内在联系和规律,从而剔除无用的和错误的信息,保留正确的和有用的成分,最终实现信息的优化。它也为智能信息处理技术的研究提供了新的观念。
定义:将经过集成处理的多传感器信息进行合成,形成一种对外部环境或被测对象某一特征的表达方式。概 念2.6 传感器融合机器人系统中使用的传感器种类和数量越来越多,每种传感器都有一定的使用条件和感知范围,并且又能给出环境或对象的部分或整个侧面的信息,为了有效地利用这些传感器信息,需要采用某种形式对传感器信息进行综合、融合处理.
按照人脑的功能和原理进行视觉、听觉、触觉、力觉、知觉、注意、记忆、学习和更高级的认识过程,将空间、时间的信息进行融合,对数据和信息进行自动解释,对环境和态势给予判定。
传感器的融合技术涉及神经网络、知识工程、模糊理论等信息、检测、控制领域的新理论和新方法。 作 用控制和信
息融合计
算机自主移动装配机器人装配机械手力觉传感器触觉传感器视觉传感器超声波传感器激光测距传感器
多传感器信息融合自主移动装配机器人机器人中的传感器信息融合
同课章节目录