苏科版 信息技术 九年级上册 2.2 机器人避障课件(共14张ppt)
文档属性
| 名称 | 苏科版 信息技术 九年级上册 2.2 机器人避障课件(共14张ppt) |

|
|
| 格式 | zip | ||
| 文件大小 | 573.1KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | |||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-08-20 00:00:00 | ||
图片预览




文档简介
课件14张PPT。机器人避障避障机器人——采用用三个轮子支撑,利用微波、红外
探测头探测障碍物,车体可自主调整姿
态躲避障碍。 创新及用途 作为一个载体,能够灵活自如的在一般环境下行走,在其自身附带的超声波和红外线的帮助下躲避障碍物,自身携带电源,能够自主的运行较长时间。经过稍微改装,他可以用来侦察和做普通的家庭服务之类的工作。此机器人我们在结构上有较大的创新,使得行走更加灵活。
避障原理小车在探测到前方的障碍物后,停止,自身调整姿态,在单片机的控制下,每个轮子 转到圆周的切线方向,原地行走一定的角度,当探测到没有障碍物时,停止转动,调整至原来的姿态,继续前进。结构设计小车呈圆盘状,三个金属车轮均匀分布在圆周上,每个轮子分别装有电机及控制方向的舵机,正前方装有微波探测头和红外装置,可以探测到前方的障碍物。
外形参数:直径为240mm的圆形车盘,车体总高100mm,车轮直径为58mm,宽28mm
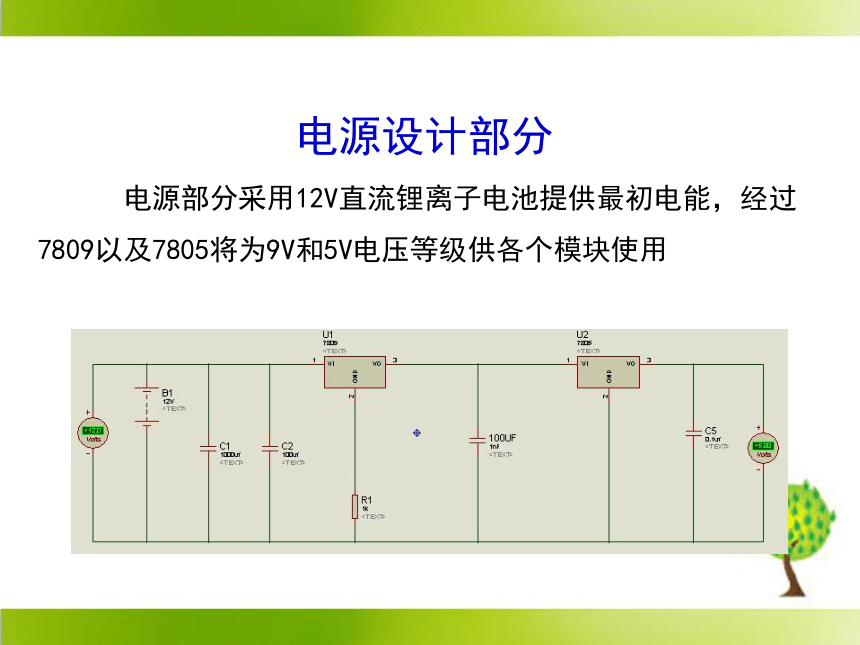
电源设计部分 电源部分采用12V直流锂离子电池提供最初电能,经过7809以及7805将为9V和5V电压等级供各个模块使用2、电机驱动及控制模块 此次电机我们采用L298N芯片进行驱动,IN1等相接52单片机,后采用二级管尽心保护L298N,以免冲击过大,将烧毁,电机我们采用12V直流电机。电机模块设计图 舵机我们采用转角0—180度来控制车轮转向,采用5V电源驱动,PWM波控制输出角度。舵机模块设计图 数码显示模块设计电路数码显示模块 我们采用7段共阴极数码管显示距离,利用74ls573锁存器锁存数据.4超声波模块 超声波传感器模块电路图探测波形红外线模块 工作电压:3.8v-5.5v 工作电流(5V时):典型电流6ma
输入输出信号(3线): VCC GND OUT
GND,VCC是电源,VCC的范围是3.8v-5.5v
探测头探测障碍物,车体可自主调整姿
态躲避障碍。 创新及用途 作为一个载体,能够灵活自如的在一般环境下行走,在其自身附带的超声波和红外线的帮助下躲避障碍物,自身携带电源,能够自主的运行较长时间。经过稍微改装,他可以用来侦察和做普通的家庭服务之类的工作。此机器人我们在结构上有较大的创新,使得行走更加灵活。
避障原理小车在探测到前方的障碍物后,停止,自身调整姿态,在单片机的控制下,每个轮子 转到圆周的切线方向,原地行走一定的角度,当探测到没有障碍物时,停止转动,调整至原来的姿态,继续前进。结构设计小车呈圆盘状,三个金属车轮均匀分布在圆周上,每个轮子分别装有电机及控制方向的舵机,正前方装有微波探测头和红外装置,可以探测到前方的障碍物。
外形参数:直径为240mm的圆形车盘,车体总高100mm,车轮直径为58mm,宽28mm
电源设计部分 电源部分采用12V直流锂离子电池提供最初电能,经过7809以及7805将为9V和5V电压等级供各个模块使用2、电机驱动及控制模块 此次电机我们采用L298N芯片进行驱动,IN1等相接52单片机,后采用二级管尽心保护L298N,以免冲击过大,将烧毁,电机我们采用12V直流电机。电机模块设计图 舵机我们采用转角0—180度来控制车轮转向,采用5V电源驱动,PWM波控制输出角度。舵机模块设计图 数码显示模块设计电路数码显示模块 我们采用7段共阴极数码管显示距离,利用74ls573锁存器锁存数据.4超声波模块 超声波传感器模块电路图探测波形红外线模块 工作电压:3.8v-5.5v 工作电流(5V时):典型电流6ma
输入输出信号(3线): VCC GND OUT
GND,VCC是电源,VCC的范围是3.8v-5.5v
同课章节目录