苏科版 信息技术 九年级上册 3.3 机器人创新设计课件(共10张ppt)
文档属性
| 名称 | 苏科版 信息技术 九年级上册 3.3 机器人创新设计课件(共10张ppt) |
|
|
| 格式 | zip | ||
| 文件大小 | 750.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | |||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-08-20 00:00:00 | ||
图片预览
文档简介
课件10张PPT。机器人创新设计学习目标:初步了解学生机器人创新设计的特点,进一步了解创新设计的方法。
学习感悟:创新是科学技术不断发展的源动力。
学习资源:光盘(各种视频资源)。
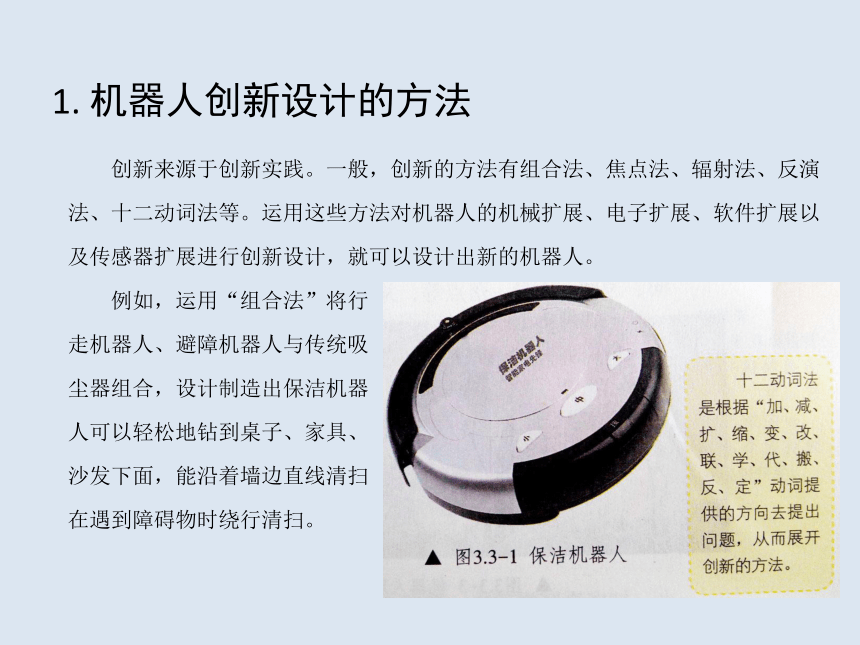
实践创作:制作实验设计书。1. 机器人创新设计的方法 创新来源于创新实践。一般,创新的方法有组合法、焦点法、辐射法、反演
法、十二动词法等。运用这些方法对机器人的机械扩展、电子扩展、软件扩展以
及传感器扩展进行创新设计,就可以设计出新的机器人。
例如,运用“组合法”将行
走机器人、避障机器人与传统吸
尘器组合,设计制造出保洁机器
人可以轻松地钻到桌子、家具、
沙发下面,能沿着墙边直线清扫
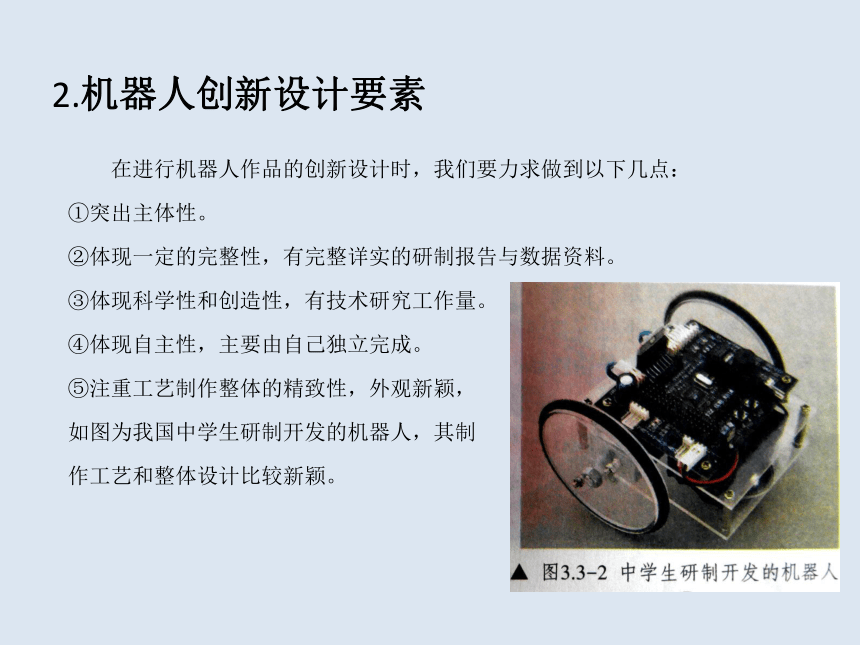
在遇到障碍物时绕行清扫。2.机器人创新设计要素 在进行机器人作品的创新设计时,我们要力求做到以下几点:
①突出主体性。
②体现一定的完整性,有完整详实的研制报告与数据资料。
③体现科学性和创造性,有技术研究工作量。
④体现自主性,主要由自己独立完成。
⑤注重工艺制作整体的精致性,外观新颖,
如图为我国中学生研制开发的机器人,其制
作工艺和整体设计比较新颖。
2.机器人创新设计要素⑥要特别注意安全性,设计活动时不对周边人员构成威胁,不对环境造成破坏。
在2007年“Robo Cup”世界杯青少年组中国赛区中,“舞蹈机器人”很有
创意:让舞蹈机器人分别扮演孙悟空、唐僧、猪八戒、沙僧等形象,通过预先
设置的程序,采取连锁命令的方式,使6个机器人分别采取不同的姿势翩翩起
舞,演出来一场机器人版皮影戏《孙悟空大闹天宫》。
2012年第十二届中国青少年机器人创意获奖项目“乒乓陪练机器人”,不
仅可以陪练球技,发球机器人还可以控制发球的方向、速度、力量、落点等,
并将球收起来,一次最多能收5个球。3.体验学生机器人创新设计3.1“智能家居”设计
为了让机器人走进人们的生活,给生活带来更多的便利,同学们在观察
和学习已有实例基础上,设计了一个“智能家居”,如图所示,它主要由4个
创新点:①光密码锁:在大门口安装了一个光敏传感器作为光密码锁,又制作了一把特
殊频率的光钥匙,并编制了相应的程序,只有用这把光钥匙对准光密码锁,门
才会自动打开。
②防盗报警:一旦有人非法入侵,就会发声并报警。
③智能收衣:智能晾衣架能根据天气(晴雨、晨昏)情况自动晾收衣服。
④跟踪太阳:比较光感值,自动调节太阳能接收器的方向,使其尽量正对太阳,
从而能最大化吸收太阳能,为家居提供充足的能量。
“智能家居”运用了“辐射法”创新设计,通过对光敏传感器的研究,采
用发散性思维,将光敏传感器及技术分别应用在“光密码锁”“智能收
衣”“跟踪太阳”上。3.体验学生机器人创新设计3.2 “悬崖回头车”设计
设计要求:机器人小车在桌面上行进,当行进到桌边时,小车能够感知
自身所处的位置,并自动回头,从而不会掉下桌面。
因此,机器人小车必须安装能感知小车走到桌边的传感器。那么,应选
择什么传感器呢?这时,我们可以采用“焦点法”进行分析和选择。
一种方法是利用红外线传感器。当传感器下方有反射面时,反射光被这
个传感器接收,通过输入端口,将信号传送到单片机的输入口;如果下方没
有反射面时,就没有信号传送到单片机的输入端口。利用这个原理将一个红
外线传感器装在小车的前方,红外线传感器朝下,对着桌面。当小车处在桌
面时,单片机能不断地接收到红外线传感器的信号,小车继续前进;当小车
走到桌子边沿,此时单片机不能接收到红外线传感器的信号,单片机就让小
车后退、转弯,然后再前进。
3.2 “悬崖回头车”设计
另一种方法是采用了一个碰撞传感器代替红外线传感器。这种传感器实
际就是一个简单的限位开关,当开关压下时,输入端口有信号;当开关放松
时,输入端口就没有信号。
分析上述两种传感器,第一种红外线传感器必须要有电路支持,且价格
相对较高;第二种碰撞传感器结构简单,无需电路支持,价格也比较便宜。 探究学习 在下列科学实践中,如何使用单片机、机器人以及其他设备进
行创新设计呢?选择其中的一个问题进行研究和创新设计,并制
作一份实验设计书。
(1)环境科学实验:风速、风向、风力测量;空气、地表温度测量和记录。雨量、水流速度测量;环境噪声超标次数测量;日升和日落时间测量和统计;应用物联网技术实现环境综合记录。
(2)人体运动测量:心跳次数测量;呼吸次数测量;步行步数计数。
(3)科学实验:植物生长情况测量和记录;化学反应吸热、放热测试和记录;平均速度测定;自由落体时间测量。
学习感悟:创新是科学技术不断发展的源动力。
学习资源:光盘(各种视频资源)。
实践创作:制作实验设计书。1. 机器人创新设计的方法 创新来源于创新实践。一般,创新的方法有组合法、焦点法、辐射法、反演
法、十二动词法等。运用这些方法对机器人的机械扩展、电子扩展、软件扩展以
及传感器扩展进行创新设计,就可以设计出新的机器人。
例如,运用“组合法”将行
走机器人、避障机器人与传统吸
尘器组合,设计制造出保洁机器
人可以轻松地钻到桌子、家具、
沙发下面,能沿着墙边直线清扫
在遇到障碍物时绕行清扫。2.机器人创新设计要素 在进行机器人作品的创新设计时,我们要力求做到以下几点:
①突出主体性。
②体现一定的完整性,有完整详实的研制报告与数据资料。
③体现科学性和创造性,有技术研究工作量。
④体现自主性,主要由自己独立完成。
⑤注重工艺制作整体的精致性,外观新颖,
如图为我国中学生研制开发的机器人,其制
作工艺和整体设计比较新颖。
2.机器人创新设计要素⑥要特别注意安全性,设计活动时不对周边人员构成威胁,不对环境造成破坏。
在2007年“Robo Cup”世界杯青少年组中国赛区中,“舞蹈机器人”很有
创意:让舞蹈机器人分别扮演孙悟空、唐僧、猪八戒、沙僧等形象,通过预先
设置的程序,采取连锁命令的方式,使6个机器人分别采取不同的姿势翩翩起
舞,演出来一场机器人版皮影戏《孙悟空大闹天宫》。
2012年第十二届中国青少年机器人创意获奖项目“乒乓陪练机器人”,不
仅可以陪练球技,发球机器人还可以控制发球的方向、速度、力量、落点等,
并将球收起来,一次最多能收5个球。3.体验学生机器人创新设计3.1“智能家居”设计
为了让机器人走进人们的生活,给生活带来更多的便利,同学们在观察
和学习已有实例基础上,设计了一个“智能家居”,如图所示,它主要由4个
创新点:①光密码锁:在大门口安装了一个光敏传感器作为光密码锁,又制作了一把特
殊频率的光钥匙,并编制了相应的程序,只有用这把光钥匙对准光密码锁,门
才会自动打开。
②防盗报警:一旦有人非法入侵,就会发声并报警。
③智能收衣:智能晾衣架能根据天气(晴雨、晨昏)情况自动晾收衣服。
④跟踪太阳:比较光感值,自动调节太阳能接收器的方向,使其尽量正对太阳,
从而能最大化吸收太阳能,为家居提供充足的能量。
“智能家居”运用了“辐射法”创新设计,通过对光敏传感器的研究,采
用发散性思维,将光敏传感器及技术分别应用在“光密码锁”“智能收
衣”“跟踪太阳”上。3.体验学生机器人创新设计3.2 “悬崖回头车”设计
设计要求:机器人小车在桌面上行进,当行进到桌边时,小车能够感知
自身所处的位置,并自动回头,从而不会掉下桌面。
因此,机器人小车必须安装能感知小车走到桌边的传感器。那么,应选
择什么传感器呢?这时,我们可以采用“焦点法”进行分析和选择。
一种方法是利用红外线传感器。当传感器下方有反射面时,反射光被这
个传感器接收,通过输入端口,将信号传送到单片机的输入口;如果下方没
有反射面时,就没有信号传送到单片机的输入端口。利用这个原理将一个红
外线传感器装在小车的前方,红外线传感器朝下,对着桌面。当小车处在桌
面时,单片机能不断地接收到红外线传感器的信号,小车继续前进;当小车
走到桌子边沿,此时单片机不能接收到红外线传感器的信号,单片机就让小
车后退、转弯,然后再前进。
3.2 “悬崖回头车”设计
另一种方法是采用了一个碰撞传感器代替红外线传感器。这种传感器实
际就是一个简单的限位开关,当开关压下时,输入端口有信号;当开关放松
时,输入端口就没有信号。
分析上述两种传感器,第一种红外线传感器必须要有电路支持,且价格
相对较高;第二种碰撞传感器结构简单,无需电路支持,价格也比较便宜。 探究学习 在下列科学实践中,如何使用单片机、机器人以及其他设备进
行创新设计呢?选择其中的一个问题进行研究和创新设计,并制
作一份实验设计书。
(1)环境科学实验:风速、风向、风力测量;空气、地表温度测量和记录。雨量、水流速度测量;环境噪声超标次数测量;日升和日落时间测量和统计;应用物联网技术实现环境综合记录。
(2)人体运动测量:心跳次数测量;呼吸次数测量;步行步数计数。
(3)科学实验:植物生长情况测量和记录;化学反应吸热、放热测试和记录;平均速度测定;自由落体时间测量。
同课章节目录