川教版 信息技术 六年级下第11课 让机器人动起来课件(共15张PPT)
文档属性
| 名称 | 川教版 信息技术 六年级下第11课 让机器人动起来课件(共15张PPT) |

|
|
| 格式 | zip | ||
| 文件大小 | 9.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 川教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-08-25 09:22:56 | ||
图片预览




文档简介
课件15张PPT。第11课 让机器人动起来 引入:播放一段乐高机器人视频
老师提问,学生发表意见
小结,引出本节课讲授内容一、设计、搭建机器人 目前教学使用的机器人有两种形式:
1、有固定外形的机器人,如通用机器人,其特点是:方便安装;
2、积木式机器人,如乐高机器人,其特点是:变化多端。
设计的原则:
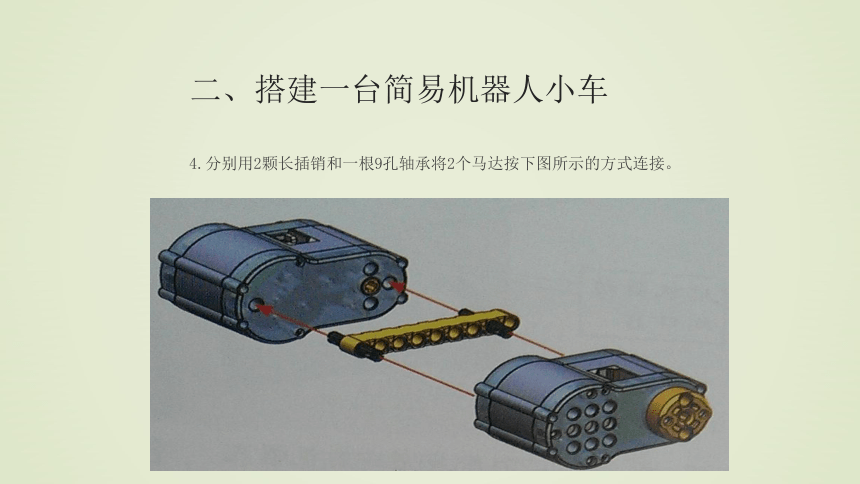
使用最少的部件,实现最好的功能。 二、搭建一台简易机器人小车 1.用4颗短插销讲L型转接件按下图的方式固定在“工”字形车架上。二、搭建一台简易机器人小车 2.分别用2颗长插销和2颗“工”字形连接件,将13孔轴承按图中所示的方式固定在车架上。二、搭建一台简易机器人小车 3.分别用轴、轴承和插销将万向轮按图中所示的方式固定在车架前端。二、搭建一台简易机器人小车 4.分别用2颗长插销和一根9孔轴承将2个马达按下图所示的方式连接。二、搭建一台简易机器人小车 5.分别用长插销、3孔轴承及轴按图中所示的方式将马达、轮子与车架固定。二、搭建一台简易机器人小车 6.再用12颗短插销和3跟13孔轴承,按图中所示的方式固定在车架上,组成控制器支架。二、搭建一台简易机器人小车 7.最后将机器人控制器按图中所示的方式固定到车架上,再分别用连接线将左马达连接到输出端口A,右马达连接到输出端口B,机器人的搭建就全部完成了。三、将机器人与计算机连 接 操作步骤如下(亲自演示):
第一,将机器人通讯电缆的一端插入计算机的USB口里;
第二,将通讯电缆的另一端与机器人的USB口相连,如果你的机器人的USB连接指示灯亮了,说明你的连接正常,否则请检查连接线的两端接口是否松动了。
第三,按下电源开关,当电源指示灯亮了,说明机器人准备就绪。四、下载程 序1、启动智慧LOGO。
2、找到已经写好的程序,如上一节讲的“走正方形”程序。
3、单击工具栏上的“下载”按钮,智慧LOGO会对代码进行错误检查。
4、编译完成后,系统将出现对话框,选择“确认”将你的程序下载到机器人中。
5、当出现程序成功下载的提示框后,即可拔出数据线了。五、程序的执行和调试 1、关闭机器人电源开关。
2、将机器人与通讯电缆分离。
3、找教室外的平地,打开机器人电源开关,观察机器人的运动情况,看看机器人是否按你的要求“走”了一个正方形。
4、根据情况调整程序参数,再下传、执行,直至达到任务的要求。五、程序的执行和调试 注意三点:
第一,为什么要调整运动折算率?
第二,运动折算率的计算方法;
第三是,如何消除运动惯性的影响。 六、探究活动 让机器人按我们的意愿运动。
老师提问,学生发表意见
小结,引出本节课讲授内容一、设计、搭建机器人 目前教学使用的机器人有两种形式:
1、有固定外形的机器人,如通用机器人,其特点是:方便安装;
2、积木式机器人,如乐高机器人,其特点是:变化多端。
设计的原则:
使用最少的部件,实现最好的功能。 二、搭建一台简易机器人小车 1.用4颗短插销讲L型转接件按下图的方式固定在“工”字形车架上。二、搭建一台简易机器人小车 2.分别用2颗长插销和2颗“工”字形连接件,将13孔轴承按图中所示的方式固定在车架上。二、搭建一台简易机器人小车 3.分别用轴、轴承和插销将万向轮按图中所示的方式固定在车架前端。二、搭建一台简易机器人小车 4.分别用2颗长插销和一根9孔轴承将2个马达按下图所示的方式连接。二、搭建一台简易机器人小车 5.分别用长插销、3孔轴承及轴按图中所示的方式将马达、轮子与车架固定。二、搭建一台简易机器人小车 6.再用12颗短插销和3跟13孔轴承,按图中所示的方式固定在车架上,组成控制器支架。二、搭建一台简易机器人小车 7.最后将机器人控制器按图中所示的方式固定到车架上,再分别用连接线将左马达连接到输出端口A,右马达连接到输出端口B,机器人的搭建就全部完成了。三、将机器人与计算机连 接 操作步骤如下(亲自演示):
第一,将机器人通讯电缆的一端插入计算机的USB口里;
第二,将通讯电缆的另一端与机器人的USB口相连,如果你的机器人的USB连接指示灯亮了,说明你的连接正常,否则请检查连接线的两端接口是否松动了。
第三,按下电源开关,当电源指示灯亮了,说明机器人准备就绪。四、下载程 序1、启动智慧LOGO。
2、找到已经写好的程序,如上一节讲的“走正方形”程序。
3、单击工具栏上的“下载”按钮,智慧LOGO会对代码进行错误检查。
4、编译完成后,系统将出现对话框,选择“确认”将你的程序下载到机器人中。
5、当出现程序成功下载的提示框后,即可拔出数据线了。五、程序的执行和调试 1、关闭机器人电源开关。
2、将机器人与通讯电缆分离。
3、找教室外的平地,打开机器人电源开关,观察机器人的运动情况,看看机器人是否按你的要求“走”了一个正方形。
4、根据情况调整程序参数,再下传、执行,直至达到任务的要求。五、程序的执行和调试 注意三点:
第一,为什么要调整运动折算率?
第二,运动折算率的计算方法;
第三是,如何消除运动惯性的影响。 六、探究活动 让机器人按我们的意愿运动。