2019-2020学年北京课改版八年级物理下册 第5章 简单机械单元测试题(有答案)
文档属性
| 名称 | 2019-2020学年北京课改版八年级物理下册 第5章 简单机械单元测试题(有答案) |
|
|
| 格式 | zip | ||
| 文件大小 | 373.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北京课改版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2020-02-24 00:00:00 | ||
图片预览
文档简介
2019-2020学年北京课改版八年级物理下册 第5章 简单机械单元测试题
一.选择题(共8小题,每小题2分,共16分)
1.如图,将餐叉平插入玉米粒根部,用手向下压叉柄,玉米粒便在餐叉的撬动下脱落,这一过程中,餐叉相当于一个( )
A.省力杠杆 B.费力杠杆 C.等臂杠杆 D.省距离杠杆
2.如图所示,用船桨划船的优点是( )
A.能省力 B.省距离
C.既省力又省距离 D.既不省力也不省距离
3.在“研究杠杆的平衡条件”实验中,实验前要调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。在某次实验时,王明同学先调好杠杆的水平位置平衡,然后开始实验,在杠杆两端挂上数目不等的钩码后,发现杠杆左端高、右端低,为了使杠杆恢复到水平位置平衡,以下操作中正确的是( )
A.左端的钩码向右移 B.右端的平衡螺母向左移
C.右端的钩码向左移 D.左端的平衡螺母向右移
4.小明到某山区旅游时,发现一种利用滚轴和绳子组装的特殊机械(如图所示)。当地人借助这种装置可以将较重的物体很轻便地搬运到二楼上面。听主人的介绍,小明知道滚轮B的质量为5kg。小明对此装置充满好奇,经主人同意后,小明借助该装置,在20秒钟内,用很小拉力就能将质量为80千克的重物匀速提升了3米。下列说法正确的是( )
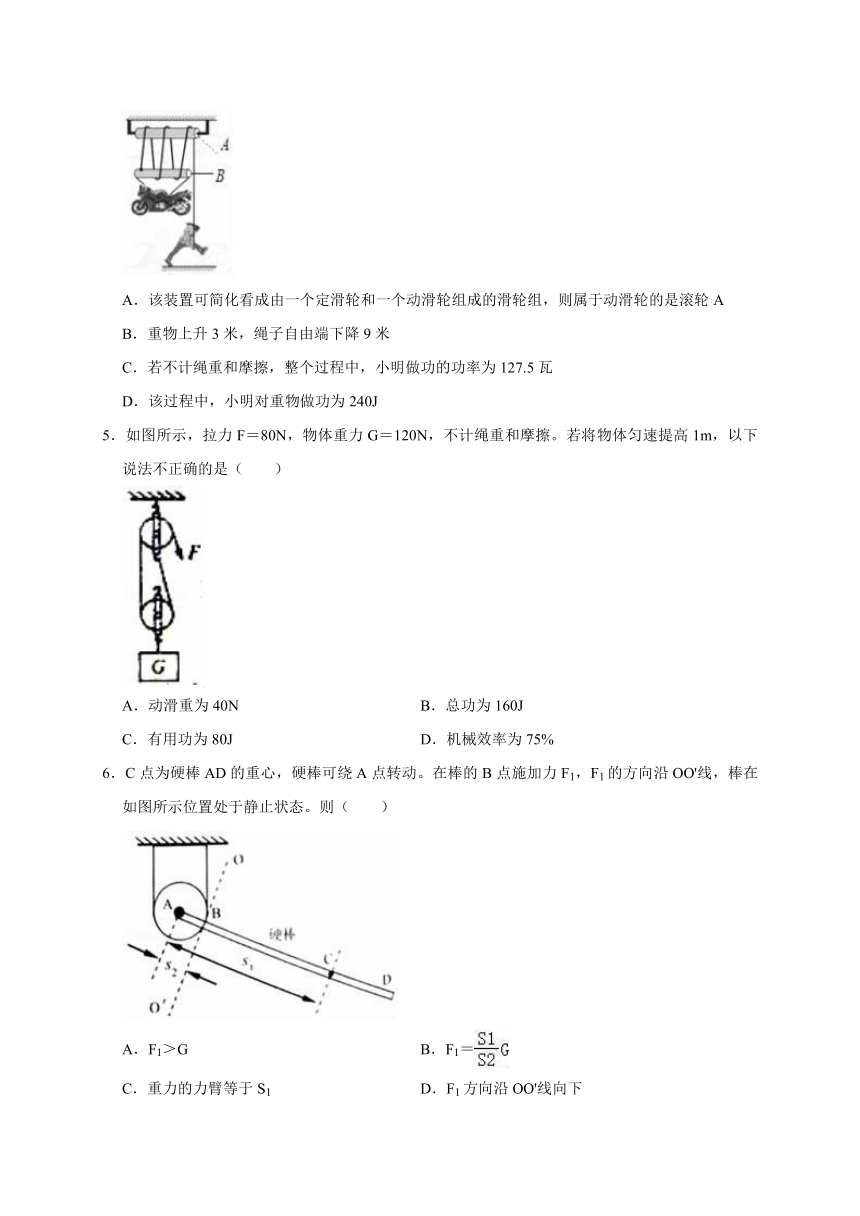
A.该装置可简化看成由一个定滑轮和一个动滑轮组成的滑轮组,则属于动滑轮的是滚轮A
B.重物上升3米,绳子自由端下降9米
C.若不计绳重和摩擦,整个过程中,小明做功的功率为127.5瓦
D.该过程中,小明对重物做功为240J
5.如图所示,拉力F=80N,物体重力G=120N,不计绳重和摩擦。若将物体匀速提高1m,以下说法不正确的是( )
A.动滑重为40N B.总功为160J
C.有用功为80J D.机械效率为75%
6.C点为硬棒AD的重心,硬棒可绕A点转动。在棒的B点施加力F1,F1的方向沿OO'线,棒在如图所示位置处于静止状态。则( )
A.F1>G B.F1=
C.重力的力臂等于S1 D.F1方向沿OO'线向下
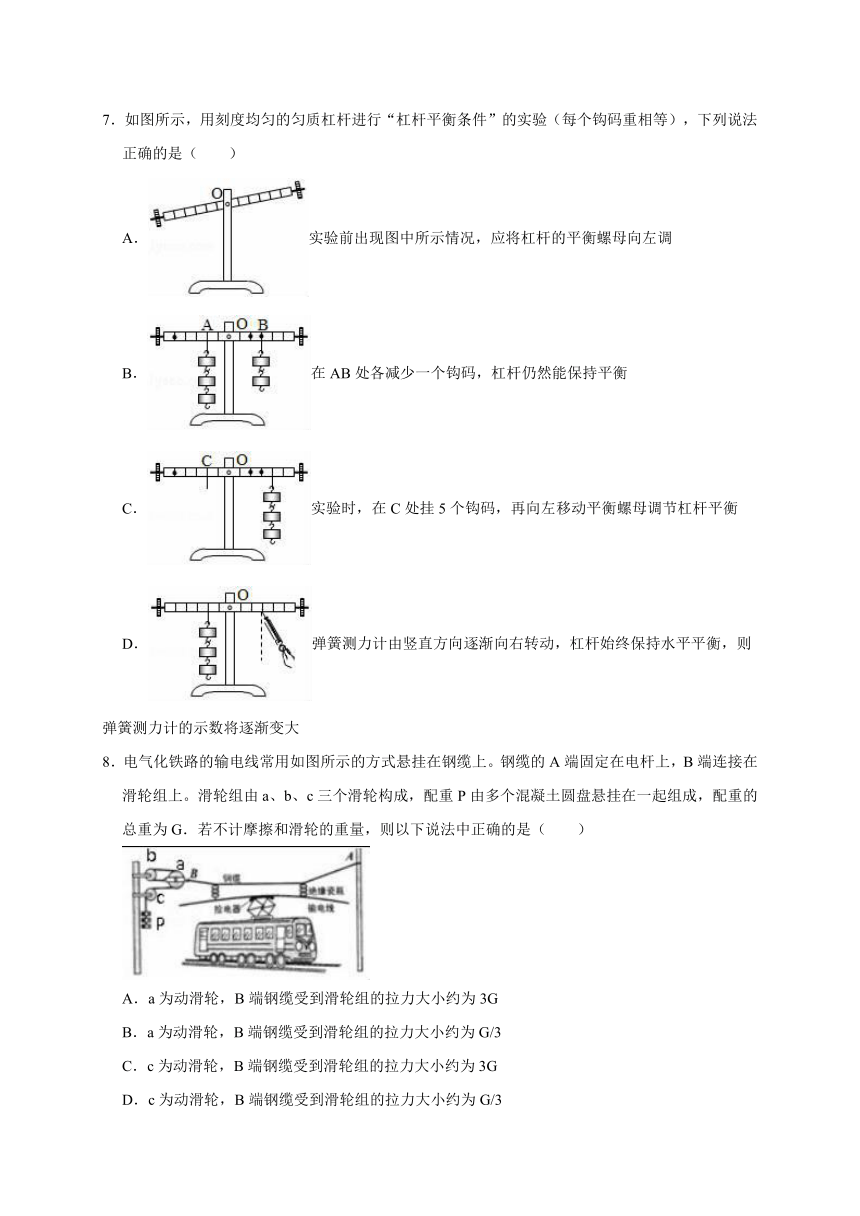
7.如图所示,用刻度均匀的匀质杠杆进行“杠杆平衡条件”的实验(每个钩码重相等),下列说法正确的是( )
A.实验前出现图中所示情况,应将杠杆的平衡螺母向左调
B.在AB处各减少一个钩码,杠杆仍然能保持平衡
C.实验时,在C处挂5个钩码,再向左移动平衡螺母调节杠杆平衡
D.弹簧测力计由竖直方向逐渐向右转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐变大
8.电气化铁路的输电线常用如图所示的方式悬挂在钢缆上。钢缆的A端固定在电杆上,B端连接在滑轮组上。滑轮组由a、b、c三个滑轮构成,配重P由多个混凝土圆盘悬挂在一起组成,配重的总重为G.若不计摩擦和滑轮的重量,则以下说法中正确的是( )
A.a为动滑轮,B端钢缆受到滑轮组的拉力大小约为3G
B.a为动滑轮,B端钢缆受到滑轮组的拉力大小约为G/3
C.c为动滑轮,B端钢缆受到滑轮组的拉力大小约为3G
D.c为动滑轮,B端钢缆受到滑轮组的拉力大小约为G/3
二.填空题(共8小题,每空1分,共18分)
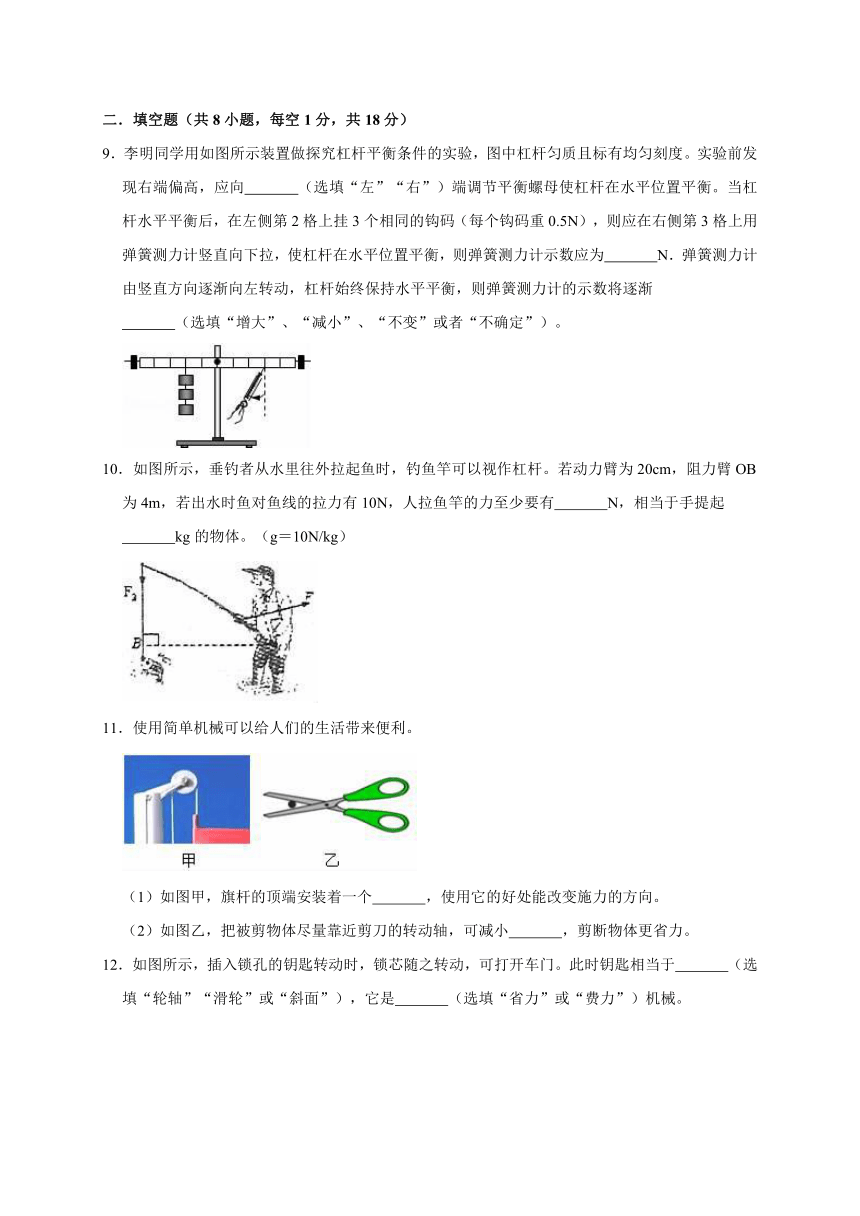
9.李明同学用如图所示装置做探究杠杆平衡条件的实验,图中杠杆匀质且标有均匀刻度。实验前发现右端偏高,应向 (选填“左”“右”)端调节平衡螺母使杠杆在水平位置平衡。当杠杆水平平衡后,在左侧第2格上挂3个相同的钩码(每个钩码重0.5N),则应在右侧第3格上用弹簧测力计竖直向下拉,使杠杆在水平位置平衡,则弹簧测力计示数应为 N.弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐
(选填“增大”、“减小”、“不变”或者“不确定”)。
10.如图所示,垂钓者从水里往外拉起鱼时,钓鱼竿可以视作杠杆。若动力臂为20cm,阻力臂OB为4m,若出水时鱼对鱼线的拉力有10N,人拉鱼竿的力至少要有 N,相当于手提起
kg的物体。(g=10N/kg)
11.使用简单机械可以给人们的生活带来便利。
(1)如图甲,旗杆的顶端安装着一个 ,使用它的好处能改变施力的方向。
(2)如图乙,把被剪物体尽量靠近剪刀的转动轴,可减小 ,剪断物体更省力。
12.如图所示,插入锁孔的钥匙转动时,锁芯随之转动,可打开车门。此时钥匙相当于 (选填“轮轴”“滑轮”或“斜面”),它是 (选填“省力”或“费力”)机械。
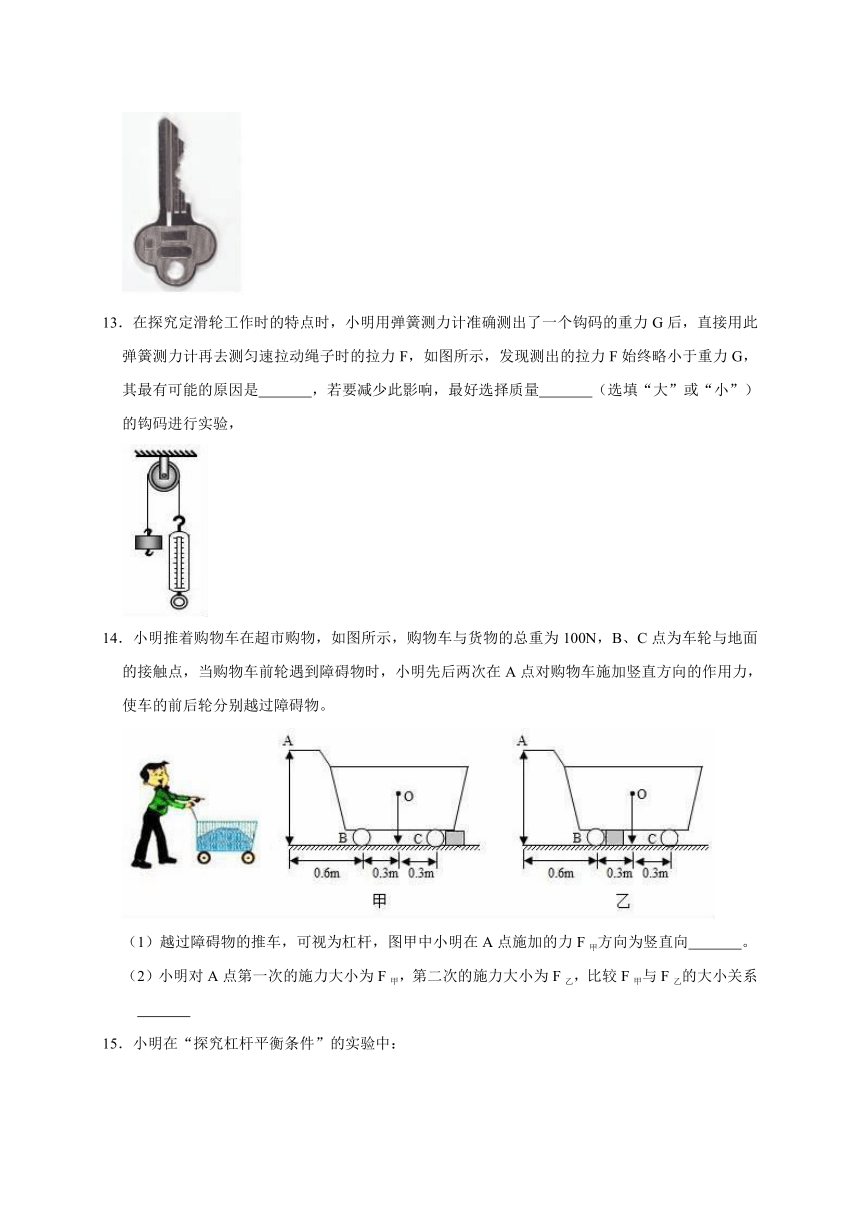
13.在探究定滑轮工作时的特点时,小明用弹簧测力计准确测出了一个钩码的重力G后,直接用此弹簧测力计再去测匀速拉动绳子时的拉力F,如图所示,发现测出的拉力F始终略小于重力G,其最有可能的原因是 ,若要减少此影响,最好选择质量 (选填“大”或“小”)的钩码进行实验,
14.小明推着购物车在超市购物,如图所示,购物车与货物的总重为100N,B、C点为车轮与地面的接触点,当购物车前轮遇到障碍物时,小明先后两次在A点对购物车施加竖直方向的作用力,使车的前后轮分别越过障碍物。
(1)越过障碍物的推车,可视为杠杆,图甲中小明在A点施加的力F甲方向为竖直向 。
(2)小明对A点第一次的施力大小为F甲,第二次的施力大小为F乙,比较F甲与F乙的大小关系
15.小明在“探究杠杆平衡条件”的实验中:
(1)实验前调节平衡蜾母使杠杆在水平位置平衡,目的之一是方便测量 ;
(2)如图甲所示。在杠杆左边A处挂4个钩码,要使杠杆在水平位置平衡,在杠杆B处挂
个钩码(实验中所用的钩码均相同);
(3)小明又用弹簧测力计。在C处竖直向上拉。如图乙所示。当弹簧测力计逐渐向右倾时,使杠杆仍然在水平位置平衡。则弹簧测力计的示数将逐渐 (选填“变大”、“变小”或“不变”)。
16.如图所示为一根硬棒,棒上标出了A、B、C三点,把它作杠杆使用。那么,当以棒上的 点为支点、动力作用在 点、阻力作用在 点时,最省力。
三.作图题(共2小题,每小题5分,共10分)
17.如图所示,在图中画出最省力的绕绳方法;
18.图中杠杆静止,请画出图中力F1和F2的力臂l1和l2;
四.实验探究题(共3小题,每空2分,共26分)
19.同学们共同研究滑轮和滑轮组的特点:
(1)他们研究定滑轮特点时,做的实验如甲图所示,据此可证明:使用定滑轮可以 ,但不可以 。
(2)他们研究动滑轮特点时,用动滑轮匀速竖直提升重物,如乙图所示。据此可知,使用动滑轮可以 ,但不可以 。
(3)他们组装了滑轮组时,他们想:利用滑轮组提升重物能否省力呢?为此,他们进行的实验如丙图所示。请根据丙图信息,写出分析数据的具体过程,并回答他们的问题。
答: 。
20.某物理小组利用刻度均匀的轻质杠杆探究“杠杆平衡条件”:
(1)实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将平衡螺母向 调节,使杠杆在水平位置平衡。
(2)调节杠杆水平平衡后,甲同学在左右两侧分别挂上钩码,如图乙所示,松手后杠杆的 端会下沉,要使杠杆重新在水平位置平衡,如果不改变钩码总数和悬挂点位置,只需将
即可。
(3)调节杠杆水平平衡后,乙同学设计了如图丙所示的方案探究“杠杆平衡条件”,如果在操作过程中,将弹簧测力计从竖直方向慢慢向左侧倾斜,则弹簧测力计的示数将 。本探究方案中,杠杆的自重 (选填“会”或“不会”)给实验结果带来影响。
21.小明的奶奶在家中用电水壶接水时,由于壶口较小,壶盖挡视线,很难观察到壶中水位的变化,结果水从壶中溢出洒到地上,小明一边帮奶奶擦地上的水,一边想:如果给水壶安装一个报警器,当水位达到一定高度时,报警器发出声音,提示水接好了,这样就方便多了。
(1)小明找来家中的电水壶,如图甲所示,观察电水壶的外观并研究它的使用过程,发现其中涉及一些物理知识,下列说法正确的是 (填字母)
A.向壶中注水时,听到的声音是通过空气传入到人耳的
B.金属壶身“反光”是发生了漫反射
C.烧水时壶嘴冒出的“白气”是液化现象
D.注水后壶底看起来变浅了,是光的折射现象
(2)当用力F打开壶盖时,壶盖相当于一个杠杆,请你在图乙中画出壶盖所受重力G的示意图和重力的力臂I(O为支点,B为壶盖的重心,A为F的作用点)。
(3)小明认真思考后,结合学过的力学和电学知识,设计了如图丙所示的报警电路,以下是小明的设计方案,请将其补充完整。
①报警器的水中部分是一个玻璃管,它的一端被绝缘弹性薄膜封闭,报警电路的一部分在玻璃管内,其中弹性片A靠近薄膜,使用时,闭合报警电路开关S,向壶内注水,随着壶中水位的升高、水对薄膜的压力逐渐 (填“变大”或“变小”),弹性薄膜逐渐向右凹进,挤压弹簧片A,直至弹性片A与触点B接触,报警电路接通,电铃发出报警声,提示已达到设定注水高度,即可断开报警电路开关S,停止注水。
②为了满足不同的注水高度要求,该电水壶的报警水位高度可以调节,水位调节手柄的一端固定在报警电路中长度可调的弹簧上,水位调节手柄可以移动,并能固定在不同档位的卡槽中,当水位调节手柄移动时,触电B可以随着它左右移动,请分析该报警电路并说明,想要使报警器在更低的水位报警吗,可以调节水位调节手柄,使触点B向 (填“左”或“右”)移动。
五.计算题(共1小题,共9分)
22.如图所示,一根长木棒AB(质量不计)可以绕支点O转动,木棒的A端用竖直细线连接在地板上,OA=0.6m,OB=0.4m。在木棒的B端通过细线悬挂一个长方体物块C,C的密度为0.8×103kg/m3,B端正下方放一盛满水的溢水杯,溢水杯中水的深度为20cm。现将物块C缓慢浸入溢水杯中,当物块浸入水中一半时,从溢水口处溢出0.5N的水,杠杆处于水平平衡状态。(忽略细线的重力,g取10N/kg)
求:
(1)当物块浸入水中一半时,物块受到的浮力。
(2)物块的体积和物块C受到细线的拉力。
(3)细线作用在A的力和溢水杯底受到水的压强。
六.解答题(共2小题,共21分)
23.肥胖可能会引发许多慢性疾病。某人用如图所示的健身拉力器进行减肥锻炼,配重由若干金属块(每块质量为10kg)组成,锻炼时可以根据自己的实际选择配重的金属块数量。(杆重、绳重、摩擦均不计。)
(1)拉力器上的滑轮均属于 滑轮。
(2)当他选择6块金属块时,把拉杆向下拉动0.5米,若累积拉动100次,则拉力共做了多少功?假设脂肪氧化释放的能量10%用于拉力做功,则相当于消耗多少克脂肪?(已知1克脂肪在体内完全氧化约释放37.5千焦的能量)
24.(1)如图甲所示是工地上常见的独轮车,属于 杠杆(选填“省力”或“费力”);
(2)另有一长1m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力﹣﹣位移传感器竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙所示。据图可知金属杆重为 N;保持F的方向不变,将杠杆从A位置匀速提升到B位置的过程中如图丙,力F将 (选填“变大”、“变小”、或“不变”)。
参考答案与试题解析
一.选择题(共8小题)
1.【解答】解:
用手下压叉柄,撬动的过程中动力臂大于阻力臂,餐叉相当于省力杠杆,费距离。
故选:A。
2.【解答】解:
船桨在使用过程中,动力臂小于阻力臂,是费力杠杆,不能获得更大的动力,但能省距离。
故选:B。
3.【解答】解:
(1)实验前先要调节杠杆两端的平衡螺母,使其在水平位置平衡,实验过程中,调节杠杆在水平位置平衡,是为了便于测量力臂的长度,如杠杆不在水平位置平衡,应通过调节钩码的数量或位置来实现,而不能再调节平衡螺母,故BD错误;
(2)根据杠杆平衡条件F1L1=F2L2,左端上翘,可以将左端钩码向左调节,或将右端钩码向左调节,故A错误,C正确。
故选:C。
4.【解答】解:
A、提升物体时,A的轴固定不动,属于定滑轮;B和物体一起移动,属于动滑轮,故A错误;
B、由图知,n=5,拉力端移动距离:s=5h=5×3m=15m,故B错误;
D、重物重力:G=mg=80kg×10N/kg=800N,
小明对重物做的功:W有=Gh=800N×3m=2400J,故D错误;
C、动滑轮B的重力:G轮=m轮g=5kg×10N/kg=50N;
额外功为:W额=G轮h=50N×3m=150J;
不计绳重和摩擦,整个过程中,小明做的功:W总=W有+W额=2400J+150J=2550J;
则功率为:P===127.5W,故C正确。
故选:C。
5.【解答】解:由图可知,滑轮组绳子的有效股数n=2。
A.不计绳重和摩擦,由F=(G+G动)可得,动滑轮的重力G动=nF﹣G=2×80N﹣120N=40N,故A正确;
B.滑轮组绳端移动的距离s=nh=2×1m=2m,拉力做的总功W总=Fs=80N×2m=160J,故B正确;
C.拉力做的有用功W有=Gh=120N×1m=120J,故C错误;
D.滑轮组的机械效率η=×100%=×100%=75%,故D正确。
故选:C。
6.【解答】解:由图知阻力为杠杆本身的重力,竖直向下,因为动力和阻力使得杠杆转到方向相反,所以动力L1沿OO′竖直向上,画出动力臂和阻力臂,如下图所示:
由图知,F1的方向沿OO′线向上,其力臂L1的长为s2;而G的方向竖直向下,所以其力臂l2是从A点到G的垂线段,小于s1,故CD错误;
由F1L1=GL2知,L1<L1,所以F1一定大于G.故A正确;
此时有F1=<,故B错误。
故选:A。
7.【解答】解:
A、由图可知,杠杆的右端上翘,要使杠杆在水平位置平衡,平衡螺母应向右端移动,故A错误;
B、设一个钩码重为G,一格的长度为L,
原来:3G×2L=2G×3L,杠杆平衡;
在杠杆两侧挂钩码处各减少一个质量相等的钩码,现在:2G×2L>G×3L,所以杠杆不再平衡,杠杆的左端下沉,故B错误;
C、挂上钩码后,实验过程中不能再调节平衡螺母,故C错误;
D、图中弹簧测力计从竖直位置转到倾斜位置,此时拉力F的力臂变短,根据杠杆的平衡条件可知,拉力变大,即测力计的示数变大,故D正确;
故选:D。
8.【解答】解:如图所示,c为定滑轮不省力,b为定滑轮也不省力,
此时B端钢缆承受三段同样大小的配重G,所以选项A正确,
故选:A。
二.填空题(共8小题)
9.【解答】解:(1)实验前杠杆右侧高,左侧低,根据杠杆的平衡条件可知,应向右调节平衡螺母,
(2)设杠杆的一个小格为L,因在右侧第3格上用弹簧测力计竖直向下拉,根据力臂的定义,动力臂为3L,根据根据杠杆平衡条件F1L1=F2L2,即F×3L=3×0.5N×2L,则弹簧测力计示数F=1N;
(3)弹簧测力计在竖直方向向下拉时,动力臂OB,如下所示:
由竖直方向逐渐向左转动,阻力、阻力臂不变,动力臂为直角三角形OBA的直角边OA,
根据数学知识,直角边OA小于斜边OB,动力臂逐渐变小,根据杠杆平衡条件得,动力逐渐变大,弹簧测力计示数将逐渐增大。
故答案为:右端;1;增大。
10.【解答】解:根据杠杆平衡条件可知,F1l1=F2l2,
解得:F1===200N。
由G=mg得,相当于手提起物体的质量:
m====20kg;
故答案为:200;20。
11.【解答】解:
(1)旗杆顶端的滑轮为定滑轮,利用它来升国旗,可以改变施加力的方向;
(2)图中剪刀在使用过程中,在同样的情况下,把被剪物体往剪刀转动轴靠近,减小了阻力臂,由F1L1=F2L2可知:阻力臂L2越小,动力F1越小,即越省力。
故答案为:(1)定滑轮;(2)阻力臂。
12.【解答】解:钥匙在使用时绕中心轴转动,所以属于轮轴,轮轴是杠杆的一种变形;其轮半径和轴半径分别为动力臂和阻力臂,因为动力臂大于阻力臂,所以轮轴是一种省力杠杆。
故答案为:轮轴;省力。
13.【解答】解:用弹簧测力计准确测出了一个钩码的重力G后,再用弹簧测力计通过定滑轮竖直向下匀速拉动绳子时的拉力F始终略小于重力G,原因是受弹簧测力计的拉杆,挂钩和弹簧本身重力的影响,若要减少此影响,最好选择质量大的钩码进行实验。
故答案为:弹簧秤自身的重力;大。
14.【解答】解:(1)当前轮遇障碍物A时,顾客应竖直向下按扶把,这时手推车可看成杠杆,支点是B点;
(2)根据图示可知,小明对A点第一次的施力的支点为B点,第二次施力的支点为C点,显然第一次的动力臂比第二次的阻力臂小,由杠杆平衡条件可知:F甲>F乙。
故答案为:(1)下;(2)F甲>F乙。
15.【解答】解:(1)实验前调节平衡蜾母使杠杆在水平位置平衡,当杠杆在不挂钩码时处于水平平衡状态时,从支点到挂钩码处杠杆的长度即为力臂长度,目的之一是方便测量力臂;
(2)设一个钩码的重力为G,杠杆一个小格代表L,
图中,杠杆的左端:4G×3L=12GL,
B处的力臂为4L,杠杆的右端:F2×4L=12GL,解得F2=3G,即在B处挂3个同样的钩码;
(3)弹簧测力计竖直向上拉杠杆时,拉力力臂为OC,当弹簧测力计逐渐向右倾斜时,拉力的力臂小于OC,拉力力臂变小,拉力变大,弹簧测力计示数变大。
故答案为:(1)力臂;(2)3;(3)变大。
16.【解答】解:读图可知,当以A点为杠杆的支点时,动力作用在C点,则此时杠杆最长的力臂是AC的长,也就是整条杠杆的长;同时,若阻力作用在B点,则AB是三点间最短的距离,可以得到最短的阻力臂,因此,当以棒上的A点为支点、动力作用在C点、阻力作用在B点时,杠杆最省力。
故答案为:A;C;B。
三.作图题(共2小题)
17.【解答】解:图中只有一个动滑轮,要求最省力,则由3段绳子承担物重,是最省力的绕绳方法;绳子先系在动滑轮的固定挂钩上,绕过上面的定滑轮,再绕过动滑轮,如图所示:
18.【解答】解:已知支点为O,延长F1的作用线,过点O作力F1的垂线段L1,作力F2的垂线段L2,那么L1、L2即为所求作的力臂。如图所示:
四.实验探究题(共3小题)
19.【解答】解:(1)从甲图中可看出,三种拉力情况,每次拉力的方向都不相同。在实验过程中不断改变拉力的方向,
观察测力计的示数都为1N,等于物重,可得出结论:定滑轮可以改变力的方向,但不省力。
(2)在图乙中,拉力F=0.6N<G=1N,故使用动滑轮时省力,但不能改变力的方向。
(3)由图可知,物体的重力为2N,测力计的示数为0.8N,故利用滑轮组提升重物能省力。
故答案为:(1)改变力的方向;省力;(2)省力;改变力的方向;(3)由图可知,物体的重力为2N,测力计的示数为0.8N,故利用滑轮组提升重物能省力。
20.【解答】解:(1)图甲中,杠杆右端偏高,说明杠杆的重心在左侧,应将平衡螺母向右调节,使杠杆在水平位置平衡;
(2))设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:
F左L左=F右L右,即4G×2L>G×3L,故左端下沉;要使杠杆重新在水平位置平衡,如果不增加钩码总个数和悬挂点位置,只需要将左侧的钩码去掉一个,右侧钩码增加一个,则有:3G×2L=2G×3L,即可平衡;
(3)保持杠杆处于水平平衡,当弹簧测力计倾斜拉动杠杆时,拉力的力臂变小,但是阻力和阻力臂均不变,根据杠杆平衡条件可知,弹簧测力计的拉力会变大;
因为杠杆的中心位于支点,即杠杆自身重力的力臂为零,因此杠杆的自重不会给实验结果带来影响。
故答案为:(1)右;(2)左;左侧去掉一个钩码,右侧增加一个钩码;(3)变大;不会。
21.【解答】解:(1)A、向壶中注水,水会发生振动产生声音,通过空气传入人耳,故A正确;
B、这里的反光,类似于黑板的反光,不同于从各个角度看到壶身,故此处应为镜面反射,故B错误;
C、烧水时冒出“白气”是由于水蒸气遇冷液化形成的小液滴,故C正确;
D、池底看起来变浅了,是由于发生了光的折射,故D正确。
故选ACD;
(2)B为重心,重力方向是竖直向下的,故竖直向下画出重力,在过支点向重力作用线作垂线,得到对应的力臂,如下图所示:
(3)①随着水位的升高,薄膜所处的深度也在逐渐的增加,其所受的压强和压力变大,因为薄膜受到液体的压力之后弹性薄膜逐渐向右凹进,挤压弹簧片A,直至弹性片A与触点B接触,报警电路接通,电铃发出报警声,提示已达到设定注水高度,即可断开报警电路开关S,停止注水;
②想要使报警器在更低的水位报警,则需要薄膜受到较小的压力即可使A与B触电相连,那么需要让B触点向左靠近一些。
故答案为:(1)ACD;(2)如上图所示;(3)①变大;②左。
五.计算题(共1小题)
22.【解答】解:
(1)由题知,溢水杯内盛满水,物块C浸入水中一半时,受到的浮力:
F浮=G排=G溢=0.5N,
(2)由F浮=ρ液gV排可得排开水的体积:
V排===5×10﹣5m3;
所以物块C的体积:
VC=2V排=2×5×10﹣5m3=1×10﹣4m3;
物块C的重力:
G=mg=ρCVCg=0.8×103kg/m3×1×10﹣4m3×10N/kg=0.8N,
物块C受到细线的拉力:
F拉C=G﹣F浮=0.8N﹣0.5N=0.3N;
(3)由于力的作用是相互的,杠杆B端受到的拉力FB=F拉C=0.3N;
由题知,力臂OA=0.6m、OB=0.4m,
由杠杆平衡条件可得:
FA×OA=FB×OB,
细线作用在A的力:
FA===0.2N;
由题知,溢水杯内盛满水,物块C浸入水时,水溢出,溢水杯内的水深不变,h=20cm=0.2m,
溢水杯底受到水的压强:
p=ρgh=1×103kg/m3×10N/kg×0.2m=2000Pa。
答:(1)当物块浸入水中一半时,物块受到的浮力为0.3N;
(2)物块的体积为1×10﹣4m3,物块C受到细线的拉力为0.3N;
(3)细线作用在A的力为0.2N,溢水杯底受到水的压强为2000Pa。
六.解答题(共2小题)
23.【解答】解:
(1)由图示可知,两滑轮均不随物体运动,所以拉力器上的滑轮均属于定滑轮;
(2)他选择6块金属块时,此时的拉力:
F′=G′=m′g=6×10kg×10N/kg=600N,
把拉杆向下拉动0.5米,若累积拉动100次,则拉力共做功:
W=F′s=600N×0.5m×100=3×104J,
由题意可得,消耗脂肪的质量:
m脂肪==8g。
故答案为:(1)定;(2)拉力共做功3×104J,相当于消耗8克脂肪。
24.【解答】解:(1)独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆。
(2)金属杆重心在中心上,力臂为L2=0.5m,取图象上的一点F=6N,L1=0.2m,
根据杠杆的平衡条件有:GL2=FL1,即G×0.5m=6N×0.2m
解得:G=2.4N。
(3)杠杆在水平位置时,杠杆平衡,根据杠杆平衡条件得,OA×F=OC×G,F=G,
当杠杆匀速提起的过程中,杠杆平衡,根杠杆平衡条件得,OA'×F'=OC'×G,F'=G,
因为△OAA'∽△OCC',所以=,所以F=F'.如图所示。
故答案为:省力;2.4;不变。
一.选择题(共8小题,每小题2分,共16分)
1.如图,将餐叉平插入玉米粒根部,用手向下压叉柄,玉米粒便在餐叉的撬动下脱落,这一过程中,餐叉相当于一个( )
A.省力杠杆 B.费力杠杆 C.等臂杠杆 D.省距离杠杆
2.如图所示,用船桨划船的优点是( )
A.能省力 B.省距离
C.既省力又省距离 D.既不省力也不省距离
3.在“研究杠杆的平衡条件”实验中,实验前要调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。在某次实验时,王明同学先调好杠杆的水平位置平衡,然后开始实验,在杠杆两端挂上数目不等的钩码后,发现杠杆左端高、右端低,为了使杠杆恢复到水平位置平衡,以下操作中正确的是( )
A.左端的钩码向右移 B.右端的平衡螺母向左移
C.右端的钩码向左移 D.左端的平衡螺母向右移
4.小明到某山区旅游时,发现一种利用滚轴和绳子组装的特殊机械(如图所示)。当地人借助这种装置可以将较重的物体很轻便地搬运到二楼上面。听主人的介绍,小明知道滚轮B的质量为5kg。小明对此装置充满好奇,经主人同意后,小明借助该装置,在20秒钟内,用很小拉力就能将质量为80千克的重物匀速提升了3米。下列说法正确的是( )
A.该装置可简化看成由一个定滑轮和一个动滑轮组成的滑轮组,则属于动滑轮的是滚轮A
B.重物上升3米,绳子自由端下降9米
C.若不计绳重和摩擦,整个过程中,小明做功的功率为127.5瓦
D.该过程中,小明对重物做功为240J
5.如图所示,拉力F=80N,物体重力G=120N,不计绳重和摩擦。若将物体匀速提高1m,以下说法不正确的是( )
A.动滑重为40N B.总功为160J
C.有用功为80J D.机械效率为75%
6.C点为硬棒AD的重心,硬棒可绕A点转动。在棒的B点施加力F1,F1的方向沿OO'线,棒在如图所示位置处于静止状态。则( )
A.F1>G B.F1=
C.重力的力臂等于S1 D.F1方向沿OO'线向下
7.如图所示,用刻度均匀的匀质杠杆进行“杠杆平衡条件”的实验(每个钩码重相等),下列说法正确的是( )
A.实验前出现图中所示情况,应将杠杆的平衡螺母向左调
B.在AB处各减少一个钩码,杠杆仍然能保持平衡
C.实验时,在C处挂5个钩码,再向左移动平衡螺母调节杠杆平衡
D.弹簧测力计由竖直方向逐渐向右转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐变大
8.电气化铁路的输电线常用如图所示的方式悬挂在钢缆上。钢缆的A端固定在电杆上,B端连接在滑轮组上。滑轮组由a、b、c三个滑轮构成,配重P由多个混凝土圆盘悬挂在一起组成,配重的总重为G.若不计摩擦和滑轮的重量,则以下说法中正确的是( )
A.a为动滑轮,B端钢缆受到滑轮组的拉力大小约为3G
B.a为动滑轮,B端钢缆受到滑轮组的拉力大小约为G/3
C.c为动滑轮,B端钢缆受到滑轮组的拉力大小约为3G
D.c为动滑轮,B端钢缆受到滑轮组的拉力大小约为G/3
二.填空题(共8小题,每空1分,共18分)
9.李明同学用如图所示装置做探究杠杆平衡条件的实验,图中杠杆匀质且标有均匀刻度。实验前发现右端偏高,应向 (选填“左”“右”)端调节平衡螺母使杠杆在水平位置平衡。当杠杆水平平衡后,在左侧第2格上挂3个相同的钩码(每个钩码重0.5N),则应在右侧第3格上用弹簧测力计竖直向下拉,使杠杆在水平位置平衡,则弹簧测力计示数应为 N.弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐
(选填“增大”、“减小”、“不变”或者“不确定”)。
10.如图所示,垂钓者从水里往外拉起鱼时,钓鱼竿可以视作杠杆。若动力臂为20cm,阻力臂OB为4m,若出水时鱼对鱼线的拉力有10N,人拉鱼竿的力至少要有 N,相当于手提起
kg的物体。(g=10N/kg)
11.使用简单机械可以给人们的生活带来便利。
(1)如图甲,旗杆的顶端安装着一个 ,使用它的好处能改变施力的方向。
(2)如图乙,把被剪物体尽量靠近剪刀的转动轴,可减小 ,剪断物体更省力。
12.如图所示,插入锁孔的钥匙转动时,锁芯随之转动,可打开车门。此时钥匙相当于 (选填“轮轴”“滑轮”或“斜面”),它是 (选填“省力”或“费力”)机械。
13.在探究定滑轮工作时的特点时,小明用弹簧测力计准确测出了一个钩码的重力G后,直接用此弹簧测力计再去测匀速拉动绳子时的拉力F,如图所示,发现测出的拉力F始终略小于重力G,其最有可能的原因是 ,若要减少此影响,最好选择质量 (选填“大”或“小”)的钩码进行实验,
14.小明推着购物车在超市购物,如图所示,购物车与货物的总重为100N,B、C点为车轮与地面的接触点,当购物车前轮遇到障碍物时,小明先后两次在A点对购物车施加竖直方向的作用力,使车的前后轮分别越过障碍物。
(1)越过障碍物的推车,可视为杠杆,图甲中小明在A点施加的力F甲方向为竖直向 。
(2)小明对A点第一次的施力大小为F甲,第二次的施力大小为F乙,比较F甲与F乙的大小关系
15.小明在“探究杠杆平衡条件”的实验中:
(1)实验前调节平衡蜾母使杠杆在水平位置平衡,目的之一是方便测量 ;
(2)如图甲所示。在杠杆左边A处挂4个钩码,要使杠杆在水平位置平衡,在杠杆B处挂
个钩码(实验中所用的钩码均相同);
(3)小明又用弹簧测力计。在C处竖直向上拉。如图乙所示。当弹簧测力计逐渐向右倾时,使杠杆仍然在水平位置平衡。则弹簧测力计的示数将逐渐 (选填“变大”、“变小”或“不变”)。
16.如图所示为一根硬棒,棒上标出了A、B、C三点,把它作杠杆使用。那么,当以棒上的 点为支点、动力作用在 点、阻力作用在 点时,最省力。
三.作图题(共2小题,每小题5分,共10分)
17.如图所示,在图中画出最省力的绕绳方法;
18.图中杠杆静止,请画出图中力F1和F2的力臂l1和l2;
四.实验探究题(共3小题,每空2分,共26分)
19.同学们共同研究滑轮和滑轮组的特点:
(1)他们研究定滑轮特点时,做的实验如甲图所示,据此可证明:使用定滑轮可以 ,但不可以 。
(2)他们研究动滑轮特点时,用动滑轮匀速竖直提升重物,如乙图所示。据此可知,使用动滑轮可以 ,但不可以 。
(3)他们组装了滑轮组时,他们想:利用滑轮组提升重物能否省力呢?为此,他们进行的实验如丙图所示。请根据丙图信息,写出分析数据的具体过程,并回答他们的问题。
答: 。
20.某物理小组利用刻度均匀的轻质杠杆探究“杠杆平衡条件”:
(1)实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将平衡螺母向 调节,使杠杆在水平位置平衡。
(2)调节杠杆水平平衡后,甲同学在左右两侧分别挂上钩码,如图乙所示,松手后杠杆的 端会下沉,要使杠杆重新在水平位置平衡,如果不改变钩码总数和悬挂点位置,只需将
即可。
(3)调节杠杆水平平衡后,乙同学设计了如图丙所示的方案探究“杠杆平衡条件”,如果在操作过程中,将弹簧测力计从竖直方向慢慢向左侧倾斜,则弹簧测力计的示数将 。本探究方案中,杠杆的自重 (选填“会”或“不会”)给实验结果带来影响。
21.小明的奶奶在家中用电水壶接水时,由于壶口较小,壶盖挡视线,很难观察到壶中水位的变化,结果水从壶中溢出洒到地上,小明一边帮奶奶擦地上的水,一边想:如果给水壶安装一个报警器,当水位达到一定高度时,报警器发出声音,提示水接好了,这样就方便多了。
(1)小明找来家中的电水壶,如图甲所示,观察电水壶的外观并研究它的使用过程,发现其中涉及一些物理知识,下列说法正确的是 (填字母)
A.向壶中注水时,听到的声音是通过空气传入到人耳的
B.金属壶身“反光”是发生了漫反射
C.烧水时壶嘴冒出的“白气”是液化现象
D.注水后壶底看起来变浅了,是光的折射现象
(2)当用力F打开壶盖时,壶盖相当于一个杠杆,请你在图乙中画出壶盖所受重力G的示意图和重力的力臂I(O为支点,B为壶盖的重心,A为F的作用点)。
(3)小明认真思考后,结合学过的力学和电学知识,设计了如图丙所示的报警电路,以下是小明的设计方案,请将其补充完整。
①报警器的水中部分是一个玻璃管,它的一端被绝缘弹性薄膜封闭,报警电路的一部分在玻璃管内,其中弹性片A靠近薄膜,使用时,闭合报警电路开关S,向壶内注水,随着壶中水位的升高、水对薄膜的压力逐渐 (填“变大”或“变小”),弹性薄膜逐渐向右凹进,挤压弹簧片A,直至弹性片A与触点B接触,报警电路接通,电铃发出报警声,提示已达到设定注水高度,即可断开报警电路开关S,停止注水。
②为了满足不同的注水高度要求,该电水壶的报警水位高度可以调节,水位调节手柄的一端固定在报警电路中长度可调的弹簧上,水位调节手柄可以移动,并能固定在不同档位的卡槽中,当水位调节手柄移动时,触电B可以随着它左右移动,请分析该报警电路并说明,想要使报警器在更低的水位报警吗,可以调节水位调节手柄,使触点B向 (填“左”或“右”)移动。
五.计算题(共1小题,共9分)
22.如图所示,一根长木棒AB(质量不计)可以绕支点O转动,木棒的A端用竖直细线连接在地板上,OA=0.6m,OB=0.4m。在木棒的B端通过细线悬挂一个长方体物块C,C的密度为0.8×103kg/m3,B端正下方放一盛满水的溢水杯,溢水杯中水的深度为20cm。现将物块C缓慢浸入溢水杯中,当物块浸入水中一半时,从溢水口处溢出0.5N的水,杠杆处于水平平衡状态。(忽略细线的重力,g取10N/kg)
求:
(1)当物块浸入水中一半时,物块受到的浮力。
(2)物块的体积和物块C受到细线的拉力。
(3)细线作用在A的力和溢水杯底受到水的压强。
六.解答题(共2小题,共21分)
23.肥胖可能会引发许多慢性疾病。某人用如图所示的健身拉力器进行减肥锻炼,配重由若干金属块(每块质量为10kg)组成,锻炼时可以根据自己的实际选择配重的金属块数量。(杆重、绳重、摩擦均不计。)
(1)拉力器上的滑轮均属于 滑轮。
(2)当他选择6块金属块时,把拉杆向下拉动0.5米,若累积拉动100次,则拉力共做了多少功?假设脂肪氧化释放的能量10%用于拉力做功,则相当于消耗多少克脂肪?(已知1克脂肪在体内完全氧化约释放37.5千焦的能量)
24.(1)如图甲所示是工地上常见的独轮车,属于 杠杆(选填“省力”或“费力”);
(2)另有一长1m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力﹣﹣位移传感器竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙所示。据图可知金属杆重为 N;保持F的方向不变,将杠杆从A位置匀速提升到B位置的过程中如图丙,力F将 (选填“变大”、“变小”、或“不变”)。
参考答案与试题解析
一.选择题(共8小题)
1.【解答】解:
用手下压叉柄,撬动的过程中动力臂大于阻力臂,餐叉相当于省力杠杆,费距离。
故选:A。
2.【解答】解:
船桨在使用过程中,动力臂小于阻力臂,是费力杠杆,不能获得更大的动力,但能省距离。
故选:B。
3.【解答】解:
(1)实验前先要调节杠杆两端的平衡螺母,使其在水平位置平衡,实验过程中,调节杠杆在水平位置平衡,是为了便于测量力臂的长度,如杠杆不在水平位置平衡,应通过调节钩码的数量或位置来实现,而不能再调节平衡螺母,故BD错误;
(2)根据杠杆平衡条件F1L1=F2L2,左端上翘,可以将左端钩码向左调节,或将右端钩码向左调节,故A错误,C正确。
故选:C。
4.【解答】解:
A、提升物体时,A的轴固定不动,属于定滑轮;B和物体一起移动,属于动滑轮,故A错误;
B、由图知,n=5,拉力端移动距离:s=5h=5×3m=15m,故B错误;
D、重物重力:G=mg=80kg×10N/kg=800N,
小明对重物做的功:W有=Gh=800N×3m=2400J,故D错误;
C、动滑轮B的重力:G轮=m轮g=5kg×10N/kg=50N;
额外功为:W额=G轮h=50N×3m=150J;
不计绳重和摩擦,整个过程中,小明做的功:W总=W有+W额=2400J+150J=2550J;
则功率为:P===127.5W,故C正确。
故选:C。
5.【解答】解:由图可知,滑轮组绳子的有效股数n=2。
A.不计绳重和摩擦,由F=(G+G动)可得,动滑轮的重力G动=nF﹣G=2×80N﹣120N=40N,故A正确;
B.滑轮组绳端移动的距离s=nh=2×1m=2m,拉力做的总功W总=Fs=80N×2m=160J,故B正确;
C.拉力做的有用功W有=Gh=120N×1m=120J,故C错误;
D.滑轮组的机械效率η=×100%=×100%=75%,故D正确。
故选:C。
6.【解答】解:由图知阻力为杠杆本身的重力,竖直向下,因为动力和阻力使得杠杆转到方向相反,所以动力L1沿OO′竖直向上,画出动力臂和阻力臂,如下图所示:
由图知,F1的方向沿OO′线向上,其力臂L1的长为s2;而G的方向竖直向下,所以其力臂l2是从A点到G的垂线段,小于s1,故CD错误;
由F1L1=GL2知,L1<L1,所以F1一定大于G.故A正确;
此时有F1=<,故B错误。
故选:A。
7.【解答】解:
A、由图可知,杠杆的右端上翘,要使杠杆在水平位置平衡,平衡螺母应向右端移动,故A错误;
B、设一个钩码重为G,一格的长度为L,
原来:3G×2L=2G×3L,杠杆平衡;
在杠杆两侧挂钩码处各减少一个质量相等的钩码,现在:2G×2L>G×3L,所以杠杆不再平衡,杠杆的左端下沉,故B错误;
C、挂上钩码后,实验过程中不能再调节平衡螺母,故C错误;
D、图中弹簧测力计从竖直位置转到倾斜位置,此时拉力F的力臂变短,根据杠杆的平衡条件可知,拉力变大,即测力计的示数变大,故D正确;
故选:D。
8.【解答】解:如图所示,c为定滑轮不省力,b为定滑轮也不省力,
此时B端钢缆承受三段同样大小的配重G,所以选项A正确,
故选:A。
二.填空题(共8小题)
9.【解答】解:(1)实验前杠杆右侧高,左侧低,根据杠杆的平衡条件可知,应向右调节平衡螺母,
(2)设杠杆的一个小格为L,因在右侧第3格上用弹簧测力计竖直向下拉,根据力臂的定义,动力臂为3L,根据根据杠杆平衡条件F1L1=F2L2,即F×3L=3×0.5N×2L,则弹簧测力计示数F=1N;
(3)弹簧测力计在竖直方向向下拉时,动力臂OB,如下所示:
由竖直方向逐渐向左转动,阻力、阻力臂不变,动力臂为直角三角形OBA的直角边OA,
根据数学知识,直角边OA小于斜边OB,动力臂逐渐变小,根据杠杆平衡条件得,动力逐渐变大,弹簧测力计示数将逐渐增大。
故答案为:右端;1;增大。
10.【解答】解:根据杠杆平衡条件可知,F1l1=F2l2,
解得:F1===200N。
由G=mg得,相当于手提起物体的质量:
m====20kg;
故答案为:200;20。
11.【解答】解:
(1)旗杆顶端的滑轮为定滑轮,利用它来升国旗,可以改变施加力的方向;
(2)图中剪刀在使用过程中,在同样的情况下,把被剪物体往剪刀转动轴靠近,减小了阻力臂,由F1L1=F2L2可知:阻力臂L2越小,动力F1越小,即越省力。
故答案为:(1)定滑轮;(2)阻力臂。
12.【解答】解:钥匙在使用时绕中心轴转动,所以属于轮轴,轮轴是杠杆的一种变形;其轮半径和轴半径分别为动力臂和阻力臂,因为动力臂大于阻力臂,所以轮轴是一种省力杠杆。
故答案为:轮轴;省力。
13.【解答】解:用弹簧测力计准确测出了一个钩码的重力G后,再用弹簧测力计通过定滑轮竖直向下匀速拉动绳子时的拉力F始终略小于重力G,原因是受弹簧测力计的拉杆,挂钩和弹簧本身重力的影响,若要减少此影响,最好选择质量大的钩码进行实验。
故答案为:弹簧秤自身的重力;大。
14.【解答】解:(1)当前轮遇障碍物A时,顾客应竖直向下按扶把,这时手推车可看成杠杆,支点是B点;
(2)根据图示可知,小明对A点第一次的施力的支点为B点,第二次施力的支点为C点,显然第一次的动力臂比第二次的阻力臂小,由杠杆平衡条件可知:F甲>F乙。
故答案为:(1)下;(2)F甲>F乙。
15.【解答】解:(1)实验前调节平衡蜾母使杠杆在水平位置平衡,当杠杆在不挂钩码时处于水平平衡状态时,从支点到挂钩码处杠杆的长度即为力臂长度,目的之一是方便测量力臂;
(2)设一个钩码的重力为G,杠杆一个小格代表L,
图中,杠杆的左端:4G×3L=12GL,
B处的力臂为4L,杠杆的右端:F2×4L=12GL,解得F2=3G,即在B处挂3个同样的钩码;
(3)弹簧测力计竖直向上拉杠杆时,拉力力臂为OC,当弹簧测力计逐渐向右倾斜时,拉力的力臂小于OC,拉力力臂变小,拉力变大,弹簧测力计示数变大。
故答案为:(1)力臂;(2)3;(3)变大。
16.【解答】解:读图可知,当以A点为杠杆的支点时,动力作用在C点,则此时杠杆最长的力臂是AC的长,也就是整条杠杆的长;同时,若阻力作用在B点,则AB是三点间最短的距离,可以得到最短的阻力臂,因此,当以棒上的A点为支点、动力作用在C点、阻力作用在B点时,杠杆最省力。
故答案为:A;C;B。
三.作图题(共2小题)
17.【解答】解:图中只有一个动滑轮,要求最省力,则由3段绳子承担物重,是最省力的绕绳方法;绳子先系在动滑轮的固定挂钩上,绕过上面的定滑轮,再绕过动滑轮,如图所示:
18.【解答】解:已知支点为O,延长F1的作用线,过点O作力F1的垂线段L1,作力F2的垂线段L2,那么L1、L2即为所求作的力臂。如图所示:
四.实验探究题(共3小题)
19.【解答】解:(1)从甲图中可看出,三种拉力情况,每次拉力的方向都不相同。在实验过程中不断改变拉力的方向,
观察测力计的示数都为1N,等于物重,可得出结论:定滑轮可以改变力的方向,但不省力。
(2)在图乙中,拉力F=0.6N<G=1N,故使用动滑轮时省力,但不能改变力的方向。
(3)由图可知,物体的重力为2N,测力计的示数为0.8N,故利用滑轮组提升重物能省力。
故答案为:(1)改变力的方向;省力;(2)省力;改变力的方向;(3)由图可知,物体的重力为2N,测力计的示数为0.8N,故利用滑轮组提升重物能省力。
20.【解答】解:(1)图甲中,杠杆右端偏高,说明杠杆的重心在左侧,应将平衡螺母向右调节,使杠杆在水平位置平衡;
(2))设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:
F左L左=F右L右,即4G×2L>G×3L,故左端下沉;要使杠杆重新在水平位置平衡,如果不增加钩码总个数和悬挂点位置,只需要将左侧的钩码去掉一个,右侧钩码增加一个,则有:3G×2L=2G×3L,即可平衡;
(3)保持杠杆处于水平平衡,当弹簧测力计倾斜拉动杠杆时,拉力的力臂变小,但是阻力和阻力臂均不变,根据杠杆平衡条件可知,弹簧测力计的拉力会变大;
因为杠杆的中心位于支点,即杠杆自身重力的力臂为零,因此杠杆的自重不会给实验结果带来影响。
故答案为:(1)右;(2)左;左侧去掉一个钩码,右侧增加一个钩码;(3)变大;不会。
21.【解答】解:(1)A、向壶中注水,水会发生振动产生声音,通过空气传入人耳,故A正确;
B、这里的反光,类似于黑板的反光,不同于从各个角度看到壶身,故此处应为镜面反射,故B错误;
C、烧水时冒出“白气”是由于水蒸气遇冷液化形成的小液滴,故C正确;
D、池底看起来变浅了,是由于发生了光的折射,故D正确。
故选ACD;
(2)B为重心,重力方向是竖直向下的,故竖直向下画出重力,在过支点向重力作用线作垂线,得到对应的力臂,如下图所示:
(3)①随着水位的升高,薄膜所处的深度也在逐渐的增加,其所受的压强和压力变大,因为薄膜受到液体的压力之后弹性薄膜逐渐向右凹进,挤压弹簧片A,直至弹性片A与触点B接触,报警电路接通,电铃发出报警声,提示已达到设定注水高度,即可断开报警电路开关S,停止注水;
②想要使报警器在更低的水位报警,则需要薄膜受到较小的压力即可使A与B触电相连,那么需要让B触点向左靠近一些。
故答案为:(1)ACD;(2)如上图所示;(3)①变大;②左。
五.计算题(共1小题)
22.【解答】解:
(1)由题知,溢水杯内盛满水,物块C浸入水中一半时,受到的浮力:
F浮=G排=G溢=0.5N,
(2)由F浮=ρ液gV排可得排开水的体积:
V排===5×10﹣5m3;
所以物块C的体积:
VC=2V排=2×5×10﹣5m3=1×10﹣4m3;
物块C的重力:
G=mg=ρCVCg=0.8×103kg/m3×1×10﹣4m3×10N/kg=0.8N,
物块C受到细线的拉力:
F拉C=G﹣F浮=0.8N﹣0.5N=0.3N;
(3)由于力的作用是相互的,杠杆B端受到的拉力FB=F拉C=0.3N;
由题知,力臂OA=0.6m、OB=0.4m,
由杠杆平衡条件可得:
FA×OA=FB×OB,
细线作用在A的力:
FA===0.2N;
由题知,溢水杯内盛满水,物块C浸入水时,水溢出,溢水杯内的水深不变,h=20cm=0.2m,
溢水杯底受到水的压强:
p=ρgh=1×103kg/m3×10N/kg×0.2m=2000Pa。
答:(1)当物块浸入水中一半时,物块受到的浮力为0.3N;
(2)物块的体积为1×10﹣4m3,物块C受到细线的拉力为0.3N;
(3)细线作用在A的力为0.2N,溢水杯底受到水的压强为2000Pa。
六.解答题(共2小题)
23.【解答】解:
(1)由图示可知,两滑轮均不随物体运动,所以拉力器上的滑轮均属于定滑轮;
(2)他选择6块金属块时,此时的拉力:
F′=G′=m′g=6×10kg×10N/kg=600N,
把拉杆向下拉动0.5米,若累积拉动100次,则拉力共做功:
W=F′s=600N×0.5m×100=3×104J,
由题意可得,消耗脂肪的质量:
m脂肪==8g。
故答案为:(1)定;(2)拉力共做功3×104J,相当于消耗8克脂肪。
24.【解答】解:(1)独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆。
(2)金属杆重心在中心上,力臂为L2=0.5m,取图象上的一点F=6N,L1=0.2m,
根据杠杆的平衡条件有:GL2=FL1,即G×0.5m=6N×0.2m
解得:G=2.4N。
(3)杠杆在水平位置时,杠杆平衡,根据杠杆平衡条件得,OA×F=OC×G,F=G,
当杠杆匀速提起的过程中,杠杆平衡,根杠杆平衡条件得,OA'×F'=OC'×G,F'=G,
因为△OAA'∽△OCC',所以=,所以F=F'.如图所示。
故答案为:省力;2.4;不变。
同课章节目录
- 第一章 常见的运动
- 一、长度和时间的测量
- 二、机械运动
- 三、比较运动的快慢
- 四、学生实验:测量速度
- 五、声音的产生和传播
- 六、乐音和噪声
- 七、超声波及其应用
- 课外探究 水杯琴
- 第二章 质量和密度
- 一、质量及测量
- 二、学生实验:测量质量
- 三、物质的密度及其应用
- 四、学生实验:测量密度
- 第三章 运动和力
- 一、力
- 二、力的测量
- 三、重力
- 四、二力平衡
- 五、滑动摩擦力
- 六、运动和力的关系
- 课外探究 防滑运动鞋
- 第四章 压强与浮力
- 一、压力 压强
- 二、探究液体压强
- 三、连通器
- 四、大气压强
- 五、液体的压强与流速的关系
- 六、浮力
- 七、物体的浮沉条件
- 第五章 简单机械
- 一、杠杆
- 二、学生实验:探究杠杆
- 三、滑轮
- 课外探究 变速自行车
- 第六章 功和能
- 一、功
- 二、功率
- 三、功的原理
- 四、机械能
- 第七章 热现象
- 一、温度、温度计
- 二、熔化和凝固
- 三、汽化和液化
- 四、升华和凝华
- 五、物质结构的微观模型
- 六、内能 能量转化
- 七、比热容
- 八、燃料 能源与环保
- 九、热机
- 第八章 光现象
- 一、光的传播
- 二、学生实验:探究光的反射规律
- 三、学生实验:探究平面镜成像
- 四、探究光的折射现象
- 五、透镜
- 六、学生实验:探究凸透镜成像
- 七、生活中的透镜
- 八、眼睛和眼镜
- 九、物体的颜色