4.17自动跟踪——红外传感器和碰撞传感器的综合应用 课件 (共13张PPT)
文档属性
| 名称 | 4.17自动跟踪——红外传感器和碰撞传感器的综合应用 课件 (共13张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 2.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 清华大学版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-02-27 18:12:23 | ||
图片预览


文档简介
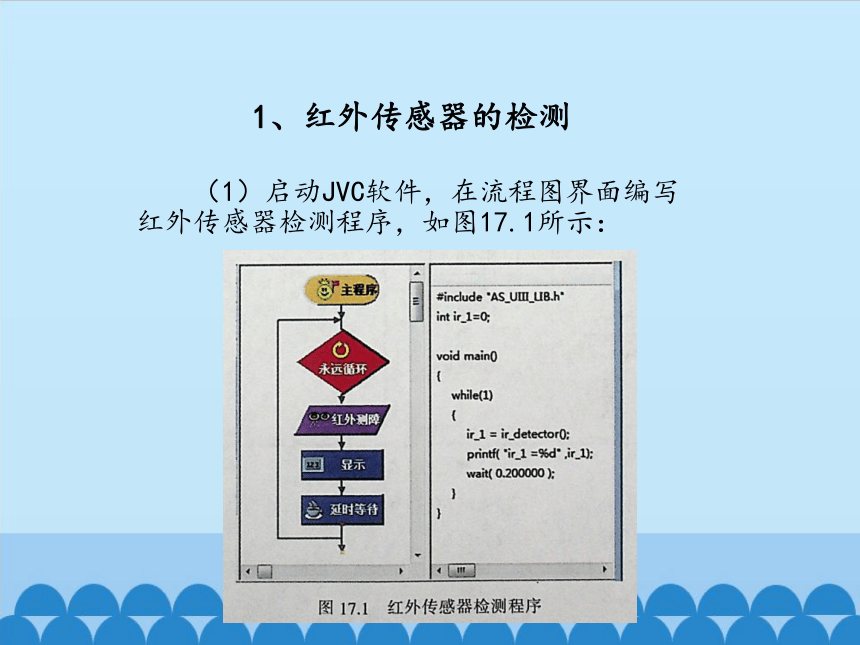
课件13张PPT。自动跟踪——红外传感器和碰撞传感器的综合应用任务导航本课,我们将对红外传感器和碰撞传感器进行综合应用,学会综合应用传感器的方法。1、红外传感器的检测 (1)启动JVC软件,在流程图界面编写红外传感器检测程序,如图17.1所示:(2)连接机器人,下载红外传感器检测程序。
(3)运行红外传感器检测程序。
(4)把机器人放在距离障碍物20cm的地方,观察LCD显示屏的数值。
(5)把机器人慢慢往后移动,当机器人“看不到”障碍物时,就是最远的距离。2、碰撞传感器的检测(1)在流程图界面编写碰撞传感器检测程序,如图17.2所示:(2)连接机器人,下载碰撞传感器检测程序。
(3)运行碰撞传感器检测程序。
(4)用手按压碰撞环,观察LCD显示屏,以确定碰撞环是否完好。3、编写自动跟踪程序(1)在流程图界面编写机器人自动跟踪的程序,如图17.3所示:(2)给机器人下载自动跟踪程序。
(3)关闭机器人电源,断开下载连接线。4、实验、观察运行效果(1)把机器人放在没有障碍物的空旷地带。
(2)打开机器人电源开关,运行程序。
(3)用手掌或一个本书放在机器人的正前方(可视范围内),机器人发现障碍物会马上往前走,这时迅速把手或书抬起来,当机器人看不到障碍物时,就会马上停下来。(4)再把手或书放在机器人左前方,当机器人发现障碍物时,会往左前方运动,迅速移开障碍物,机器人会停下来。
(5)用同样的方法验证右前方出现障碍物时机器人的反应。知识着陆1、当机器人在使用两个以上传感器时,就有了一个优先判断的问题。此处,先判断有无碰撞,在判断有无障碍。
2、机器人的基本运动,要放在识别环境的主要传感器中。此处是放在红外传感器检测中。创作天地 在此实验中,可把机器人没有看到障碍物原地等待,改为机器人原地旋转“寻找”跟踪物体。谢 谢
(3)运行红外传感器检测程序。
(4)把机器人放在距离障碍物20cm的地方,观察LCD显示屏的数值。
(5)把机器人慢慢往后移动,当机器人“看不到”障碍物时,就是最远的距离。2、碰撞传感器的检测(1)在流程图界面编写碰撞传感器检测程序,如图17.2所示:(2)连接机器人,下载碰撞传感器检测程序。
(3)运行碰撞传感器检测程序。
(4)用手按压碰撞环,观察LCD显示屏,以确定碰撞环是否完好。3、编写自动跟踪程序(1)在流程图界面编写机器人自动跟踪的程序,如图17.3所示:(2)给机器人下载自动跟踪程序。
(3)关闭机器人电源,断开下载连接线。4、实验、观察运行效果(1)把机器人放在没有障碍物的空旷地带。
(2)打开机器人电源开关,运行程序。
(3)用手掌或一个本书放在机器人的正前方(可视范围内),机器人发现障碍物会马上往前走,这时迅速把手或书抬起来,当机器人看不到障碍物时,就会马上停下来。(4)再把手或书放在机器人左前方,当机器人发现障碍物时,会往左前方运动,迅速移开障碍物,机器人会停下来。
(5)用同样的方法验证右前方出现障碍物时机器人的反应。知识着陆1、当机器人在使用两个以上传感器时,就有了一个优先判断的问题。此处,先判断有无碰撞,在判断有无障碍。
2、机器人的基本运动,要放在识别环境的主要传感器中。此处是放在红外传感器检测中。创作天地 在此实验中,可把机器人没有看到障碍物原地等待,改为机器人原地旋转“寻找”跟踪物体。谢 谢
同课章节目录
- 第1单元 未来伙伴
- 第1课 能力风暴——机器人仿真系统的应用
- 第2课 方圆之间——“转向”模块与正多边形设计
- 第3课 神奇美图——循环嵌套与规则图形设计
- 第4课 争创第一——“启动电机”模块和“延时等待”模块
- 第5课 歌声嘹亮——子程序设计和机器人发音
- 第2单元 非凡智慧
- 第6课 奔向光明——亮度传感器的应用和条件控制
- 第7课 昂首阔步——红外传感器和机器人的避障行走
- 第8课 碰撞运动——碰撞传感器和机器人的避碰行走
- 第9课 循线而行——地面传感器和机器人的循线行走
- 第3单元 身经百战
- 第10课 绕月飞行——传感器检测模块的条件判断和子程序的应用
- 第11课 赶赴火场——“系统时间”检测模块的应用
- 第12课 智闯迷宫——机器人走迷宫的行走规则
- 第4单元 友好相处
- 第13课 忠诚卫士——红外传感器和计数器的应用
- 第14课 金鸡报晓——光敏传感器和多任务的应用
- 第15课 随光奏乐——光敏传感器和自定义模块的应用
- 第16课 音乐之声——碰撞传感器的应用
- 第5单元* STEM专题拓展