2.8 综合活动2 机器人救援比赛 课件(13张ppt)
文档属性
| 名称 | 2.8 综合活动2 机器人救援比赛 课件(13张ppt) |
|
|
| 格式 | zip | ||
| 文件大小 | 358.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-03-18 13:11:18 | ||
图片预览

文档简介
课件13张PPT。
第八节 综合活动2: 机器人救援比赛比比谁的循迹机器人速度快一 、活动任务1.任务内容
制作救援机器人,参加机器人救援比赛。
2.任务说明
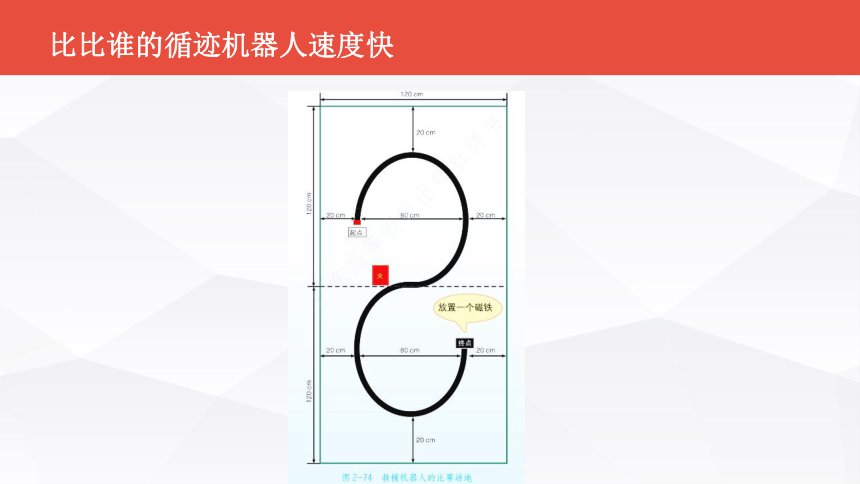
(1)比赛方式。机器人从起点出发,沿着反“S”形轨迹,中途遇到“火源”会停下来灭火,然后继续走轨迹,最后到达终点,电机停止即任务完成。
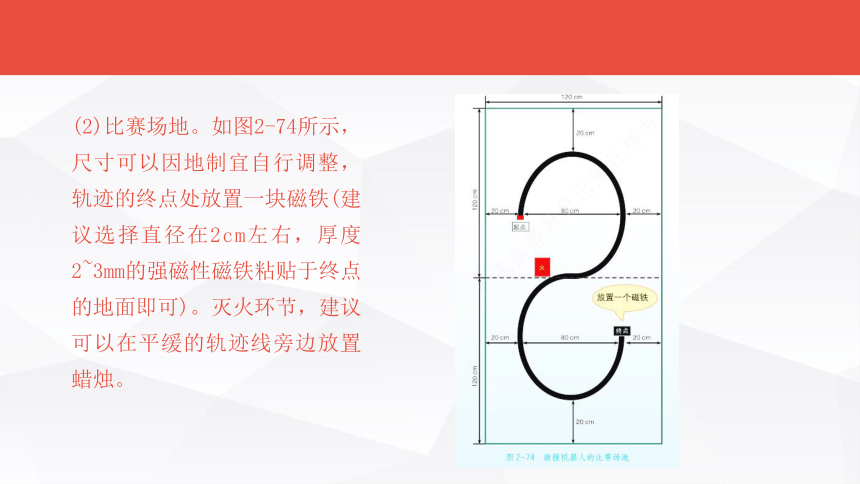
具体计分细则请参考表2-11,分数相同时以完成任务的时间长短来决定名次。(2)比赛场地。如图2-74所示,尺寸可以因地制宜自行调整,轨迹的终点处放置一块磁铁(建议选择直径在2cm左右,厚度2~3mm的强磁性磁铁粘贴于终点的地面即可)。灭火环节,建议可以在平缓的轨迹线旁边放置蜡烛。交流机器人沿着反“S"形轨迹线从地图的起点走到终点,遇到“火源”会停下来灭火,在终点处能检测到磁场并停下来,这需要机器人具备什么功能呢?3.任务分析 ( 1)机器人从起点出发,需要沿着救援地图的轨迹线行走,这时可应用
轨迹识别传感器按循迹机器人的设计方法来实现。
(2)机器人遇到火源应及时灭火,这时可应用火焰传感器按灭火机器人
灭火的设计方法来实现。
(3)当机器人走完轨迹线到达终点时,需要能识别标志终点的磁场,然后停下来。因为轨迹识别传感器只负责识别地面的轨迹线,如何让机器人有效地识别磁场呢?需要选择一种适合近距离识别磁场的传感器。二、应用磁敏传感器1.认识磁敏传感器
由于需要探测磁场,所以为了让机器人拥有可以探测磁场的能力,可以选择磁敏传感器( 如图2-75所示)。磁敏传感器的探测距离与磁场的磁力级别有关,一般探测距离在2mm~ 1 cm之间,磁力越强,越容易被探测到。2.磁敏传感器的设置在RC图形化编程软件中,磁敏传感器是一种数字传感器,它的图标为 ,变量名为“ 磁敏变量”。在程序中,设置窗口如图2-76所示。3. 磁敏传感器的应用磁敏变量有两个返回值,即“0”和“1”。当磁敏变量等于1时,表示发现磁场,这时说明到终点了,机器人应该让电机停止;当磁敏变量等于0时,表示没有发现磁 场,机器人则执行走轨迹程序。三、设计与制作1.准备材料
要制作活动要求的救援机器人,首先要根据其功能特点分析出需要哪些零部件组成,并逐一配齐。 把救援机器人所需的零部件和数量填写在表2-12中。2.活动过程前期工作准备好后,就可以进行程序的编写、硬件的搭建及下载程序,最后调试程序,请同学们根据这个过程填写表2-13的活动记录。3.难点与提示难点1:机器人走起轨迹来像醉汉走路,不但速度慢而且还晃来晃去的,这是什么原因呢?
提示:这可能是因为两个轨迹识别传感器之间的距离太近了,调节距离适当即可。
难点2:机器人遇到火源没有停下来灭火,或火没有灭掉机器人又继续走轨迹,这是什么原因呢?
提示:这是因为火焰传感器的摆放位置和火源的位置可能比较远,可利用积木件调节火焰传感器的位置或提高火焰传感器的灵敏度,让火焰传感器更好地感应火源。同时,应尽量保证风扇的风向对准火源,
难点3:机器人在终点处没有停下来,这是什么原因呢?
提示:这是因为磁敏传感器的摆放位置和磁铁的位置可能比较远,利用积木件调节磁敏传感器的位置,让磁敏传感器在终点处时更容易接近磁铁即可。或者将磁铁更换为磁性级别更高的磁铁也可以。
四、成果总结与交流比赛结束后,各小组要认真总结并相互交流自己的编程思路、搭建经验,以及在活动中遇到的问题和解决的方案,并参照表2-14对本次实践活动进行评价。
制作救援机器人,参加机器人救援比赛。
2.任务说明
(1)比赛方式。机器人从起点出发,沿着反“S”形轨迹,中途遇到“火源”会停下来灭火,然后继续走轨迹,最后到达终点,电机停止即任务完成。
具体计分细则请参考表2-11,分数相同时以完成任务的时间长短来决定名次。(2)比赛场地。如图2-74所示,尺寸可以因地制宜自行调整,轨迹的终点处放置一块磁铁(建议选择直径在2cm左右,厚度2~3mm的强磁性磁铁粘贴于终点的地面即可)。灭火环节,建议可以在平缓的轨迹线旁边放置蜡烛。交流机器人沿着反“S"形轨迹线从地图的起点走到终点,遇到“火源”会停下来灭火,在终点处能检测到磁场并停下来,这需要机器人具备什么功能呢?3.任务分析 ( 1)机器人从起点出发,需要沿着救援地图的轨迹线行走,这时可应用
轨迹识别传感器按循迹机器人的设计方法来实现。
(2)机器人遇到火源应及时灭火,这时可应用火焰传感器按灭火机器人
灭火的设计方法来实现。
(3)当机器人走完轨迹线到达终点时,需要能识别标志终点的磁场,然后停下来。因为轨迹识别传感器只负责识别地面的轨迹线,如何让机器人有效地识别磁场呢?需要选择一种适合近距离识别磁场的传感器。二、应用磁敏传感器1.认识磁敏传感器
由于需要探测磁场,所以为了让机器人拥有可以探测磁场的能力,可以选择磁敏传感器( 如图2-75所示)。磁敏传感器的探测距离与磁场的磁力级别有关,一般探测距离在2mm~ 1 cm之间,磁力越强,越容易被探测到。2.磁敏传感器的设置在RC图形化编程软件中,磁敏传感器是一种数字传感器,它的图标为 ,变量名为“ 磁敏变量”。在程序中,设置窗口如图2-76所示。3. 磁敏传感器的应用磁敏变量有两个返回值,即“0”和“1”。当磁敏变量等于1时,表示发现磁场,这时说明到终点了,机器人应该让电机停止;当磁敏变量等于0时,表示没有发现磁 场,机器人则执行走轨迹程序。三、设计与制作1.准备材料
要制作活动要求的救援机器人,首先要根据其功能特点分析出需要哪些零部件组成,并逐一配齐。 把救援机器人所需的零部件和数量填写在表2-12中。2.活动过程前期工作准备好后,就可以进行程序的编写、硬件的搭建及下载程序,最后调试程序,请同学们根据这个过程填写表2-13的活动记录。3.难点与提示难点1:机器人走起轨迹来像醉汉走路,不但速度慢而且还晃来晃去的,这是什么原因呢?
提示:这可能是因为两个轨迹识别传感器之间的距离太近了,调节距离适当即可。
难点2:机器人遇到火源没有停下来灭火,或火没有灭掉机器人又继续走轨迹,这是什么原因呢?
提示:这是因为火焰传感器的摆放位置和火源的位置可能比较远,可利用积木件调节火焰传感器的位置或提高火焰传感器的灵敏度,让火焰传感器更好地感应火源。同时,应尽量保证风扇的风向对准火源,
难点3:机器人在终点处没有停下来,这是什么原因呢?
提示:这是因为磁敏传感器的摆放位置和磁铁的位置可能比较远,利用积木件调节磁敏传感器的位置,让磁敏传感器在终点处时更容易接近磁铁即可。或者将磁铁更换为磁性级别更高的磁铁也可以。
四、成果总结与交流比赛结束后,各小组要认真总结并相互交流自己的编程思路、搭建经验,以及在活动中遇到的问题和解决的方案,并参照表2-14对本次实践活动进行评价。