粤教版信息技术 第三册下 5 自动避障机器人 课件(18张ppt)
文档属性
| 名称 | 粤教版信息技术 第三册下 5 自动避障机器人 课件(18张ppt) |
|
|
| 格式 | zip | ||
| 文件大小 | 15.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-03-25 00:00:00 | ||
图片预览




文档简介
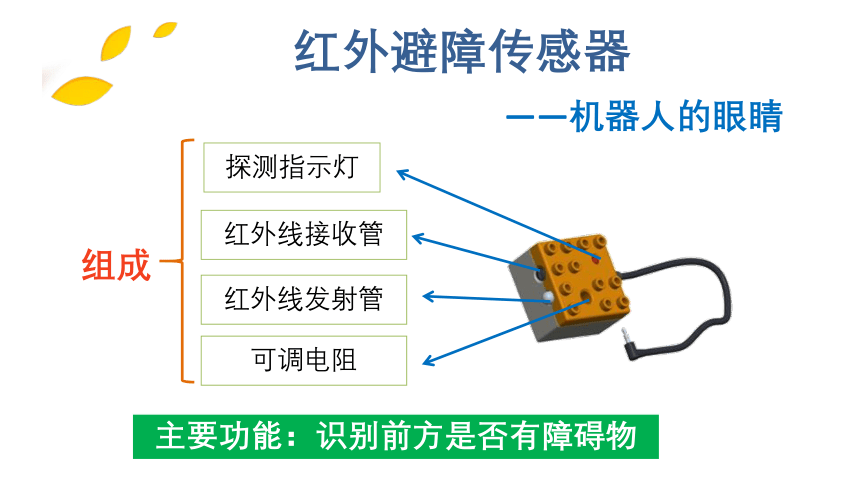
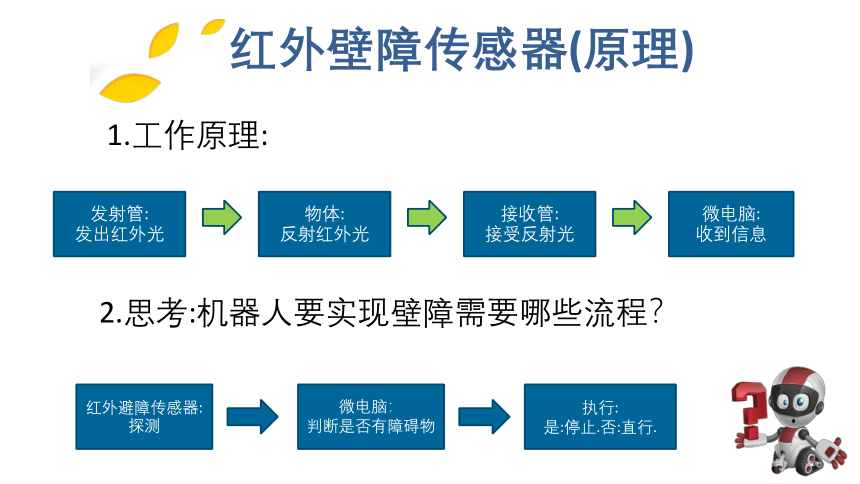
课件18张PPT。自动避障机器人思考:机器人如何避开障碍物呢?认识红外避障传感器红外避障传感器——机器人的眼睛组成探测指示灯红外线接收管红外线发射管可调电阻主要功能:识别前方是否有障碍物红外壁障传感器(原理)1.工作原理:发射管:
发出红外光物体:
反射红外光接收管:
接受反射光微电脑:
收到信息2.思考:机器人要实现壁障需要哪些流程?红外避障传感器:
探测微电脑:
判断是否有障碍物执行:
是:停止.否:直行.编写程序添加永久循环——不停地通过红外避障传感器检测
前方是否有障碍物添加红外壁障传感器变量设置为“红外避障变量1”,用于存储机器人前方的红外避障传感器信号。传感器输入端口P1——给机器人装上眼睛添加条件判断红外避障变量==1
表示红外避障传感器检测到前方有障碍物。机器人
语言1和01:有障碍物
0:无障碍物——判断前方是否有障碍物添加 转向模块——检测到障碍物马上转向转向角度:90o
避免机器人转向过大或过小,碰撞到障碍物添加 “高速电机” 模块左电机转速:100
右电机转速:100——没有障碍物前进模拟仿真机器人避障进入仿真界面添加障碍物仿真添加避障物设置探测距离添加障碍物组成迷宫机器人走迷宫仿真机器人能走出来吗?你的收获?谢谢
发出红外光物体:
反射红外光接收管:
接受反射光微电脑:
收到信息2.思考:机器人要实现壁障需要哪些流程?红外避障传感器:
探测微电脑:
判断是否有障碍物执行:
是:停止.否:直行.编写程序添加永久循环——不停地通过红外避障传感器检测
前方是否有障碍物添加红外壁障传感器变量设置为“红外避障变量1”,用于存储机器人前方的红外避障传感器信号。传感器输入端口P1——给机器人装上眼睛添加条件判断红外避障变量==1
表示红外避障传感器检测到前方有障碍物。机器人
语言1和01:有障碍物
0:无障碍物——判断前方是否有障碍物添加 转向模块——检测到障碍物马上转向转向角度:90o
避免机器人转向过大或过小,碰撞到障碍物添加 “高速电机” 模块左电机转速:100
右电机转速:100——没有障碍物前进模拟仿真机器人避障进入仿真界面添加障碍物仿真添加避障物设置探测距离添加障碍物组成迷宫机器人走迷宫仿真机器人能走出来吗?你的收获?谢谢