苏教版简易机器人制作教材分析
图片预览

文档简介
(共36张PPT)
SOLUTION
FOR HI-TECH
EDUCATION
高中《简易机器人制作》配套教学具
智慧天下产品与苏教版教材大纲高度一致
智慧天下产品全面覆盖苏教版教材内容
教学使用案例
一、与教材大纲的匹配
智慧天下《简易机器人制作》配套教学具产品与苏教版《简易机器人制作》教材大纲高度一致。
苏教版教材 智慧天下产品
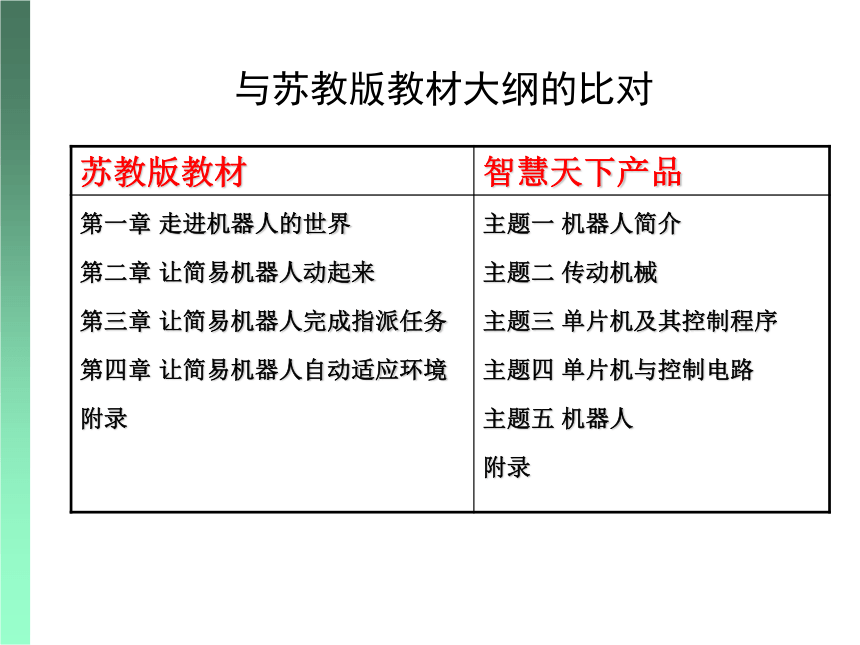
第一章 走进机器人的世界
第二章 让简易机器人动起来
第三章 让简易机器人完成指派任务
第四章 让简易机器人自动适应环境
附录 主题一 机器人简介
主题二 传动机械
主题三 单片机及其控制程序
主题四 单片机与控制电路
主题五 机器人
附录
与苏教版教材大纲的比对
苏教版教材 智慧天下产品
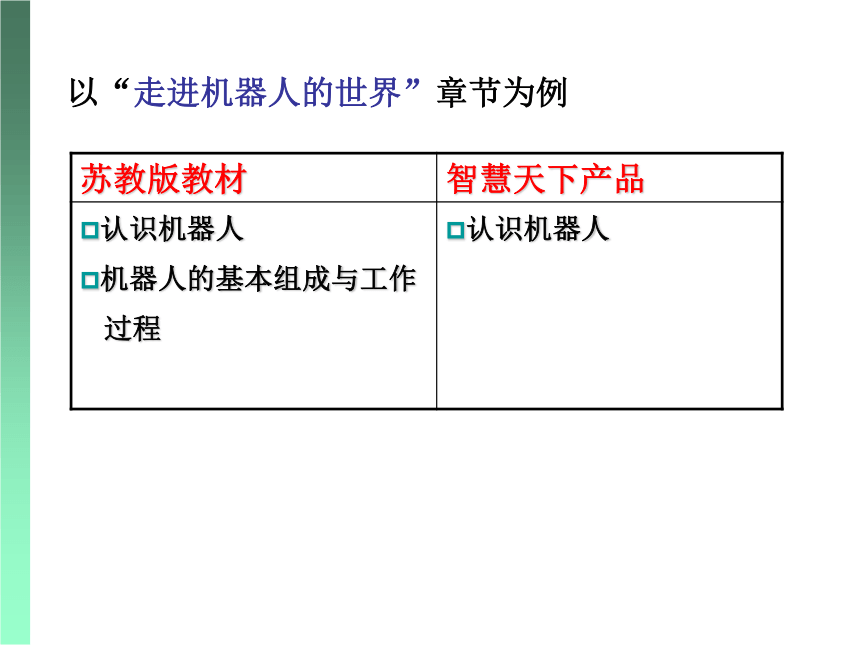
认识机器人
机器人的基本组成与工作
过程
认识机器人
以“走进机器人的世界”章节为例
苏教版教材 智慧天下产品
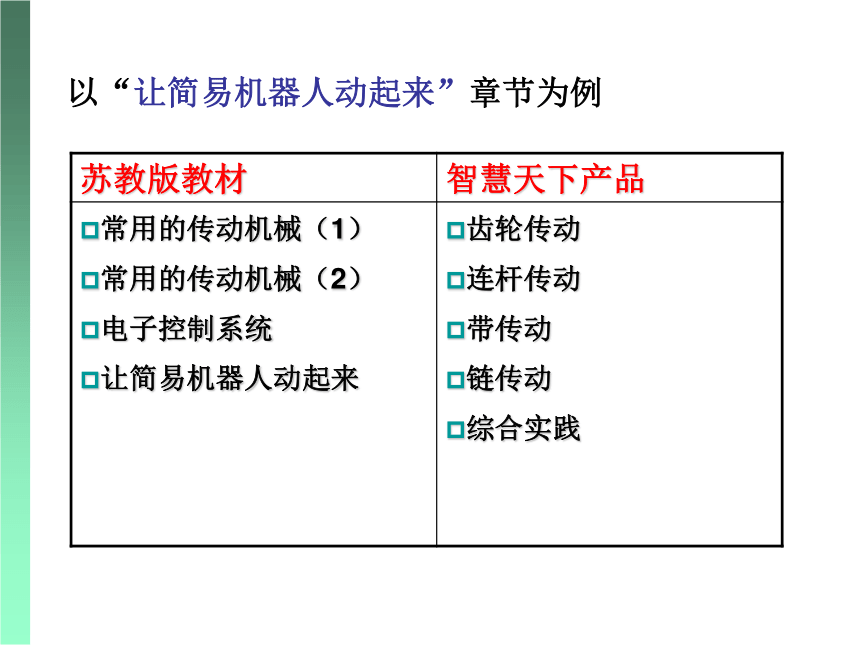
常用的传动机械(1)
常用的传动机械(2)
电子控制系统
让简易机器人动起来 齿轮传动
连杆传动
带传动
链传动
综合实践
以“让简易机器人动起来”章节为例
苏教版教材 智慧天下产品
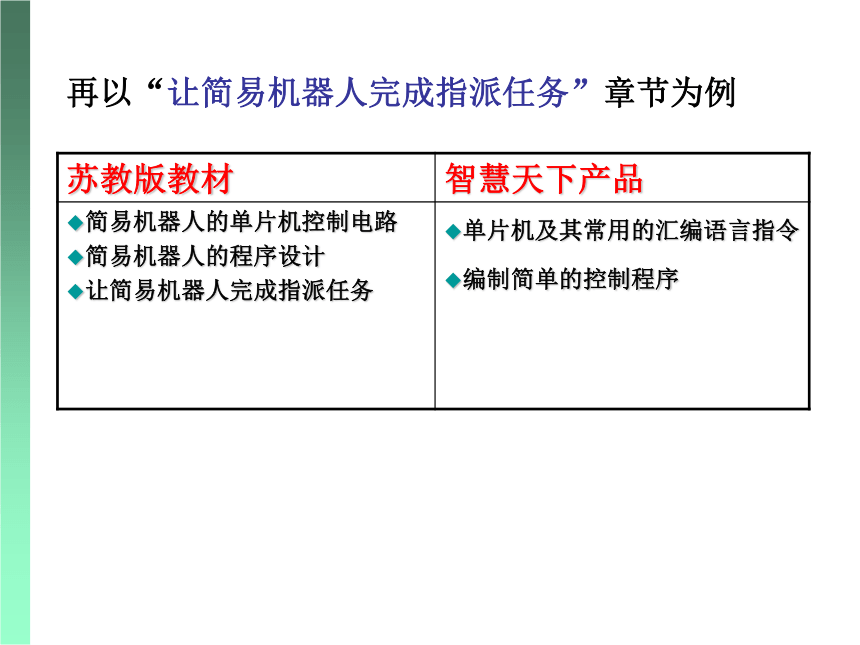
简易机器人的单片机控制电路
简易机器人的程序设计
让简易机器人完成指派任务 单片机及其常用的汇编语言指令
编制简单的控制程序
再以“让简易机器人完成指派任务”章节为例
苏教版教材 智慧天下产品
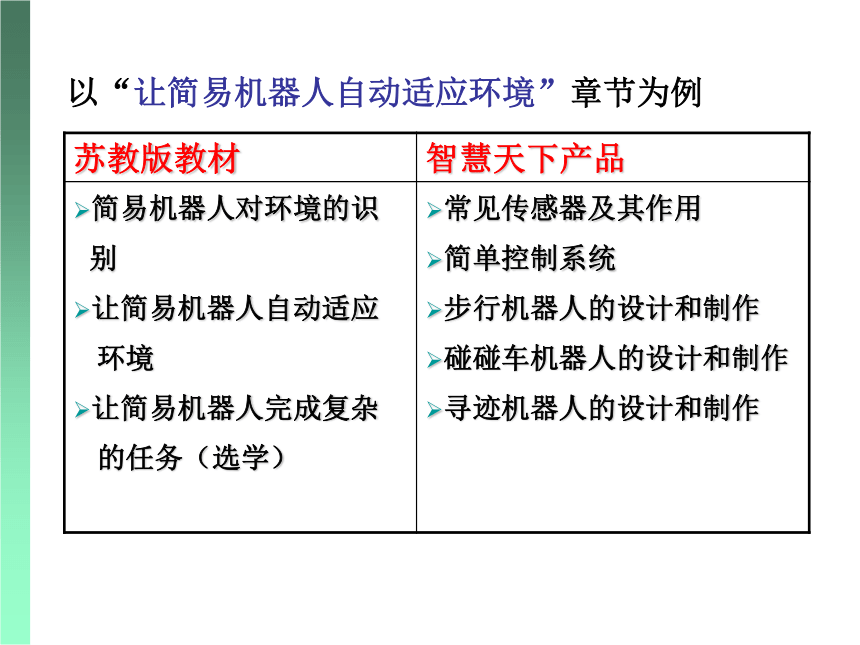
简易机器人对环境的识
别
让简易机器人自动适应
环境
让简易机器人完成复杂
的任务(选学)
常见传感器及其作用
简单控制系统
步行机器人的设计和制作
碰碰车机器人的设计和制作
寻迹机器人的设计和制作
以“让简易机器人自动适应环境”章节为例
二、与教材内容的匹配
智慧天下《简易机器人制作》配套教学具产品全面覆盖苏教版《简易机器人制作》教材的所涉内容。
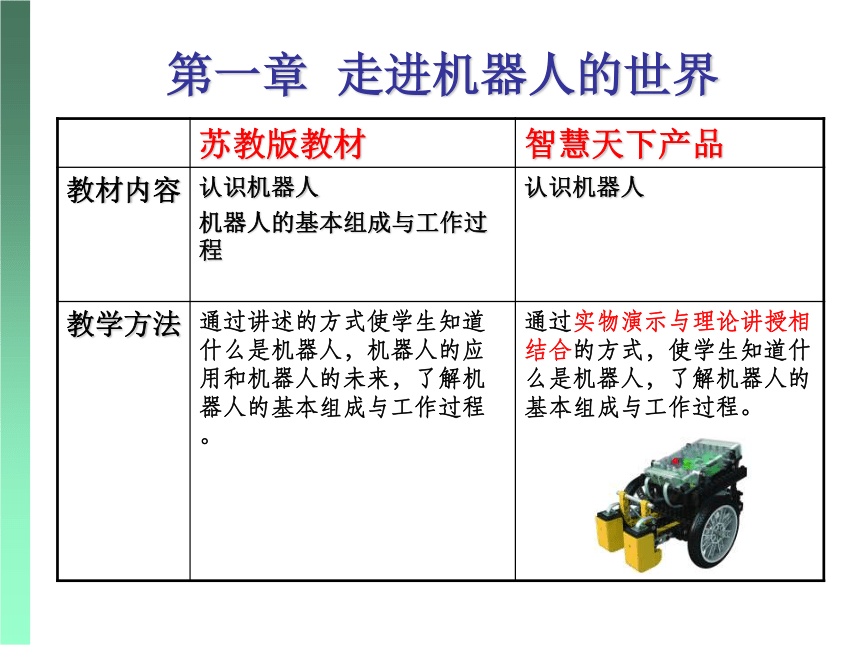
第一章 走进机器人的世界
苏教版教材 智慧天下产品
教材内容 认识机器人
机器人的基本组成与工作过程 认识机器人
教学方法 通过讲述的方式使学生知道什么是机器人,机器人的应用和机器人的未来,了解机器人的基本组成与工作过程。 通过实物演示与理论讲授相结合的方式,使学生知道什么是机器人,了解机器人的基本组成与工作过程。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第一节
常用的传动机械(1) 第一节
齿轮传动
学生活动 活动1:
试验目的:通过简单齿轮箱的安装调试,了解齿轮箱的结构,探究转速和转动力矩的关系。
试验器材:模型齿轮箱、电动机、螺丝刀、电源
试验过程:组装一个由两对齿轮啮合的齿轮箱,启动电动机,观察齿轮箱的运转,改变出入电动机的电源正、负极接线,观察齿轮箱输出轴转动方向发生的变化。 活动1:齿轮装置
试验目的:了解齿轮传动有改变速度和改变方向的功能,能够计算简单的齿轮传动比,了解圆锥齿轮的传动特点。
试验器材:齿轮、圆锥齿轮、轴、梁、手柄等
试验过程:根据搭建步骤图搭建齿轮装置模型,摇动齿轮装置的守边关,观察各齿轮的转速和转动方向。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第二节
常用的传动机械(2) 第二节
连杆传动
学生活动 活动1:
试验目的:探究曲柄摇杆的功能。
试验器材:多孔塑料杆、螺丝、螺帽
试验过程:按照图示搭建曲柄摇杆,摇动手柄使曲柄AB做圆周运动,观察摇杆CD的运动情况。
活动1:雨刮器
试验目的:掌握平面连杆装置的结构和特点,了解平面连杆机构在实际生活中的运用。
试验器材:齿轮、圆锥齿轮、轴、梁、手柄等
试验过程:根据搭建步骤图搭建雨刮器模型,摇动雨刮器模型手柄,观察与管齐的两个“雨
刮”的运动情况。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第三节
带传动
学生活动 活动1:双轴旋转装置
试验目的:理解变速运动、多级传动、转动方向等知识点,掌握带传动和齿轮传动的实际传动方式和作用。
试验器材:齿轮、滑轮、轴、梁等
试验过程:根据搭建步骤图搭建双轴旋状装置模型, 摇动双轴旋转装置的手柄,观察模型中两个转轴的转动方向和转动速度。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第四节
链传动
学生活动
活动1:独轮车
试验目的:理解变速运动在实际生活中的运用,掌握链传动的实际传动方式和作用。
试验器材:轮胎、轮毂、链条、轴、梁、手柄等
试验过程:根据搭建步骤图搭建独轮车模型,摇动独轮车的脚踏,观察车轮的运动状态。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第五节
综合实践
学生活动
活动1:机械毛毛虫
试验目的:了解齿轮传动和连杆传动的综合运用。
试验器材:轮毂、轮胎、齿轮、轴、梁、手柄等
试验过程:根据搭建步骤图搭建机械毛毛虫模型,滚动大齿轮,观察毛毛虫的运动状态。
第三章 让简易机器人完成指派任务
苏教版教材 智慧天下产品
教材内容 第二节
简易机器人的程序设计 第一节
单片机及其常用的汇编语言
指令
学生活动 活动1:控制程序的作用试验
试验目的:探究储存在单片机中的程序在简易机器人完成动作中的作用
试验器材:未储存控制器程序的控制电路主板、已经制作好的简易机器人模型。
试验过程:将已制作的简易机器人控制电路主板调换成无储存程序的同规格的控制电路主板。启动简易机器人,并观察机器人能否完成原先的动作。 活动1:交通灯
试验目的:认识单片机,掌握AT89C2051单片机汇编语言中的常见指令,学会使用控制器来控制外部设备。
试验器材:XROBOT-C1控制器、灯
试验过程:根据图搭建交通灯模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行并观察效果。
苏教版教材 智慧天下产品
教材内容 第三节
让机器人完成指派任务 第二节
编制简单的控制程序
学生活动 活动1:机械手移送乒乓球
试验目的:能设计和制作一个有单片机、电动机和传动接卸等组成的简单机器人,且能完成规定动作组成的指派任务。
试验器材:单片机、电机、乒乓球、梁等
试验过程:根据机械手移送乒乓球的任务要求,设计搭建机械手模型,并编写相应的程序,运行并调试机械手,观察机械手能否移送乒乓球。
活动1:电风扇
试验目的:知道三种基本的程序结构,能够使用条件选择结构编写简单的控制程序,并能够将程序写入(烧结)到程序存储器中。
试验器材:XROBOT-C1控制器、触动传感器、风扇
试验过程:根据搭建步骤图图搭建电风扇模型,用汇编语言编写一个简单的控制程序,使电风扇完成指定的任务,将程序下载到控制器中,并观察效果。
第三章 让简易机器人完成指派任务
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第一节
简易机器人对环境的识别 第一节
常见的传感器及其作用
学生活动 活动1:机械手识别橙色乒乓球
试验目的:知道常见的传感器及其作用
试验器材:单片机、电机、乒乓球、梁等。
试验过程:根据机械手识别橙色乒乓球的任务要求,设计搭建机械手模型,并编写相应的程序,运行并调试机械手,观察机械手能否识别橙色乒乓球。
活动1:报警器
试验目的:了解常见传感器的种类,知道常见传感器的作用。
试验器材:XROBOT-C1控制器、触动传感器、光电传感器、声音传感器
试验过程:根据搭建步骤图图搭建报警器模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行、调试,分别按下出动传感器、用手遮挡光电传感器和在声音传感器旁发出声音,观察报警器能否发出报警声。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第二节
简单控制系统
学生活动 活动1:自动门
试验目的:了解常见传感器在生活中的应用,熟练使用控制器来控制外部设备,进一步理解机器人控制系统设计的基本思想和方法。
试验器材:XROBOT-C1控制器、触动传感器、光电传感器、板、梁、电机、齿轮、蜗杆
试验过程:根据图搭建自动门模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行并观察效果,调试。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第三节 让简易机器人完成复杂的任务(选学) 第三节
步行机器人的设计和制作
学生活动 活动1:送水、倒水服务机器人
试验目的:设计一个能够实现送水和倒水服务的机器人。
试验器材:单片机、电机、水、水桶等。
试验过程:根据送水、倒水服务机器人的任务要求,设计搭建简易机器人模型,并编写相应的程序,运行并调试机器人,观察机器人能否完成送水、倒水任务。
活动1:步行机器人
试验目的:设计并搭建一个能够直立行走的机器人;机器人能够前进10s,再后退10s;机器人一直闲闲走,遇到障碍五物,后退10s后停止。
试验器材:XROBOT-C1控制器、光电传感器、板、梁、电机、齿轮等
试验过程:根据搭建步骤图搭建步行机器人模型,用汇编语言编写两个个简单的控制程序,将程序下载到控制器中,运行、调试,并观察能否达到试验目的。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第四节
碰碰车机器人的设计和制作
学生活动 活动1:碰碰车机器人
试验目的:设计并搭建一个碰碰车机器人;碰碰车机器人能往前行走,当碰到障碍物时,小车后退2s后右转弯并继续前进,再次碰到障碍物时,小车后退2s后右转弯并继续前进,一直循环下去。
试验器材:XROBOT-C1控制器、触动传感器、轮胎、轮毂、电机、梁等
试验过程:根据图搭建自动门模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行并观察效果,调试。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第五节
寻迹机器人的设计和制作
学生活动 活动1:寻迹机器人
试验目的:通过设计一个简易机器人模型,经历和熟悉简易机器人设计和制作的一般过程。
试验器材:XROBOT-C1控制器、触动传感器、光电传感器、带孔梁、齿轮、电机、连接轴等
试验过程:设计分析如何使机器人完成既定任务, 看见”黑色路径并“沿着”黑色路径走等,搭建机器人的硬件部分,用XLAB-C1汇编语言编程软件编写一个简单的控制程序,使机器人完成指定任务,如遇到障碍物停止前进或者碰到障碍物后绕过障碍物,继续前行。
三、教学使用案例
技术支持
如果您在使用产品的过程中有任何困难和需要帮助的地方,
您可以通过以下方式联系我们,以便我们为您提供技术或
产品方面的各项服务。
1 、免费服务热线: 800-810-0709
传真: 010-82825455
2 、服务电子邮箱: service@
3 、智慧天下网站: http://www.
4 、信函地址:北京市海淀区东北旺西路8号9号楼2区
209室 (100094)
5 、垂询当地经销商
谢谢!
SOLUTION
FOR HI-TECH
EDUCATION
高中《简易机器人制作》配套教学具
智慧天下产品与苏教版教材大纲高度一致
智慧天下产品全面覆盖苏教版教材内容
教学使用案例
一、与教材大纲的匹配
智慧天下《简易机器人制作》配套教学具产品与苏教版《简易机器人制作》教材大纲高度一致。
苏教版教材 智慧天下产品
第一章 走进机器人的世界
第二章 让简易机器人动起来
第三章 让简易机器人完成指派任务
第四章 让简易机器人自动适应环境
附录 主题一 机器人简介
主题二 传动机械
主题三 单片机及其控制程序
主题四 单片机与控制电路
主题五 机器人
附录
与苏教版教材大纲的比对
苏教版教材 智慧天下产品
认识机器人
机器人的基本组成与工作
过程
认识机器人
以“走进机器人的世界”章节为例
苏教版教材 智慧天下产品
常用的传动机械(1)
常用的传动机械(2)
电子控制系统
让简易机器人动起来 齿轮传动
连杆传动
带传动
链传动
综合实践
以“让简易机器人动起来”章节为例
苏教版教材 智慧天下产品
简易机器人的单片机控制电路
简易机器人的程序设计
让简易机器人完成指派任务 单片机及其常用的汇编语言指令
编制简单的控制程序
再以“让简易机器人完成指派任务”章节为例
苏教版教材 智慧天下产品
简易机器人对环境的识
别
让简易机器人自动适应
环境
让简易机器人完成复杂
的任务(选学)
常见传感器及其作用
简单控制系统
步行机器人的设计和制作
碰碰车机器人的设计和制作
寻迹机器人的设计和制作
以“让简易机器人自动适应环境”章节为例
二、与教材内容的匹配
智慧天下《简易机器人制作》配套教学具产品全面覆盖苏教版《简易机器人制作》教材的所涉内容。
第一章 走进机器人的世界
苏教版教材 智慧天下产品
教材内容 认识机器人
机器人的基本组成与工作过程 认识机器人
教学方法 通过讲述的方式使学生知道什么是机器人,机器人的应用和机器人的未来,了解机器人的基本组成与工作过程。 通过实物演示与理论讲授相结合的方式,使学生知道什么是机器人,了解机器人的基本组成与工作过程。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第一节
常用的传动机械(1) 第一节
齿轮传动
学生活动 活动1:
试验目的:通过简单齿轮箱的安装调试,了解齿轮箱的结构,探究转速和转动力矩的关系。
试验器材:模型齿轮箱、电动机、螺丝刀、电源
试验过程:组装一个由两对齿轮啮合的齿轮箱,启动电动机,观察齿轮箱的运转,改变出入电动机的电源正、负极接线,观察齿轮箱输出轴转动方向发生的变化。 活动1:齿轮装置
试验目的:了解齿轮传动有改变速度和改变方向的功能,能够计算简单的齿轮传动比,了解圆锥齿轮的传动特点。
试验器材:齿轮、圆锥齿轮、轴、梁、手柄等
试验过程:根据搭建步骤图搭建齿轮装置模型,摇动齿轮装置的守边关,观察各齿轮的转速和转动方向。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第二节
常用的传动机械(2) 第二节
连杆传动
学生活动 活动1:
试验目的:探究曲柄摇杆的功能。
试验器材:多孔塑料杆、螺丝、螺帽
试验过程:按照图示搭建曲柄摇杆,摇动手柄使曲柄AB做圆周运动,观察摇杆CD的运动情况。
活动1:雨刮器
试验目的:掌握平面连杆装置的结构和特点,了解平面连杆机构在实际生活中的运用。
试验器材:齿轮、圆锥齿轮、轴、梁、手柄等
试验过程:根据搭建步骤图搭建雨刮器模型,摇动雨刮器模型手柄,观察与管齐的两个“雨
刮”的运动情况。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第三节
带传动
学生活动 活动1:双轴旋转装置
试验目的:理解变速运动、多级传动、转动方向等知识点,掌握带传动和齿轮传动的实际传动方式和作用。
试验器材:齿轮、滑轮、轴、梁等
试验过程:根据搭建步骤图搭建双轴旋状装置模型, 摇动双轴旋转装置的手柄,观察模型中两个转轴的转动方向和转动速度。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第四节
链传动
学生活动
活动1:独轮车
试验目的:理解变速运动在实际生活中的运用,掌握链传动的实际传动方式和作用。
试验器材:轮胎、轮毂、链条、轴、梁、手柄等
试验过程:根据搭建步骤图搭建独轮车模型,摇动独轮车的脚踏,观察车轮的运动状态。
第二章 让简易机器人动起来
苏教版教材 智慧天下产品
教材内容 第五节
综合实践
学生活动
活动1:机械毛毛虫
试验目的:了解齿轮传动和连杆传动的综合运用。
试验器材:轮毂、轮胎、齿轮、轴、梁、手柄等
试验过程:根据搭建步骤图搭建机械毛毛虫模型,滚动大齿轮,观察毛毛虫的运动状态。
第三章 让简易机器人完成指派任务
苏教版教材 智慧天下产品
教材内容 第二节
简易机器人的程序设计 第一节
单片机及其常用的汇编语言
指令
学生活动 活动1:控制程序的作用试验
试验目的:探究储存在单片机中的程序在简易机器人完成动作中的作用
试验器材:未储存控制器程序的控制电路主板、已经制作好的简易机器人模型。
试验过程:将已制作的简易机器人控制电路主板调换成无储存程序的同规格的控制电路主板。启动简易机器人,并观察机器人能否完成原先的动作。 活动1:交通灯
试验目的:认识单片机,掌握AT89C2051单片机汇编语言中的常见指令,学会使用控制器来控制外部设备。
试验器材:XROBOT-C1控制器、灯
试验过程:根据图搭建交通灯模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行并观察效果。
苏教版教材 智慧天下产品
教材内容 第三节
让机器人完成指派任务 第二节
编制简单的控制程序
学生活动 活动1:机械手移送乒乓球
试验目的:能设计和制作一个有单片机、电动机和传动接卸等组成的简单机器人,且能完成规定动作组成的指派任务。
试验器材:单片机、电机、乒乓球、梁等
试验过程:根据机械手移送乒乓球的任务要求,设计搭建机械手模型,并编写相应的程序,运行并调试机械手,观察机械手能否移送乒乓球。
活动1:电风扇
试验目的:知道三种基本的程序结构,能够使用条件选择结构编写简单的控制程序,并能够将程序写入(烧结)到程序存储器中。
试验器材:XROBOT-C1控制器、触动传感器、风扇
试验过程:根据搭建步骤图图搭建电风扇模型,用汇编语言编写一个简单的控制程序,使电风扇完成指定的任务,将程序下载到控制器中,并观察效果。
第三章 让简易机器人完成指派任务
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第一节
简易机器人对环境的识别 第一节
常见的传感器及其作用
学生活动 活动1:机械手识别橙色乒乓球
试验目的:知道常见的传感器及其作用
试验器材:单片机、电机、乒乓球、梁等。
试验过程:根据机械手识别橙色乒乓球的任务要求,设计搭建机械手模型,并编写相应的程序,运行并调试机械手,观察机械手能否识别橙色乒乓球。
活动1:报警器
试验目的:了解常见传感器的种类,知道常见传感器的作用。
试验器材:XROBOT-C1控制器、触动传感器、光电传感器、声音传感器
试验过程:根据搭建步骤图图搭建报警器模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行、调试,分别按下出动传感器、用手遮挡光电传感器和在声音传感器旁发出声音,观察报警器能否发出报警声。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第二节
简单控制系统
学生活动 活动1:自动门
试验目的:了解常见传感器在生活中的应用,熟练使用控制器来控制外部设备,进一步理解机器人控制系统设计的基本思想和方法。
试验器材:XROBOT-C1控制器、触动传感器、光电传感器、板、梁、电机、齿轮、蜗杆
试验过程:根据图搭建自动门模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行并观察效果,调试。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第三节 让简易机器人完成复杂的任务(选学) 第三节
步行机器人的设计和制作
学生活动 活动1:送水、倒水服务机器人
试验目的:设计一个能够实现送水和倒水服务的机器人。
试验器材:单片机、电机、水、水桶等。
试验过程:根据送水、倒水服务机器人的任务要求,设计搭建简易机器人模型,并编写相应的程序,运行并调试机器人,观察机器人能否完成送水、倒水任务。
活动1:步行机器人
试验目的:设计并搭建一个能够直立行走的机器人;机器人能够前进10s,再后退10s;机器人一直闲闲走,遇到障碍五物,后退10s后停止。
试验器材:XROBOT-C1控制器、光电传感器、板、梁、电机、齿轮等
试验过程:根据搭建步骤图搭建步行机器人模型,用汇编语言编写两个个简单的控制程序,将程序下载到控制器中,运行、调试,并观察能否达到试验目的。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第四节
碰碰车机器人的设计和制作
学生活动 活动1:碰碰车机器人
试验目的:设计并搭建一个碰碰车机器人;碰碰车机器人能往前行走,当碰到障碍物时,小车后退2s后右转弯并继续前进,再次碰到障碍物时,小车后退2s后右转弯并继续前进,一直循环下去。
试验器材:XROBOT-C1控制器、触动传感器、轮胎、轮毂、电机、梁等
试验过程:根据图搭建自动门模型,用汇编语言编写一个简单的控制程序,将程序下载到控制器中,运行并观察效果,调试。
第四章 让机器人自动适应环境
苏教版教材 智慧天下产品
教材内容 第五节
寻迹机器人的设计和制作
学生活动 活动1:寻迹机器人
试验目的:通过设计一个简易机器人模型,经历和熟悉简易机器人设计和制作的一般过程。
试验器材:XROBOT-C1控制器、触动传感器、光电传感器、带孔梁、齿轮、电机、连接轴等
试验过程:设计分析如何使机器人完成既定任务, 看见”黑色路径并“沿着”黑色路径走等,搭建机器人的硬件部分,用XLAB-C1汇编语言编程软件编写一个简单的控制程序,使机器人完成指定任务,如遇到障碍物停止前进或者碰到障碍物后绕过障碍物,继续前行。
三、教学使用案例
技术支持
如果您在使用产品的过程中有任何困难和需要帮助的地方,
您可以通过以下方式联系我们,以便我们为您提供技术或
产品方面的各项服务。
1 、免费服务热线: 800-810-0709
传真: 010-82825455
2 、服务电子邮箱: service@
3 、智慧天下网站: http://www.
4 、信函地址:北京市海淀区东北旺西路8号9号楼2区
209室 (100094)
5 、垂询当地经销商
谢谢!
同课章节目录