跨滑轮绳连接物体系的牛顿第二定律
图片预览
文档简介
跨滑轮绳连接物体系的牛顿第二定律
一、问题的缘起
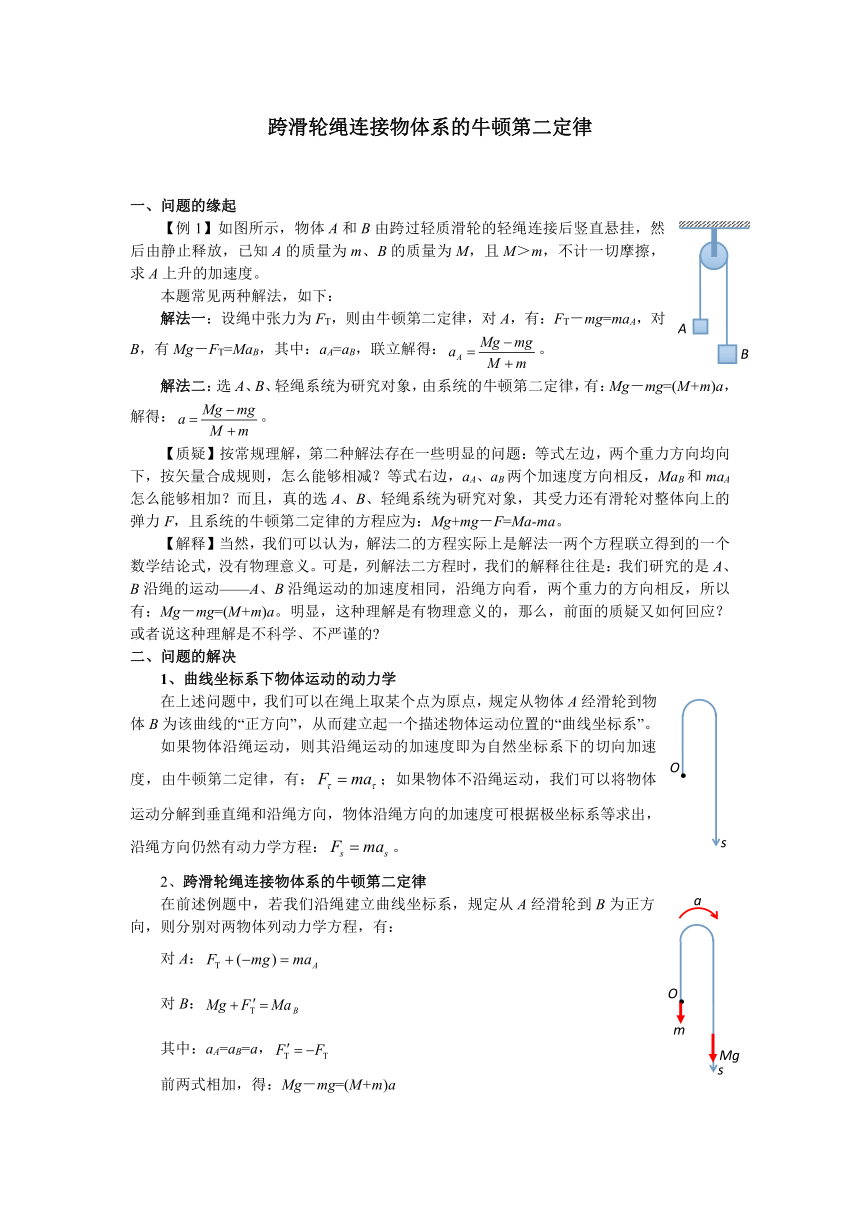
【例 1】如图所示,物体 A和 B由跨过轻质滑轮的轻绳连接后竖直悬挂,然
后由静止释放,已知 A的质量为 m、B的质量为 M,且 M>m,不计一切摩擦,
求 A上升的加速度。
本题常见两种解法,如下:
解法一:设绳中张力为 FT,则由牛顿第二定律,对 A,有:FT-mg=maA,对 A
B,有 Mg-F =Ma ,其中:a =a ,联立解得: a Mg ?mgT B A B ? 。A M ?m B
解法二:选 A、B、轻绳系统为研究对象,由系统的牛顿第二定律,有:Mg-mg=(M+m)a,
解得: a Mg ?mg? 。
M ?m
【质疑】按常规理解,第二种解法存在一些明显的问题:等式左边,两个重力方向均向
下,按矢量合成规则,怎么能够相减?等式右边,aA、aB两个加速度方向相反,MaB和 maA
怎么能够相加?而且,真的选 A、B、轻绳系统为研究对象,其受力还有滑轮对整体向上的
弹力 F,且系统的牛顿第二定律的方程应为:Mg+mg-F=Ma-ma。
【解释】当然,我们可以认为,解法二的方程实际上是解法一两个方程联立得到的一个
数学结论式,没有物理意义。可是,列解法二方程时,我们的解释往往是:我们研究的是 A、
B沿绳的运动——A、B沿绳运动的加速度相同,沿绳方向看,两个重力的方向相反,所以
有:Mg-mg=(M+m)a。明显,这种理解是有物理意义的,那么,前面的质疑又如何回应?
或者说这种理解是不科学、不严谨的?
二、问题的解决
1、曲线坐标系下物体运动的动力学
在上述问题中,我们可以在绳上取某个点为原点,规定从物体 A经滑轮到物
体 B为该曲线的“正方向”,从而建立起一个描述物体运动位置的“曲线坐标系”。
如果物体沿绳运动,则其沿绳运动的加速度即为自然坐标系下的切向加速
O
度,由牛顿第二定律,有: F? ? ma? ;如果物体不沿绳运动,我们可以将物体 ·
运动分解到垂直绳和沿绳方向,物体沿绳方向的加速度可根据极坐标系等求出,
沿绳方向仍然有动力学方程: Fs ? mas 。 s
2、跨滑轮绳连接物体系的牛顿第二定律
在前述例题中,若我们沿绳建立曲线坐标系,规定从 A经滑轮到 B为正方 a
向,则分别对两物体列动力学方程,有:
对 A: FT ? (?mg) ? maA
O
对 B:Mg ? FT? ?Ma B ·
m
其中:aA=aB=a, FT? ? ?FT Mg
s
前两式相加,得:Mg-mg=(M+m)a
此式即为 A、B、轻绳系统在曲线坐标系下的牛顿第二定律方程,其理解就是:B均沿
绳的运动——沿绳方向看,A、B沿绳运动的加速度相同,两个重力的方向相反,所以有:
Mg-mg=(M+m)a
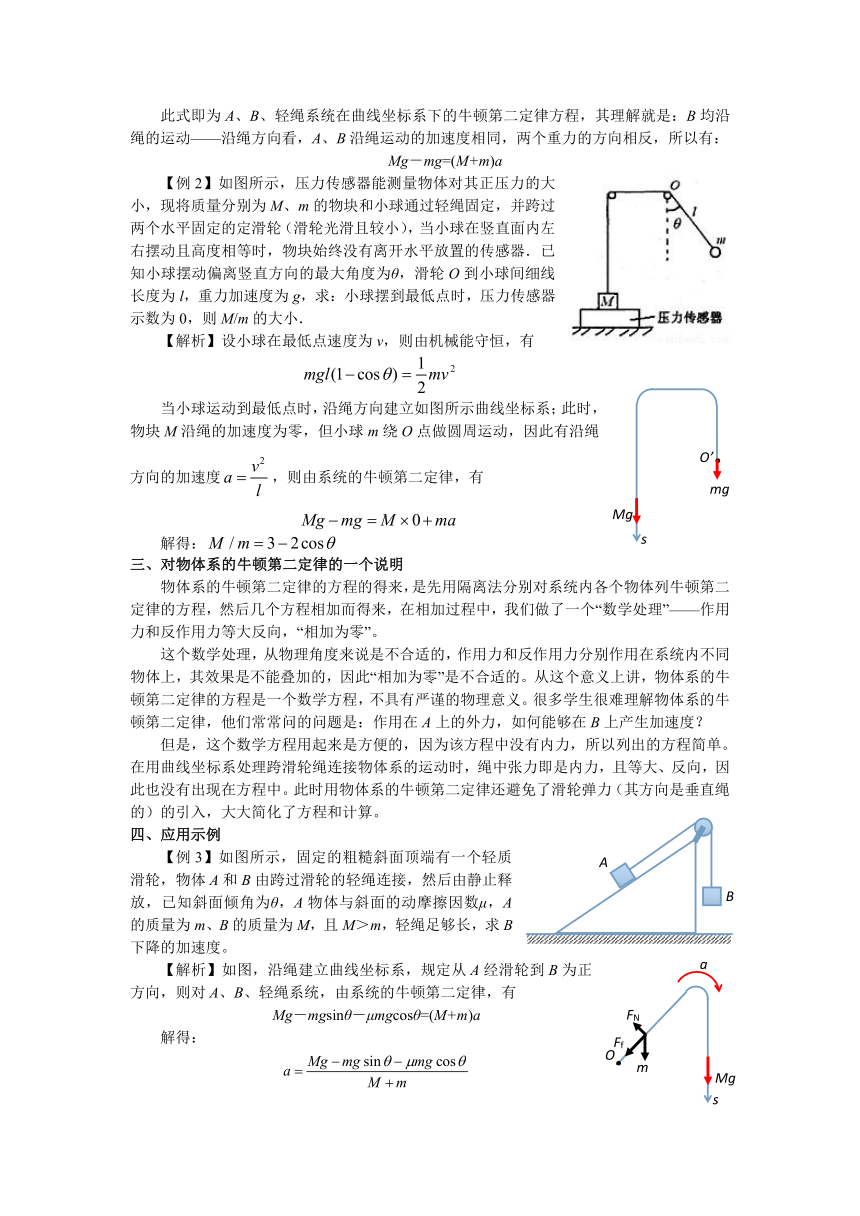
【例 2】如图所示,压力传感器能测量物体对其正压力的大
小,现将质量分别为 M、m的物块和小球通过轻绳固定,并跨过
两个水平固定的定滑轮(滑轮光滑且较小),当小球在竖直面内左
右摆动且高度相等时,物块始终没有离开水平放置的传感器.已
知小球摆动偏离竖直方向的最大角度为θ,滑轮 O到小球间细线
长度为 l,重力加速度为 g,求:小球摆到最低点时,压力传感器
示数为 0,则 M/m的大小.
【解析】设小球在最低点速度为 v,则由机械能守恒,有
mgl(1? cos? ) 1? mv 2
2
当小球运动到最低点时,沿绳方向建立如图所示曲线坐标系;此时,
物块 M沿绳的加速度为零,但小球 m绕 O点做圆周运动,因此有沿绳
v2 O·’
方向的加速度 a ? ,则由系统的牛顿第二定律,有
l mg
Mg ?mg ?M ? 0?ma Mg
解得:M /m ? 3? 2cos? s
三、对物体系的牛顿第二定律的一个说明
物体系的牛顿第二定律的方程的得来,是先用隔离法分别对系统内各个物体列牛顿第二
定律的方程,然后几个方程相加而得来,在相加过程中,我们做了一个“数学处理”——作用
力和反作用力等大反向,“相加为零”。
这个数学处理,从物理角度来说是不合适的,作用力和反作用力分别作用在系统内不同
物体上,其效果是不能叠加的,因此“相加为零”是不合适的。从这个意义上讲,物体系的牛
顿第二定律的方程是一个数学方程,不具有严谨的物理意义。很多学生很难理解物体系的牛
顿第二定律,他们常常问的问题是:作用在 A上的外力,如何能够在 B上产生加速度?
但是,这个数学方程用起来是方便的,因为该方程中没有内力,所以列出的方程简单。
在用曲线坐标系处理跨滑轮绳连接物体系的运动时,绳中张力即是内力,且等大、反向,因
此也没有出现在方程中。此时用物体系的牛顿第二定律还避免了滑轮弹力(其方向是垂直绳
的)的引入,大大简化了方程和计算。
四、应用示例
【例 3】如图所示,固定的粗糙斜面顶端有一个轻质 A
滑轮,物体 A和 B由跨过滑轮的轻绳连接,然后由静止释
放,已知斜面倾角为θ,A物体与斜面的动摩擦因数μ,A B
的质量为 m、B的质量为 M,且 M>m,轻绳足够长,求 B
下降的加速度。
【解析】如图,沿绳建立曲线坐标系,规定从 A经滑轮到 B为正 a
方向,则对 A、B、轻绳系统,由系统的牛顿第二定律,有
Mg-mgsinθ-μmgcosθ=(M+m)a FN
解得: Ff
a Mg ?mg sin? ? ?mg cos?
O
? · m
M ?m Mg
s
【例 4】如图所示,质量为 m的物体 A静止放在光滑水平地面上,跨过等高的两个轻
质小滑轮的轻绳将其与质量为 M=2m的物体 B连接。已知两小滑轮到地面高度 h,开始时绳
o
与水平方向夹角为? ? 30 ,现由静止释放 A、B,此后运动过程中,A一直未离开地面。试
求:
(1)刚释放瞬间 B的加速度;
h B
(2)B下降 时,B的加速度。 h
3 A
α
【解析】整个运动过程中,A的加速度均沿水平方向向右。当 A向右的速度为 v、绳与
水平方向夹角为θ时,如图,以左边滑轮 O为参考点建立极坐标系,将 A的运动分解到垂直、
沿绳方向,则 A沿绳方向的加速度表达式为:
a (dvn v d?n ? ? ? )r?
O
dt dt
dv? d? ? l Ba? ? ( ? vn )?dt dt vn hA an aB
标量化,得 θ aA v
a dv
2 aτ
? n
v? a dv v? , ? ? ? v ?n vτdt l ? dt n l
而且有: a? ? an tan
dv
? , a ? nB dt
(1)刚释放瞬间,A速度为零,则有an1 ? aB1。建立如图所示曲线坐标系,则由牛顿
第二定律,有
Mg ? FN1 sin? ?mg sin? ? (M ?m)a n1 FN1
Mg
α
mg cos? ?FN1 cos? ?ma O’· s?1
mg
其中: a?1 ? an1 tan?
M
联立解得: aB1 ? g ? 0.6gM ?m(1? tan 2?)
h
(2)当 B下降 时,设 A、B的速度分别为 vA、vB,则有:
3
vB ? vn ? vA cos ? , v? ? vA sin ?
h h h h
,其中: ? ? , l ?
3 sin? sin ? sin ?
dv v2
此时,对 A,有: an2 ? n ? ? ,且 a? 2 ? an2 tan
dv
? , a n
dt l B2
?
dt
建立如图所示曲线坐标系,则由牛顿第二定律,有
Mg ? FN2 sin ? ?mg sin ? ?Ma B2 ?ma n2 FN2
β Mg
mg cos ? ?FN2 cos ? ?ma? 2 O’·
mg s
由机械能守恒,有
Mg h 1mv 2 1? ? Mv 2
3 2 A 2 B
2Mg sin3Mg ??
3(m ?M cos2 ?)
联立解得: aB2 ? ? 0.597gM ?m(1? tan 2 ? )
一、问题的缘起
【例 1】如图所示,物体 A和 B由跨过轻质滑轮的轻绳连接后竖直悬挂,然
后由静止释放,已知 A的质量为 m、B的质量为 M,且 M>m,不计一切摩擦,
求 A上升的加速度。
本题常见两种解法,如下:
解法一:设绳中张力为 FT,则由牛顿第二定律,对 A,有:FT-mg=maA,对 A
B,有 Mg-F =Ma ,其中:a =a ,联立解得: a Mg ?mgT B A B ? 。A M ?m B
解法二:选 A、B、轻绳系统为研究对象,由系统的牛顿第二定律,有:Mg-mg=(M+m)a,
解得: a Mg ?mg? 。
M ?m
【质疑】按常规理解,第二种解法存在一些明显的问题:等式左边,两个重力方向均向
下,按矢量合成规则,怎么能够相减?等式右边,aA、aB两个加速度方向相反,MaB和 maA
怎么能够相加?而且,真的选 A、B、轻绳系统为研究对象,其受力还有滑轮对整体向上的
弹力 F,且系统的牛顿第二定律的方程应为:Mg+mg-F=Ma-ma。
【解释】当然,我们可以认为,解法二的方程实际上是解法一两个方程联立得到的一个
数学结论式,没有物理意义。可是,列解法二方程时,我们的解释往往是:我们研究的是 A、
B沿绳的运动——A、B沿绳运动的加速度相同,沿绳方向看,两个重力的方向相反,所以
有:Mg-mg=(M+m)a。明显,这种理解是有物理意义的,那么,前面的质疑又如何回应?
或者说这种理解是不科学、不严谨的?
二、问题的解决
1、曲线坐标系下物体运动的动力学
在上述问题中,我们可以在绳上取某个点为原点,规定从物体 A经滑轮到物
体 B为该曲线的“正方向”,从而建立起一个描述物体运动位置的“曲线坐标系”。
如果物体沿绳运动,则其沿绳运动的加速度即为自然坐标系下的切向加速
O
度,由牛顿第二定律,有: F? ? ma? ;如果物体不沿绳运动,我们可以将物体 ·
运动分解到垂直绳和沿绳方向,物体沿绳方向的加速度可根据极坐标系等求出,
沿绳方向仍然有动力学方程: Fs ? mas 。 s
2、跨滑轮绳连接物体系的牛顿第二定律
在前述例题中,若我们沿绳建立曲线坐标系,规定从 A经滑轮到 B为正方 a
向,则分别对两物体列动力学方程,有:
对 A: FT ? (?mg) ? maA
O
对 B:Mg ? FT? ?Ma B ·
m
其中:aA=aB=a, FT? ? ?FT Mg
s
前两式相加,得:Mg-mg=(M+m)a
此式即为 A、B、轻绳系统在曲线坐标系下的牛顿第二定律方程,其理解就是:B均沿
绳的运动——沿绳方向看,A、B沿绳运动的加速度相同,两个重力的方向相反,所以有:
Mg-mg=(M+m)a
【例 2】如图所示,压力传感器能测量物体对其正压力的大
小,现将质量分别为 M、m的物块和小球通过轻绳固定,并跨过
两个水平固定的定滑轮(滑轮光滑且较小),当小球在竖直面内左
右摆动且高度相等时,物块始终没有离开水平放置的传感器.已
知小球摆动偏离竖直方向的最大角度为θ,滑轮 O到小球间细线
长度为 l,重力加速度为 g,求:小球摆到最低点时,压力传感器
示数为 0,则 M/m的大小.
【解析】设小球在最低点速度为 v,则由机械能守恒,有
mgl(1? cos? ) 1? mv 2
2
当小球运动到最低点时,沿绳方向建立如图所示曲线坐标系;此时,
物块 M沿绳的加速度为零,但小球 m绕 O点做圆周运动,因此有沿绳
v2 O·’
方向的加速度 a ? ,则由系统的牛顿第二定律,有
l mg
Mg ?mg ?M ? 0?ma Mg
解得:M /m ? 3? 2cos? s
三、对物体系的牛顿第二定律的一个说明
物体系的牛顿第二定律的方程的得来,是先用隔离法分别对系统内各个物体列牛顿第二
定律的方程,然后几个方程相加而得来,在相加过程中,我们做了一个“数学处理”——作用
力和反作用力等大反向,“相加为零”。
这个数学处理,从物理角度来说是不合适的,作用力和反作用力分别作用在系统内不同
物体上,其效果是不能叠加的,因此“相加为零”是不合适的。从这个意义上讲,物体系的牛
顿第二定律的方程是一个数学方程,不具有严谨的物理意义。很多学生很难理解物体系的牛
顿第二定律,他们常常问的问题是:作用在 A上的外力,如何能够在 B上产生加速度?
但是,这个数学方程用起来是方便的,因为该方程中没有内力,所以列出的方程简单。
在用曲线坐标系处理跨滑轮绳连接物体系的运动时,绳中张力即是内力,且等大、反向,因
此也没有出现在方程中。此时用物体系的牛顿第二定律还避免了滑轮弹力(其方向是垂直绳
的)的引入,大大简化了方程和计算。
四、应用示例
【例 3】如图所示,固定的粗糙斜面顶端有一个轻质 A
滑轮,物体 A和 B由跨过滑轮的轻绳连接,然后由静止释
放,已知斜面倾角为θ,A物体与斜面的动摩擦因数μ,A B
的质量为 m、B的质量为 M,且 M>m,轻绳足够长,求 B
下降的加速度。
【解析】如图,沿绳建立曲线坐标系,规定从 A经滑轮到 B为正 a
方向,则对 A、B、轻绳系统,由系统的牛顿第二定律,有
Mg-mgsinθ-μmgcosθ=(M+m)a FN
解得: Ff
a Mg ?mg sin? ? ?mg cos?
O
? · m
M ?m Mg
s
【例 4】如图所示,质量为 m的物体 A静止放在光滑水平地面上,跨过等高的两个轻
质小滑轮的轻绳将其与质量为 M=2m的物体 B连接。已知两小滑轮到地面高度 h,开始时绳
o
与水平方向夹角为? ? 30 ,现由静止释放 A、B,此后运动过程中,A一直未离开地面。试
求:
(1)刚释放瞬间 B的加速度;
h B
(2)B下降 时,B的加速度。 h
3 A
α
【解析】整个运动过程中,A的加速度均沿水平方向向右。当 A向右的速度为 v、绳与
水平方向夹角为θ时,如图,以左边滑轮 O为参考点建立极坐标系,将 A的运动分解到垂直、
沿绳方向,则 A沿绳方向的加速度表达式为:
a (dvn v d?n ? ? ? )r?
O
dt dt
dv? d? ? l Ba? ? ( ? vn )?dt dt vn hA an aB
标量化,得 θ aA v
a dv
2 aτ
? n
v? a dv v? , ? ? ? v ?n vτdt l ? dt n l
而且有: a? ? an tan
dv
? , a ? nB dt
(1)刚释放瞬间,A速度为零,则有an1 ? aB1。建立如图所示曲线坐标系,则由牛顿
第二定律,有
Mg ? FN1 sin? ?mg sin? ? (M ?m)a n1 FN1
Mg
α
mg cos? ?FN1 cos? ?ma O’· s?1
mg
其中: a?1 ? an1 tan?
M
联立解得: aB1 ? g ? 0.6gM ?m(1? tan 2?)
h
(2)当 B下降 时,设 A、B的速度分别为 vA、vB,则有:
3
vB ? vn ? vA cos ? , v? ? vA sin ?
h h h h
,其中: ? ? , l ?
3 sin? sin ? sin ?
dv v2
此时,对 A,有: an2 ? n ? ? ,且 a? 2 ? an2 tan
dv
? , a n
dt l B2
?
dt
建立如图所示曲线坐标系,则由牛顿第二定律,有
Mg ? FN2 sin ? ?mg sin ? ?Ma B2 ?ma n2 FN2
β Mg
mg cos ? ?FN2 cos ? ?ma? 2 O’·
mg s
由机械能守恒,有
Mg h 1mv 2 1? ? Mv 2
3 2 A 2 B
2Mg sin3Mg ??
3(m ?M cos2 ?)
联立解得: aB2 ? ? 0.597gM ?m(1? tan 2 ? )
同课章节目录