2019-2020学年高中物理沪科版必修2:3.1探究动能变化跟做功的关系 课时作业1(含解析)
文档属性
| 名称 | 2019-2020学年高中物理沪科版必修2:3.1探究动能变化跟做功的关系 课时作业1(含解析) |
|
|
| 格式 | zip | ||
| 文件大小 | 665.1KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2020-06-22 00:00:00 | ||
图片预览
文档简介
3.1探究动能变化跟做功的关系
课时作业(含解析)
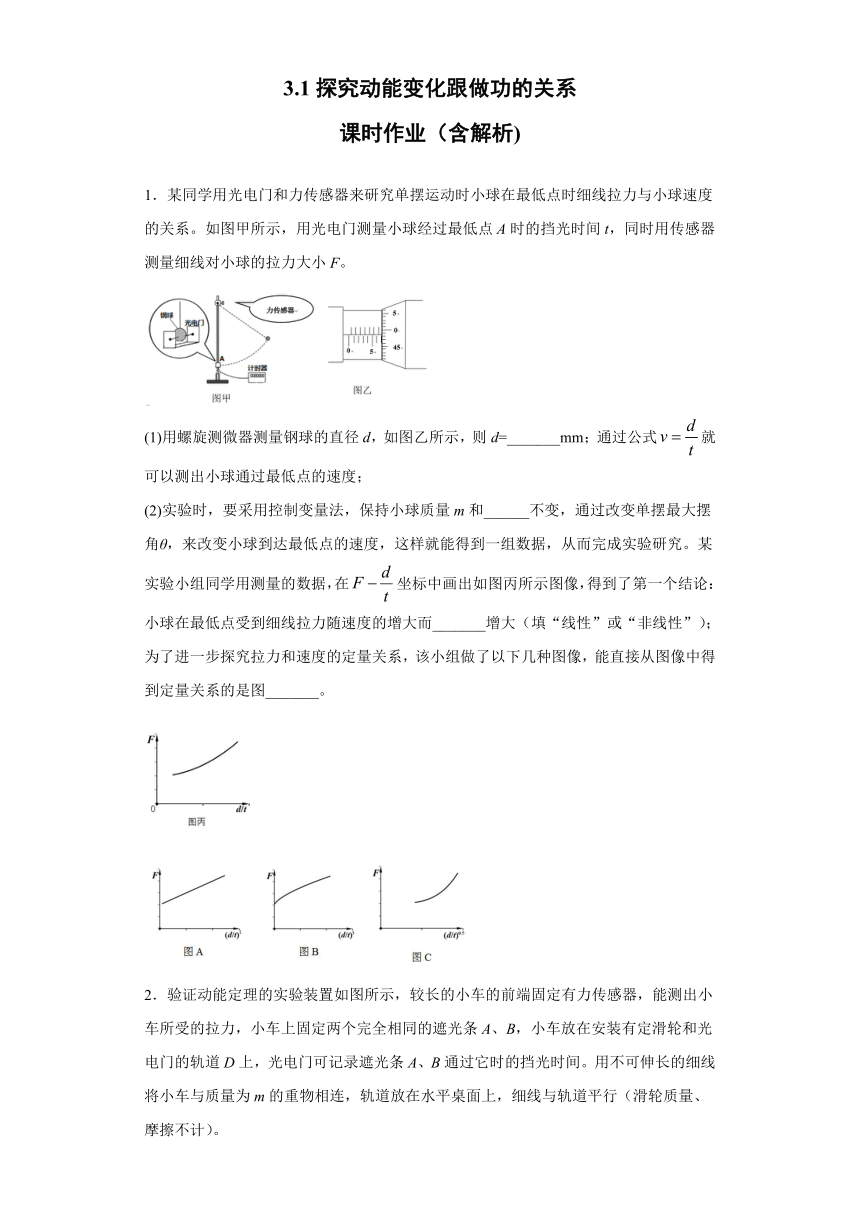
1.某同学用光电门和力传感器来研究单摆运动时小球在最低点时细线拉力与小球速度的关系。如图甲所示,用光电门测量小球经过最低点A时的挡光时间t,同时用传感器测量细线对小球的拉力大小F。
(1)用螺旋测微器测量钢球的直径d,如图乙所示,则d=_______mm;通过公式就可以测出小球通过最低点的速度;
(2)实验时,要采用控制变量法,保持小球质量m和______不变,通过改变单摆最大摆角θ,来改变小球到达最低点的速度,这样就能得到一组数据,从而完成实验研究。某实验小组同学用测量的数据,在坐标中画出如图丙所示图像,得到了第一个结论:小球在最低点受到细线拉力随速度的增大而_______增大(填“线性”或“非线性”);为了进一步探究拉力和速度的定量关系,该小组做了以下几种图像,能直接从图像中得到定量关系的是图_______。
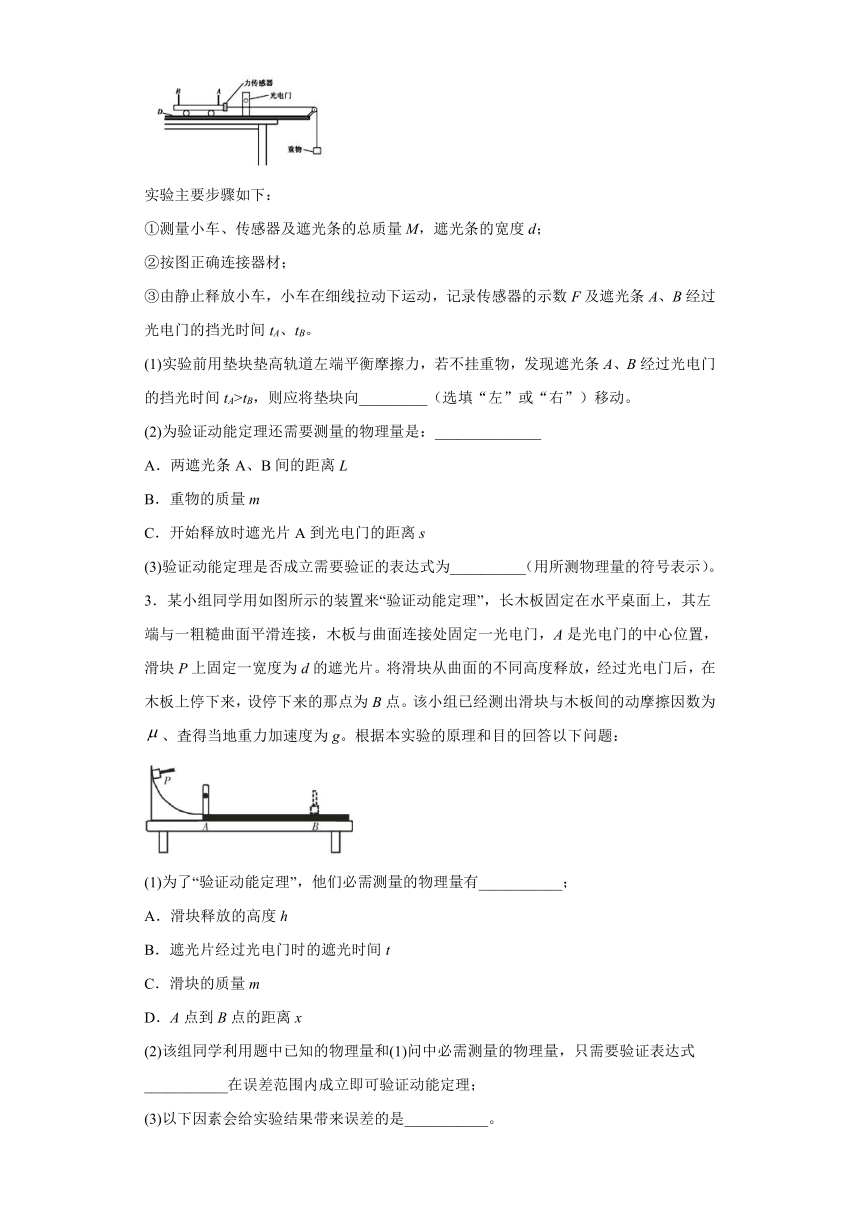
2.验证动能定理的实验装置如图所示,较长的小车的前端固定有力传感器,能测出小车所受的拉力,小车上固定两个完全相同的遮光条A、B,小车放在安装有定滑轮和光电门的轨道D上,光电门可记录遮光条A、B通过它时的挡光时间。用不可伸长的细线将小车与质量为m的重物相连,轨道放在水平桌面上,细线与轨道平行(滑轮质量、摩擦不计)。
实验主要步骤如下:
①测量小车、传感器及遮光条的总质量M,遮光条的宽度d;
②按图正确连接器材;
③由静止释放小车,小车在细线拉动下运动,记录传感器的示数F及遮光条A、B?经过光电门的挡光时间tA、tB。
(1)实验前用垫块垫高轨道左端平衡摩擦力,若不挂重物,发现遮光条A、B?经过光电门的挡光时间tA>tB,则应将垫块向_________(选填“左”或“右”)移动。
(2)为验证动能定理还需要测量的物理量是:______________
A.两遮光条A、B间的距离L
B.重物的质量m
C.开始释放时遮光片A到光电门的距离s
(3)验证动能定理是否成立需要验证的表达式为__________(用所测物理量的符号表示)。
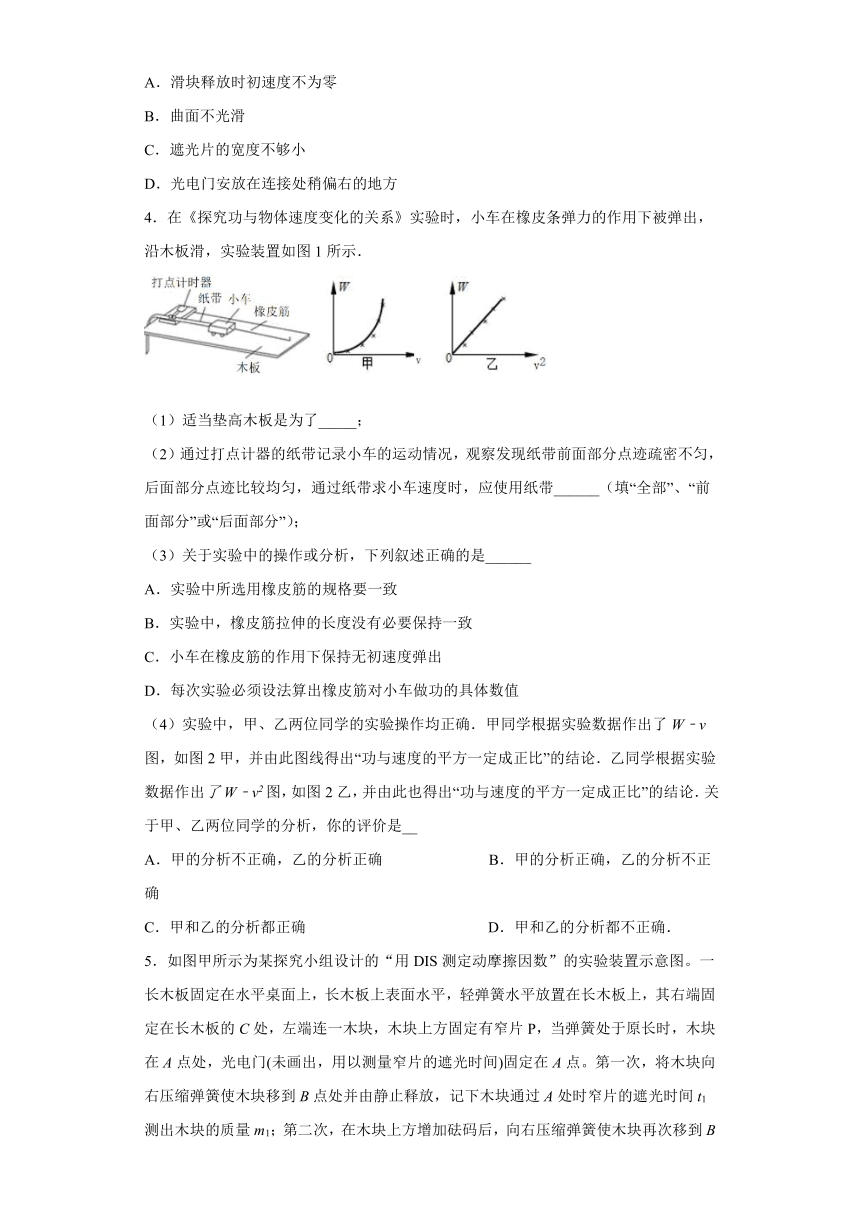
3.某小组同学用如图所示的装置来“验证动能定理”,长木板固定在水平桌面上,其左端与一粗糙曲面平滑连接,木板与曲面连接处固定一光电门,A是光电门的中心位置,滑块P上固定一宽度为d的遮光片。将滑块从曲面的不同高度释放,经过光电门后,在木板上停下来,设停下来的那点为B点。该小组已经测出滑块与木板间的动摩擦因数为、査得当地重力加速度为g。根据本实验的原理和目的回答以下问题:
(1)为了“验证动能定理”,他们必需测量的物理量有___________;
A.滑块释放的高度h
B.遮光片经过光电门时的遮光时间t
C.滑块的质量m
D.A点到B点的距离x
(2)该组同学利用题中已知的物理量和(1)问中必需测量的物理量,只需要验证表达式___________在误差范围内成立即可验证动能定理;
(3)以下因素会给实验结果带来误差的是___________。
A.滑块释放时初速度不为零
B.曲面不光滑
C.遮光片的宽度不够小
D.光电门安放在连接处稍偏右的地方
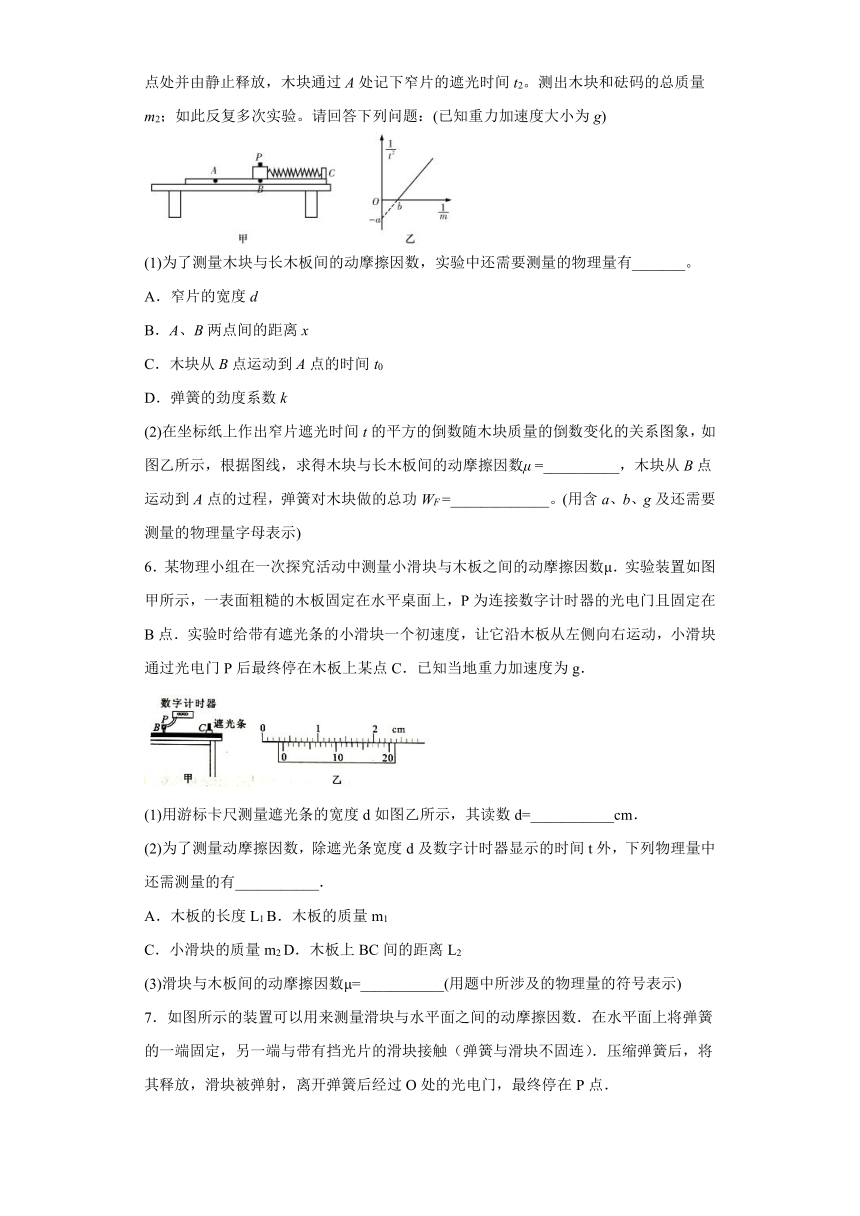
4.在《探究功与物体速度变化的关系》实验时,小车在橡皮条弹力的作用下被弹出,沿木板滑,实验装置如图1所示.
(1)适当垫高木板是为了_____;
(2)通过打点计器的纸带记录小车的运动情况,观察发现纸带前面部分点迹疏密不匀,后面部分点迹比较均匀,通过纸带求小车速度时,应使用纸带______(填“全部”、“前面部分”或“后面部分”);
(3)关于实验中的操作或分析,下列叙述正确的是______
A.实验中所选用橡皮筋的规格要一致
B.实验中,橡皮筋拉伸的长度没有必要保持一致
C.小车在橡皮筋的作用下保持无初速度弹出
D.每次实验必须设法算出橡皮筋对小车做功的具体数值
(4)实验中,甲、乙两位同学的实验操作均正确.甲同学根据实验数据作出了W﹣v图,如图2甲,并由此图线得出“功与速度的平方一定成正比”的结论.乙同学根据实验数据作出了W﹣v2图,如图2乙,并由此也得出“功与速度的平方一定成正比”的结论.关于甲、乙两位同学的分析,你的评价是__
A.甲的分析不正确,乙的分析正确
B.甲的分析正确,乙的分析不正确
C.甲和乙的分析都正确
D.甲和乙的分析都不正确.
5.如图甲所示为某探究小组设计的“用DIS测定动摩擦因数”的实验装置示意图。一长木板固定在水平桌面上,长木板上表面水平,轻弹簧水平放置在长木板上,其右端固定在长木板的C处,左端连一木块,木块上方固定有窄片P,当弹簧处于原长时,木块在A点处,光电门(未画出,用以测量窄片的遮光时间)固定在A点。第一次,将木块向右压缩弹簧使木块移到B点处并由静止释放,记下木块通过A处时窄片的遮光时间t1测出木块的质量m1;第二次,在木块上方增加砝码后,向右压缩弹簧使木块再次移到B点处并由静止释放,木块通过A处记下窄片的遮光时间t2。测出木块和砝码的总质量m2;如此反复多次实验。请回答下列问题:(已知重力加速度大小为g)
(1)为了测量木块与长木板间的动摩擦因数,实验中还需要测量的物理量有_______。
A.窄片的宽度d
B.A、B两点间的距离x
C.木块从B点运动到A点的时间t0
D.弹簧的劲度系数k
(2)在坐标纸上作出窄片遮光时间t的平方的倒数随木块质量的倒数变化的关系图象,如图乙所示,根据图线,求得木块与长木板间的动摩擦因数μ
=__________,木块从B点运动到A点的过程,弹簧对木块做的总功WF
=_____________。(用含a、b、g及还需要测量的物理量字母表示)
6.某物理小组在一次探究活动中测量小滑块与木板之间的动摩擦因数μ.实验装置如图甲所示,一表面粗糙的木板固定在水平桌面上,P为连接数字计时器的光电门且固定在B点.实验时给带有遮光条的小滑块一个初速度,让它沿木板从左侧向右运动,小滑块通过光电门P后最终停在木板上某点C.已知当地重力加速度为g.
(1)用游标卡尺测量遮光条的宽度d如图乙所示,其读数d=___________cm.
(2)为了测量动摩擦因数,除遮光条宽度d及数字计时器显示的时间t外,下列物理量中还需测量的有___________.
A.木板的长度L1
B.木板的质量m1
C.小滑块的质量m2
D.木板上BC间的距离L2
(3)滑块与木板间的动摩擦因数μ=___________(用题中所涉及的物理量的符号表示)
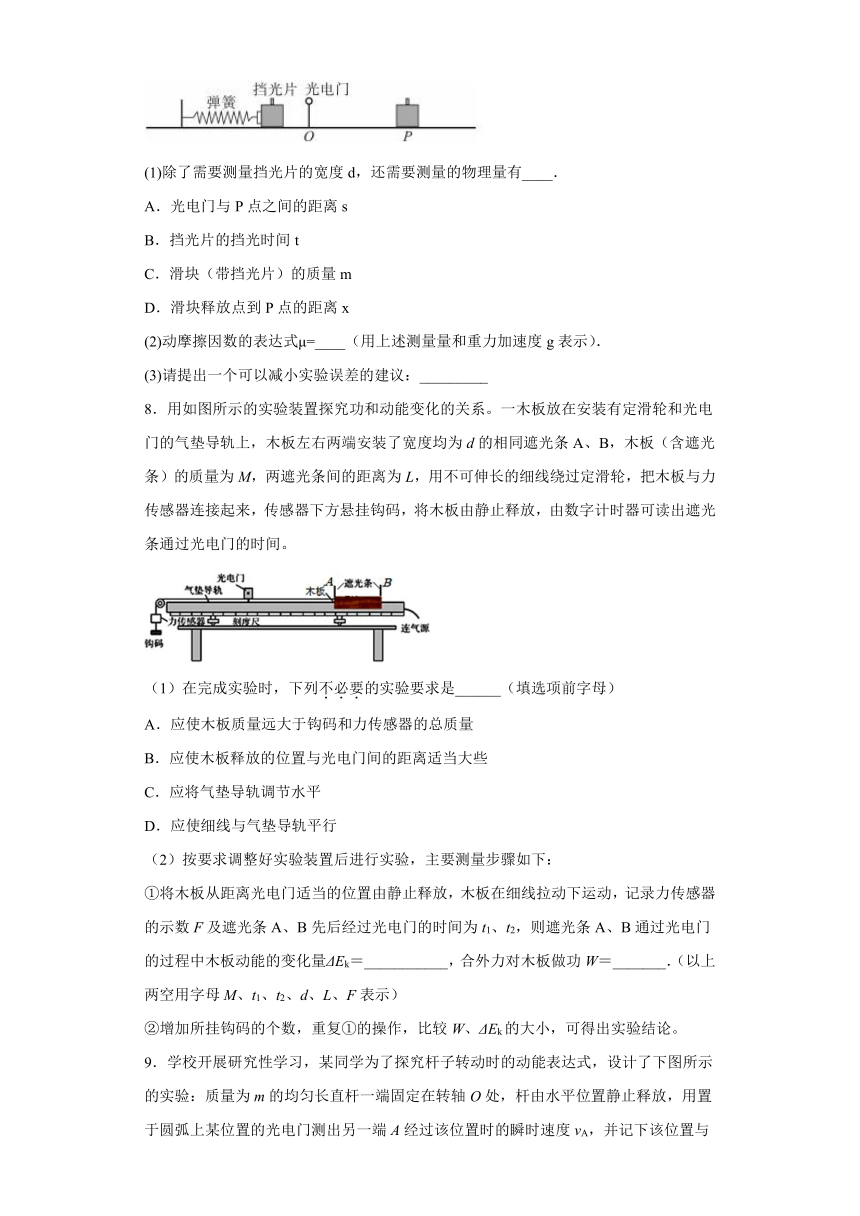
7.如图所示的装置可以用来测量滑块与水平面之间的动摩擦因数.在水平面上将弹簧的一端固定,另一端与带有挡光片的滑块接触(弹簧与滑块不固连).压缩弹簧后,将其释放,滑块被弹射,离开弹簧后经过O处的光电门,最终停在P点.
(1)除了需要测量挡光片的宽度d,还需要测量的物理量有____.
A.光电门与P点之间的距离s
B.挡光片的挡光时间t
C.滑块(带挡光片)的质量m
D.滑块释放点到P点的距离x
(2)动摩擦因数的表达式μ=____(用上述测量量和重力加速度g表示).
(3)请提出一个可以减小实验误差的建议:_________
8.用如图所示的实验装置探究功和动能变化的关系。一木板放在安装有定滑轮和光电门的气垫导轨上,木板左右两端安装了宽度均为d的相同遮光条A、B,木板(含遮光条)的质量为M,两遮光条间的距离为L,用不可伸长的细线绕过定滑轮,把木板与力传感器连接起来,传感器下方悬挂钩码,将木板由静止释放,由数字计时器可读出遮光条通过光电门的时间。
(1)在完成实验时,下列不必要的实验要求是______(填选项前字母)
A.应使木板质量远大于钩码和力传感器的总质量
B.应使木板释放的位置与光电门间的距离适当大些
C.应将气垫导轨调节水平
D.应使细线与气垫导轨平行
(2)按要求调整好实验装置后进行实验,主要测量步骤如下:
①将木板从距离光电门适当的位置由静止释放,木板在细线拉动下运动,记录力传感器的示数F及遮光条A、B先后经过光电门的时间为t1、t2,则遮光条A、B通过光电门的过程中木板动能的变化量ΔEk=___________,合外力对木板做功W=_______.(以上两空用字母M、t1、t2、d、L、F表示)
②增加所挂钩码的个数,重复①的操作,比较W、ΔEk的大小,可得出实验结论。
9.学校开展研究性学习,某同学为了探究杆子转动时的动能表达式,设计了下图所示的实验:质量为m的均匀长直杆一端固定在转轴O处,杆由水平位置静止释放,用置于圆弧上某位置的光电门测出另一端A经过该位置时的瞬时速度vA,并记下该位置与转轴O的高度差h.
(1)该同学用20分度的游标卡尺测得长直杆的横截面的直径如图为_____________mm。
(2)调节h的大小并记录对应的速度vA,数据如下表。
组
次
1
2
3
4
5
6
h/m
0.05
0.10
0.15
0.20
0.25
0.30
vA/(m·s-1)
1.23
1.73
2.12
2.46
2.74
3.00
vA-1/
s·m-1)
0.81
0.58
0.47
0.41
0.36
0.33
vA2/(m2·s-2)
1.50
3.00
4.50
6.05
7.51
9.00
为了形象直观地反映vA和h的关系,请选择适当的纵坐标并画出图象_______。
(3)当地重力加速度g取10m/s2,不计一切摩擦。请根据能量守恒规律并结合你找出的函数关系式,写出此杆转动时动能的表达式Ek=?_________(请用数字、质量m、速度vA表示)
(4)为了减小空气阻力对实验的影响,请提出一条可行性措施__________。
10.气垫导轨是研究与运动有关的实验装置,也可以用来研究功能关系.如图甲所示,在气垫导轨的左端固定一轻质弹簧,轨道上有一滑块A紧靠弹簧但不连接,滑块的质量为m.
(1)用游标卡尺测出滑块A上的挡光片的宽度,读数如图乙所示,则宽度d=__cm;
(2)利用该装置研究弹簧对滑块做功的大小;某同学打开气源,调节装置,使滑块可以静止悬浮在导轨上,然后用力将滑块A压紧到P点,释放后,滑块A上的挡光片通过光电门的时间为△t,则弹簧对滑块所做的功为__.(用题中所给字母表示)
(3)利用该装置测量滑块与导轨间的动摩擦因数;关闭气源,仍将滑块A由P点释放,当光电门到P点的距离为x时,测出滑块A上的挡光片通过光电门的时间为t,移动光电门,测出多组数据(滑块都能通过光电门),并绘出图象.如图丙所示,已知该图线斜率的绝对值为k,则滑块与导轨间的滑动摩擦因数为__.
参考答案
1.6.985(6.983~6.987均可)
细线长度(或摆长)
非线性
A
【解析】
(1)[1]螺旋测微器的固定刻度为6.5mm,可动刻度为48.5×0.01mm=0.485mm,所以最终读数为6.5mm+0.485mm=6.985mm,由于误差6.983mm~6.987mm均可
(2)[2]由实验原理有
可知,实验时,要采用控制变量法,保持小球质量m和摆长不变
[3]由图丙可知,小球在最低点受到细线拉力随速度的增大而非线性增大
[4]由实验原理有
即
则能直接从图像中得到定量关系的是图A
2.左
AB
【解析】
(1)[1].实验前用垫块垫高轨道左端平衡摩擦力,若不挂重物,发现遮光条A、B?经过光电门的挡光时间tA>tB,说明小车加速运动,则应将木板倾角减小,即垫块向左移动。
(2)[2].小车经过光电门时的速度分别为
则要验证的关系
则还需要测量两遮光条A、B间的距离L
以及重物的质量m,故选AB。
(3)
[3].验证动能定理是否成立需要验证的表达式为
3.BD
C
【解析】
(1)[1].要验证的是从滑块经过光电门到最后在木板上停止时动能减小量等于摩擦力做功,即
其中
可得
则必须要测量的物理量是:遮光片经过光电门时的遮光时间t和A点到B点的距离x,故选BD。
(2)
[2].由以上分析可知,需要验证表达式在误差范围内成立即可验证动能定理;
(3)
[3].A.滑块释放时初速度不为零对实验无影响,选项A错误;
B.曲面不光滑对实验无影响,选项B错误;
C.遮光片的宽度不够小,则测得的滑块经过A点的速度有误差,会给实验结果带来误差,选项C正确;
D.光电门安放在连接处稍偏右的地方对实验无影响,选项D错误;
故选C。
4.平衡摩擦力
后面部分
AC
A
【解析】
(1)要使橡皮筋对小车的拉力大小等于其合外力大小,实验中必须进行平衡摩擦力的操作,即垫高木板的一端.
(2)该实验中需要求出小车的最大速度即小车最后匀速运动的速度大小,因此需要利用纸带的后半部分.
(3)我们用橡皮筋拉动小车的方法,来探究橡皮筋的拉力对小车所做的功与小车速度变化的关系,这是一个非常精妙的设计.直接去测量一个正做变速运动物体所受拉力是很困难的.橡皮筋拉动小车的弹力虽然是个变力,但这个弹力做的功,数值上就等于橡皮筋发生形变时所具的弹性势能,而这个弹性势能又与橡皮筋的形变量相对应;橡皮筋的形变量一定,这个弹力做的功就是一定的.实验时,我们增加相同的橡皮条的数量,使功的大小成倍数增加,每次实验不必设法算出橡皮筋对小车做功的具体数值,但是实验中所选用橡皮筋的规格要一致,故A正确,D错误;每次实验中,橡皮筋拉伸的长度一定要保持一致,故B错误;每次小车在橡皮筋的作用下保持无初速度弹出,所以C正确;
(4)根据数学知识得到y=axn,式子中a为常系数,n为指数;当n=1时,图线为直线;当n<1时,图线向下弯曲;当n>1时,图线向上弯曲;甲图图线向上弯曲,故表达式W=avn中n为大于1的任意数值,不能得出功与速度的平方一定成正比的结论;而乙图中,W与v2成正比,故A正确,BCD错误.
5.AB
【解析】
(1)[1]根据能量转化可知,设窄片的宽度d,A、B两点间的距离x,弹性势能为Ep,有
故AB正确CD错误。
(2)[2][3]根据以上分析可知
结合图像可知
,
弹簧对木块做的总功等于弹性势能,结合图像可知
所以
6.0.375
D
【解析】
(1)由图乙所示游标卡尺可以知道,主尺示数为
,游标尺示数为
,,游标卡尺读数
;?
(2)通过光电门的速度为:
根据动能定理可以知道:
,?
要测量动摩擦因数,需要知道滑木板上BC间的距离
所以D选项是正确的.?
(3)根据动能定理可以知道:,?
计算得出:
综上所述本题答案是:(1).
0.375
(2).
D
(3).
7.AB
多次测量取平均值;选用宽度较小的挡光片
【解析】
(1)遮光片经过光电门的速度;由动能定理:解得;则除了需要测量挡光片的宽度d,还需要测量的物理量有:光电门与P点之间的距离s
和挡光片的挡光时间t,故选AB.
(2)动摩擦因数的表达式;
(3)可以减小实验误差的建议:多次测量取平均值可减小偶然误差;选用宽度较小的挡光片可减小测量速度产生的误差.
8.A
【解析】
(1)[1]
A.力传感器测出的力就是细线对木板的真是拉力,因此无需满足使木板质量远大于钩码和力传感器的总质量。
B.使木板释放的位置与光电门间的距离适当大些,可减小测量误差;
C、D.此实验需要满足导轨水平且细线与气垫导轨平行。
因此不必要的实验要求是A。
(2)[2]遮光条A通过光电门的速度,遮光条B通过光电门的速度,所以遮光条A、B通过光电门的过程中木板动能的变化量
[3]
此过程合外力对木板做功
9.7.25
选择密度较大的直杆(或选择直径较小的直杆)
【解析】
(1)[1]游标是20分度,精确度为0.05mm,游标卡尺的主尺读数为7mm,游标尺上第5条刻度线和主尺上某一刻度线对齐,所以游标读数为5×0.05mm=0.25mm,所以最终读数为:
7mm+0.25mm=7.25mm;
(2)[2]从数据中可看出,h与v2成正比,因此纵坐标应该是v2,图像应该是一条过原点的倾斜直线,通过描点拟合直线如图所示:
(3)[3]
由图像可读出斜率为,则函数关系为:
杆转动的过程重心下降的高度,由动能定理:
联立可得:
(4)[4]为了减小空气阻力对实验的影响,选择密度较大的直杆或选择直径较小的直杆.
10.0.960
【解析】
(1)[1]主尺读数为:9mm;游标尺分度为0.05mm,第12个刻度对齐,故游标尺读数为:0.05×12mm=0.60mm,故宽度为:d=9+0.60=9.60mm=0.960cm.
(2)[2]滑块通过光电门已经是匀速运动了,其平均速度为:
瞬时速度等于平均速度,故瞬时速度为:
此时滑块动能全部由弹簧弹性势能转化而来,故弹簧做功为:
(3)[3]每次都有P释放,则每次弹簧弹性势能都相同,由能量转化和守恒可得:
①
解得:
②
由于
故
带入可得动摩擦因数为:
课时作业(含解析)
1.某同学用光电门和力传感器来研究单摆运动时小球在最低点时细线拉力与小球速度的关系。如图甲所示,用光电门测量小球经过最低点A时的挡光时间t,同时用传感器测量细线对小球的拉力大小F。
(1)用螺旋测微器测量钢球的直径d,如图乙所示,则d=_______mm;通过公式就可以测出小球通过最低点的速度;
(2)实验时,要采用控制变量法,保持小球质量m和______不变,通过改变单摆最大摆角θ,来改变小球到达最低点的速度,这样就能得到一组数据,从而完成实验研究。某实验小组同学用测量的数据,在坐标中画出如图丙所示图像,得到了第一个结论:小球在最低点受到细线拉力随速度的增大而_______增大(填“线性”或“非线性”);为了进一步探究拉力和速度的定量关系,该小组做了以下几种图像,能直接从图像中得到定量关系的是图_______。
2.验证动能定理的实验装置如图所示,较长的小车的前端固定有力传感器,能测出小车所受的拉力,小车上固定两个完全相同的遮光条A、B,小车放在安装有定滑轮和光电门的轨道D上,光电门可记录遮光条A、B通过它时的挡光时间。用不可伸长的细线将小车与质量为m的重物相连,轨道放在水平桌面上,细线与轨道平行(滑轮质量、摩擦不计)。
实验主要步骤如下:
①测量小车、传感器及遮光条的总质量M,遮光条的宽度d;
②按图正确连接器材;
③由静止释放小车,小车在细线拉动下运动,记录传感器的示数F及遮光条A、B?经过光电门的挡光时间tA、tB。
(1)实验前用垫块垫高轨道左端平衡摩擦力,若不挂重物,发现遮光条A、B?经过光电门的挡光时间tA>tB,则应将垫块向_________(选填“左”或“右”)移动。
(2)为验证动能定理还需要测量的物理量是:______________
A.两遮光条A、B间的距离L
B.重物的质量m
C.开始释放时遮光片A到光电门的距离s
(3)验证动能定理是否成立需要验证的表达式为__________(用所测物理量的符号表示)。
3.某小组同学用如图所示的装置来“验证动能定理”,长木板固定在水平桌面上,其左端与一粗糙曲面平滑连接,木板与曲面连接处固定一光电门,A是光电门的中心位置,滑块P上固定一宽度为d的遮光片。将滑块从曲面的不同高度释放,经过光电门后,在木板上停下来,设停下来的那点为B点。该小组已经测出滑块与木板间的动摩擦因数为、査得当地重力加速度为g。根据本实验的原理和目的回答以下问题:
(1)为了“验证动能定理”,他们必需测量的物理量有___________;
A.滑块释放的高度h
B.遮光片经过光电门时的遮光时间t
C.滑块的质量m
D.A点到B点的距离x
(2)该组同学利用题中已知的物理量和(1)问中必需测量的物理量,只需要验证表达式___________在误差范围内成立即可验证动能定理;
(3)以下因素会给实验结果带来误差的是___________。
A.滑块释放时初速度不为零
B.曲面不光滑
C.遮光片的宽度不够小
D.光电门安放在连接处稍偏右的地方
4.在《探究功与物体速度变化的关系》实验时,小车在橡皮条弹力的作用下被弹出,沿木板滑,实验装置如图1所示.
(1)适当垫高木板是为了_____;
(2)通过打点计器的纸带记录小车的运动情况,观察发现纸带前面部分点迹疏密不匀,后面部分点迹比较均匀,通过纸带求小车速度时,应使用纸带______(填“全部”、“前面部分”或“后面部分”);
(3)关于实验中的操作或分析,下列叙述正确的是______
A.实验中所选用橡皮筋的规格要一致
B.实验中,橡皮筋拉伸的长度没有必要保持一致
C.小车在橡皮筋的作用下保持无初速度弹出
D.每次实验必须设法算出橡皮筋对小车做功的具体数值
(4)实验中,甲、乙两位同学的实验操作均正确.甲同学根据实验数据作出了W﹣v图,如图2甲,并由此图线得出“功与速度的平方一定成正比”的结论.乙同学根据实验数据作出了W﹣v2图,如图2乙,并由此也得出“功与速度的平方一定成正比”的结论.关于甲、乙两位同学的分析,你的评价是__
A.甲的分析不正确,乙的分析正确
B.甲的分析正确,乙的分析不正确
C.甲和乙的分析都正确
D.甲和乙的分析都不正确.
5.如图甲所示为某探究小组设计的“用DIS测定动摩擦因数”的实验装置示意图。一长木板固定在水平桌面上,长木板上表面水平,轻弹簧水平放置在长木板上,其右端固定在长木板的C处,左端连一木块,木块上方固定有窄片P,当弹簧处于原长时,木块在A点处,光电门(未画出,用以测量窄片的遮光时间)固定在A点。第一次,将木块向右压缩弹簧使木块移到B点处并由静止释放,记下木块通过A处时窄片的遮光时间t1测出木块的质量m1;第二次,在木块上方增加砝码后,向右压缩弹簧使木块再次移到B点处并由静止释放,木块通过A处记下窄片的遮光时间t2。测出木块和砝码的总质量m2;如此反复多次实验。请回答下列问题:(已知重力加速度大小为g)
(1)为了测量木块与长木板间的动摩擦因数,实验中还需要测量的物理量有_______。
A.窄片的宽度d
B.A、B两点间的距离x
C.木块从B点运动到A点的时间t0
D.弹簧的劲度系数k
(2)在坐标纸上作出窄片遮光时间t的平方的倒数随木块质量的倒数变化的关系图象,如图乙所示,根据图线,求得木块与长木板间的动摩擦因数μ
=__________,木块从B点运动到A点的过程,弹簧对木块做的总功WF
=_____________。(用含a、b、g及还需要测量的物理量字母表示)
6.某物理小组在一次探究活动中测量小滑块与木板之间的动摩擦因数μ.实验装置如图甲所示,一表面粗糙的木板固定在水平桌面上,P为连接数字计时器的光电门且固定在B点.实验时给带有遮光条的小滑块一个初速度,让它沿木板从左侧向右运动,小滑块通过光电门P后最终停在木板上某点C.已知当地重力加速度为g.
(1)用游标卡尺测量遮光条的宽度d如图乙所示,其读数d=___________cm.
(2)为了测量动摩擦因数,除遮光条宽度d及数字计时器显示的时间t外,下列物理量中还需测量的有___________.
A.木板的长度L1
B.木板的质量m1
C.小滑块的质量m2
D.木板上BC间的距离L2
(3)滑块与木板间的动摩擦因数μ=___________(用题中所涉及的物理量的符号表示)
7.如图所示的装置可以用来测量滑块与水平面之间的动摩擦因数.在水平面上将弹簧的一端固定,另一端与带有挡光片的滑块接触(弹簧与滑块不固连).压缩弹簧后,将其释放,滑块被弹射,离开弹簧后经过O处的光电门,最终停在P点.
(1)除了需要测量挡光片的宽度d,还需要测量的物理量有____.
A.光电门与P点之间的距离s
B.挡光片的挡光时间t
C.滑块(带挡光片)的质量m
D.滑块释放点到P点的距离x
(2)动摩擦因数的表达式μ=____(用上述测量量和重力加速度g表示).
(3)请提出一个可以减小实验误差的建议:_________
8.用如图所示的实验装置探究功和动能变化的关系。一木板放在安装有定滑轮和光电门的气垫导轨上,木板左右两端安装了宽度均为d的相同遮光条A、B,木板(含遮光条)的质量为M,两遮光条间的距离为L,用不可伸长的细线绕过定滑轮,把木板与力传感器连接起来,传感器下方悬挂钩码,将木板由静止释放,由数字计时器可读出遮光条通过光电门的时间。
(1)在完成实验时,下列不必要的实验要求是______(填选项前字母)
A.应使木板质量远大于钩码和力传感器的总质量
B.应使木板释放的位置与光电门间的距离适当大些
C.应将气垫导轨调节水平
D.应使细线与气垫导轨平行
(2)按要求调整好实验装置后进行实验,主要测量步骤如下:
①将木板从距离光电门适当的位置由静止释放,木板在细线拉动下运动,记录力传感器的示数F及遮光条A、B先后经过光电门的时间为t1、t2,则遮光条A、B通过光电门的过程中木板动能的变化量ΔEk=___________,合外力对木板做功W=_______.(以上两空用字母M、t1、t2、d、L、F表示)
②增加所挂钩码的个数,重复①的操作,比较W、ΔEk的大小,可得出实验结论。
9.学校开展研究性学习,某同学为了探究杆子转动时的动能表达式,设计了下图所示的实验:质量为m的均匀长直杆一端固定在转轴O处,杆由水平位置静止释放,用置于圆弧上某位置的光电门测出另一端A经过该位置时的瞬时速度vA,并记下该位置与转轴O的高度差h.
(1)该同学用20分度的游标卡尺测得长直杆的横截面的直径如图为_____________mm。
(2)调节h的大小并记录对应的速度vA,数据如下表。
组
次
1
2
3
4
5
6
h/m
0.05
0.10
0.15
0.20
0.25
0.30
vA/(m·s-1)
1.23
1.73
2.12
2.46
2.74
3.00
vA-1/
s·m-1)
0.81
0.58
0.47
0.41
0.36
0.33
vA2/(m2·s-2)
1.50
3.00
4.50
6.05
7.51
9.00
为了形象直观地反映vA和h的关系,请选择适当的纵坐标并画出图象_______。
(3)当地重力加速度g取10m/s2,不计一切摩擦。请根据能量守恒规律并结合你找出的函数关系式,写出此杆转动时动能的表达式Ek=?_________(请用数字、质量m、速度vA表示)
(4)为了减小空气阻力对实验的影响,请提出一条可行性措施__________。
10.气垫导轨是研究与运动有关的实验装置,也可以用来研究功能关系.如图甲所示,在气垫导轨的左端固定一轻质弹簧,轨道上有一滑块A紧靠弹簧但不连接,滑块的质量为m.
(1)用游标卡尺测出滑块A上的挡光片的宽度,读数如图乙所示,则宽度d=__cm;
(2)利用该装置研究弹簧对滑块做功的大小;某同学打开气源,调节装置,使滑块可以静止悬浮在导轨上,然后用力将滑块A压紧到P点,释放后,滑块A上的挡光片通过光电门的时间为△t,则弹簧对滑块所做的功为__.(用题中所给字母表示)
(3)利用该装置测量滑块与导轨间的动摩擦因数;关闭气源,仍将滑块A由P点释放,当光电门到P点的距离为x时,测出滑块A上的挡光片通过光电门的时间为t,移动光电门,测出多组数据(滑块都能通过光电门),并绘出图象.如图丙所示,已知该图线斜率的绝对值为k,则滑块与导轨间的滑动摩擦因数为__.
参考答案
1.6.985(6.983~6.987均可)
细线长度(或摆长)
非线性
A
【解析】
(1)[1]螺旋测微器的固定刻度为6.5mm,可动刻度为48.5×0.01mm=0.485mm,所以最终读数为6.5mm+0.485mm=6.985mm,由于误差6.983mm~6.987mm均可
(2)[2]由实验原理有
可知,实验时,要采用控制变量法,保持小球质量m和摆长不变
[3]由图丙可知,小球在最低点受到细线拉力随速度的增大而非线性增大
[4]由实验原理有
即
则能直接从图像中得到定量关系的是图A
2.左
AB
【解析】
(1)[1].实验前用垫块垫高轨道左端平衡摩擦力,若不挂重物,发现遮光条A、B?经过光电门的挡光时间tA>tB,说明小车加速运动,则应将木板倾角减小,即垫块向左移动。
(2)[2].小车经过光电门时的速度分别为
则要验证的关系
则还需要测量两遮光条A、B间的距离L
以及重物的质量m,故选AB。
(3)
[3].验证动能定理是否成立需要验证的表达式为
3.BD
C
【解析】
(1)[1].要验证的是从滑块经过光电门到最后在木板上停止时动能减小量等于摩擦力做功,即
其中
可得
则必须要测量的物理量是:遮光片经过光电门时的遮光时间t和A点到B点的距离x,故选BD。
(2)
[2].由以上分析可知,需要验证表达式在误差范围内成立即可验证动能定理;
(3)
[3].A.滑块释放时初速度不为零对实验无影响,选项A错误;
B.曲面不光滑对实验无影响,选项B错误;
C.遮光片的宽度不够小,则测得的滑块经过A点的速度有误差,会给实验结果带来误差,选项C正确;
D.光电门安放在连接处稍偏右的地方对实验无影响,选项D错误;
故选C。
4.平衡摩擦力
后面部分
AC
A
【解析】
(1)要使橡皮筋对小车的拉力大小等于其合外力大小,实验中必须进行平衡摩擦力的操作,即垫高木板的一端.
(2)该实验中需要求出小车的最大速度即小车最后匀速运动的速度大小,因此需要利用纸带的后半部分.
(3)我们用橡皮筋拉动小车的方法,来探究橡皮筋的拉力对小车所做的功与小车速度变化的关系,这是一个非常精妙的设计.直接去测量一个正做变速运动物体所受拉力是很困难的.橡皮筋拉动小车的弹力虽然是个变力,但这个弹力做的功,数值上就等于橡皮筋发生形变时所具的弹性势能,而这个弹性势能又与橡皮筋的形变量相对应;橡皮筋的形变量一定,这个弹力做的功就是一定的.实验时,我们增加相同的橡皮条的数量,使功的大小成倍数增加,每次实验不必设法算出橡皮筋对小车做功的具体数值,但是实验中所选用橡皮筋的规格要一致,故A正确,D错误;每次实验中,橡皮筋拉伸的长度一定要保持一致,故B错误;每次小车在橡皮筋的作用下保持无初速度弹出,所以C正确;
(4)根据数学知识得到y=axn,式子中a为常系数,n为指数;当n=1时,图线为直线;当n<1时,图线向下弯曲;当n>1时,图线向上弯曲;甲图图线向上弯曲,故表达式W=avn中n为大于1的任意数值,不能得出功与速度的平方一定成正比的结论;而乙图中,W与v2成正比,故A正确,BCD错误.
5.AB
【解析】
(1)[1]根据能量转化可知,设窄片的宽度d,A、B两点间的距离x,弹性势能为Ep,有
故AB正确CD错误。
(2)[2][3]根据以上分析可知
结合图像可知
,
弹簧对木块做的总功等于弹性势能,结合图像可知
所以
6.0.375
D
【解析】
(1)由图乙所示游标卡尺可以知道,主尺示数为
,游标尺示数为
,,游标卡尺读数
;?
(2)通过光电门的速度为:
根据动能定理可以知道:
,?
要测量动摩擦因数,需要知道滑木板上BC间的距离
所以D选项是正确的.?
(3)根据动能定理可以知道:,?
计算得出:
综上所述本题答案是:(1).
0.375
(2).
D
(3).
7.AB
多次测量取平均值;选用宽度较小的挡光片
【解析】
(1)遮光片经过光电门的速度;由动能定理:解得;则除了需要测量挡光片的宽度d,还需要测量的物理量有:光电门与P点之间的距离s
和挡光片的挡光时间t,故选AB.
(2)动摩擦因数的表达式;
(3)可以减小实验误差的建议:多次测量取平均值可减小偶然误差;选用宽度较小的挡光片可减小测量速度产生的误差.
8.A
【解析】
(1)[1]
A.力传感器测出的力就是细线对木板的真是拉力,因此无需满足使木板质量远大于钩码和力传感器的总质量。
B.使木板释放的位置与光电门间的距离适当大些,可减小测量误差;
C、D.此实验需要满足导轨水平且细线与气垫导轨平行。
因此不必要的实验要求是A。
(2)[2]遮光条A通过光电门的速度,遮光条B通过光电门的速度,所以遮光条A、B通过光电门的过程中木板动能的变化量
[3]
此过程合外力对木板做功
9.7.25
选择密度较大的直杆(或选择直径较小的直杆)
【解析】
(1)[1]游标是20分度,精确度为0.05mm,游标卡尺的主尺读数为7mm,游标尺上第5条刻度线和主尺上某一刻度线对齐,所以游标读数为5×0.05mm=0.25mm,所以最终读数为:
7mm+0.25mm=7.25mm;
(2)[2]从数据中可看出,h与v2成正比,因此纵坐标应该是v2,图像应该是一条过原点的倾斜直线,通过描点拟合直线如图所示:
(3)[3]
由图像可读出斜率为,则函数关系为:
杆转动的过程重心下降的高度,由动能定理:
联立可得:
(4)[4]为了减小空气阻力对实验的影响,选择密度较大的直杆或选择直径较小的直杆.
10.0.960
【解析】
(1)[1]主尺读数为:9mm;游标尺分度为0.05mm,第12个刻度对齐,故游标尺读数为:0.05×12mm=0.60mm,故宽度为:d=9+0.60=9.60mm=0.960cm.
(2)[2]滑块通过光电门已经是匀速运动了,其平均速度为:
瞬时速度等于平均速度,故瞬时速度为:
此时滑块动能全部由弹簧弹性势能转化而来,故弹簧做功为:
(3)[3]每次都有P释放,则每次弹簧弹性势能都相同,由能量转化和守恒可得:
①
解得:
②
由于
故
带入可得动摩擦因数为:
同课章节目录
- 第一章 怎样研究抛体运动
- 1 飞机投弹与平抛运动
- 2 研究平抛运动的规律
- 3 研究斜抛运动
- 第二章 研究圆周运动
- 1 怎样描述圆周运动
- 2 研究匀速圆周运动的规律
- 3 圆周运动的案例分析
- 4 研究离心现象及其应用
- 第三章 动能的变化与机械功
- 1 探究动能变化跟功的关系
- 2 研究功与功率
- 3 动能定理的应用
- 第四章 能量守恒与可持续发展
- 1 势能的变化与机械功
- 2 研究机械能守恒定律
- 3 能量的转化与守恒
- 4 能源与可持续发展
- 第五章 万有引力与航天
- 1 从托勒密到开普勒
- 2 万有引力定律是怎样发现的
- 3 万有引力定律与天文学的新发现
- 4 飞出地球去
- 第六章 经典力学与现代物理
- 1 经典力学的巨大成就和局限性
- 2 狭义相对论的基本原理
- 3 爱因斯坦心目中的宇宙
- 4 微观世界与量子论