北师大版信息技术八下 2.10 导盲机器人(一) 课件(共17张PPT)
文档属性
| 名称 | 北师大版信息技术八下 2.10 导盲机器人(一) 课件(共17张PPT) |

|
|
| 格式 | pptx | ||
| 文件大小 | 3.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-06-22 00:00:00 | ||
图片预览





文档简介
导盲机器人(一)
活动任务
小明是位盲人学生。父母由于工作的原因,不能天天接送小明上学,这该怎么办呢?小明的父母为小明定做了一台导盲机器人,让它带着小明上学、放学及散步。但是机器人定做完成后,由于还没有程序的支持,所以还无法完成这个重任。下面就让我们一起为机器人写程序,让它能够领着小明上学、放学、散步。在本节中,我们主要完成从家到学校以及街心花园散步的导盲程序。
我的问题
如何可以让机器人带领小明上下学?
利用前面学过的直行模块与转向模块是否可以完成程序的编写?
编写的程序是否会出现问题?
在写程序的时候应该注意什么?
活动建议
(1)仔细分析清楚路的情况;
(2)利用走指定步长和转指定角度的方法来完成导盲任务;
(3)多次调整“直行”模块中速度与时间的数值,以让机器人能够准确地在“路”上行走;
(4)注意“街心花园”四周路的特点,利用更简单的方法编写程序。
操作指南
一、上学程序
1.分析间题
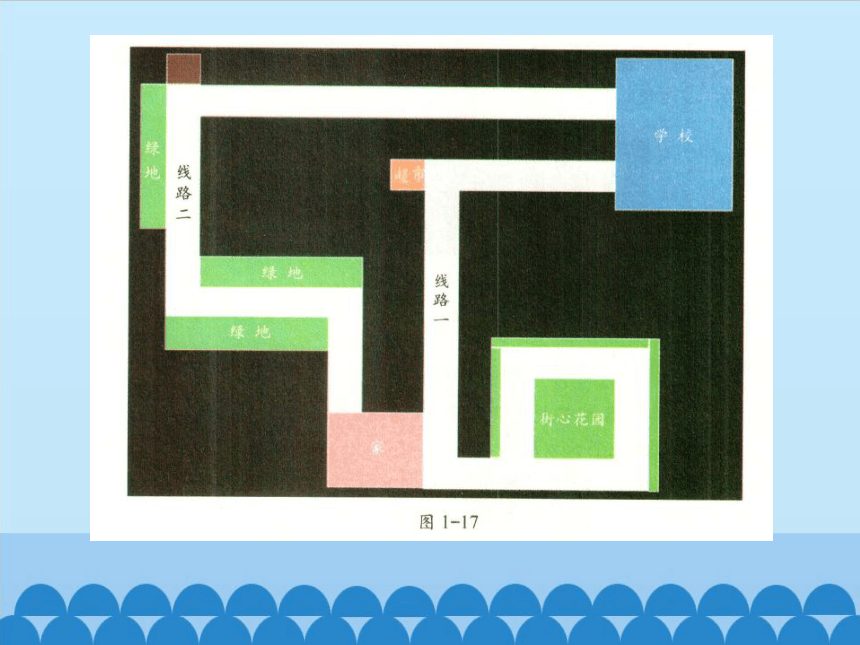
先将线路一作为首选路线,这时从家到学校的路程比较短。下面来分析下线路一的情况。线路一是由如图1-18所示的A,B两段路组成,机器人带领小明出发去学校的步骤为:
(1)前进A段路的距离;
(2)右转90度;
(3)前进B段路的距离。
2.解决问题
(1)加载场地
①进入仿真环境窗口。
②单击“功能区”里的“加载”按钮。
③在弹出来的“选择环境”窗口中选择配套光盘的“场地文件夹”,从中找到“导盲final.ini”文件。
④单击右下方的“进入环境”按钮,如图1-19所示。这时我们就可以看见如图1-20所示的导盲场地了。
(2)利用“直行”模块前进A段路的距离
①进入主程序窗口。
②在主程序下方链接“前进”模块。
③3在“前进”模块下方链接“结束”模块。
④调整“前进”模块的参数:速度和时间。
⑤进入仿真环境窗口,将机器人放置到适当位置(如图1-21所示的位置)并单击“运行”按钮。
⑥重复④、⑤直到使机器人正好走完A段路。
二、散步程序
上学的程序完成了,下面让我们给机器人再写一段能够领着小明在一个如图1-22所示的正方形街心花园散步的程序。
1.方法一
从A到B,右转90度。
从B到C,右转90度。
从C到D,右转90度。
从D到A,右转90度。
这种方法与前一节中设计的“画正方形程序”基本一致,只要通过调整合适的“直行”模块的速度与时间,很容易就可以完成这个任务。通过上面的任务分析,你发现了什么?有没有重复的部分?
2.方法二
由于正方形四边相等,所以从A到B、B到C、C到D、D到A的距离相等,每次右转的角度也相同。这时我们就可以只编写从A到B的程序,再将这个过程重复4次来画正方形。这时就要用到一个新模块,“多次循环”模块。
(1)把“控制模块库”中的“多次循环”模块拖到流程图生成区并与“主程序”模块链接,如图1-24所示。
(2)把“直行”模块和“转向”模块添加到循环结构中,如图1-25所示。
(3)在“多次循环”模块上单击鼠标右键,将弹出的“多次循环模块”对话框中的循环次数改为△。境中试试程序完成了,快到仿真环吧!
练习与思考
用今天学过的知识完成下面两个任务:
(1)给机器人设计程序,让它能够带着小明从路线二到达学校。
(2)给机器人设计程序,让它能够带着小明从家出发,到街心公园散步后再回到家。
谢 谢
活动任务
小明是位盲人学生。父母由于工作的原因,不能天天接送小明上学,这该怎么办呢?小明的父母为小明定做了一台导盲机器人,让它带着小明上学、放学及散步。但是机器人定做完成后,由于还没有程序的支持,所以还无法完成这个重任。下面就让我们一起为机器人写程序,让它能够领着小明上学、放学、散步。在本节中,我们主要完成从家到学校以及街心花园散步的导盲程序。
我的问题
如何可以让机器人带领小明上下学?
利用前面学过的直行模块与转向模块是否可以完成程序的编写?
编写的程序是否会出现问题?
在写程序的时候应该注意什么?
活动建议
(1)仔细分析清楚路的情况;
(2)利用走指定步长和转指定角度的方法来完成导盲任务;
(3)多次调整“直行”模块中速度与时间的数值,以让机器人能够准确地在“路”上行走;
(4)注意“街心花园”四周路的特点,利用更简单的方法编写程序。
操作指南
一、上学程序
1.分析间题
先将线路一作为首选路线,这时从家到学校的路程比较短。下面来分析下线路一的情况。线路一是由如图1-18所示的A,B两段路组成,机器人带领小明出发去学校的步骤为:
(1)前进A段路的距离;
(2)右转90度;
(3)前进B段路的距离。
2.解决问题
(1)加载场地
①进入仿真环境窗口。
②单击“功能区”里的“加载”按钮。
③在弹出来的“选择环境”窗口中选择配套光盘的“场地文件夹”,从中找到“导盲final.ini”文件。
④单击右下方的“进入环境”按钮,如图1-19所示。这时我们就可以看见如图1-20所示的导盲场地了。
(2)利用“直行”模块前进A段路的距离
①进入主程序窗口。
②在主程序下方链接“前进”模块。
③3在“前进”模块下方链接“结束”模块。
④调整“前进”模块的参数:速度和时间。
⑤进入仿真环境窗口,将机器人放置到适当位置(如图1-21所示的位置)并单击“运行”按钮。
⑥重复④、⑤直到使机器人正好走完A段路。
二、散步程序
上学的程序完成了,下面让我们给机器人再写一段能够领着小明在一个如图1-22所示的正方形街心花园散步的程序。
1.方法一
从A到B,右转90度。
从B到C,右转90度。
从C到D,右转90度。
从D到A,右转90度。
这种方法与前一节中设计的“画正方形程序”基本一致,只要通过调整合适的“直行”模块的速度与时间,很容易就可以完成这个任务。通过上面的任务分析,你发现了什么?有没有重复的部分?
2.方法二
由于正方形四边相等,所以从A到B、B到C、C到D、D到A的距离相等,每次右转的角度也相同。这时我们就可以只编写从A到B的程序,再将这个过程重复4次来画正方形。这时就要用到一个新模块,“多次循环”模块。
(1)把“控制模块库”中的“多次循环”模块拖到流程图生成区并与“主程序”模块链接,如图1-24所示。
(2)把“直行”模块和“转向”模块添加到循环结构中,如图1-25所示。
(3)在“多次循环”模块上单击鼠标右键,将弹出的“多次循环模块”对话框中的循环次数改为△。境中试试程序完成了,快到仿真环吧!
练习与思考
用今天学过的知识完成下面两个任务:
(1)给机器人设计程序,让它能够带着小明从路线二到达学校。
(2)给机器人设计程序,让它能够带着小明从家出发,到街心公园散步后再回到家。
谢 谢