人教版物理第十二章,简单机械,第2节,滑轮(共19张PPT)
文档属性
| 名称 | 人教版物理第十二章,简单机械,第2节,滑轮(共19张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 28.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2020-07-27 00:00:00 | ||
图片预览
文档简介
(共19张PPT)
第十二章
简单机械
第2节
滑轮
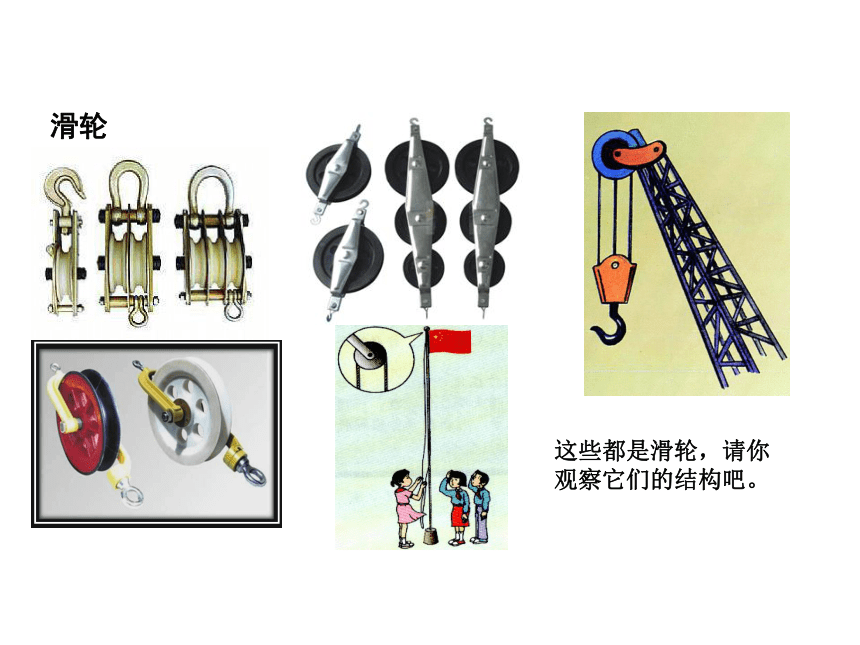
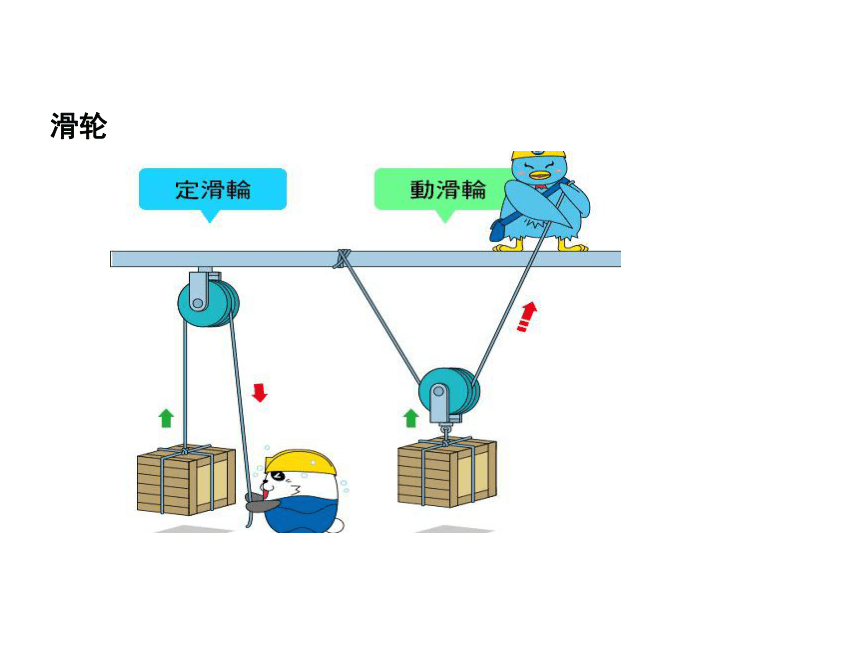
滑轮
这些都是滑轮,请你观察它们的结构吧。
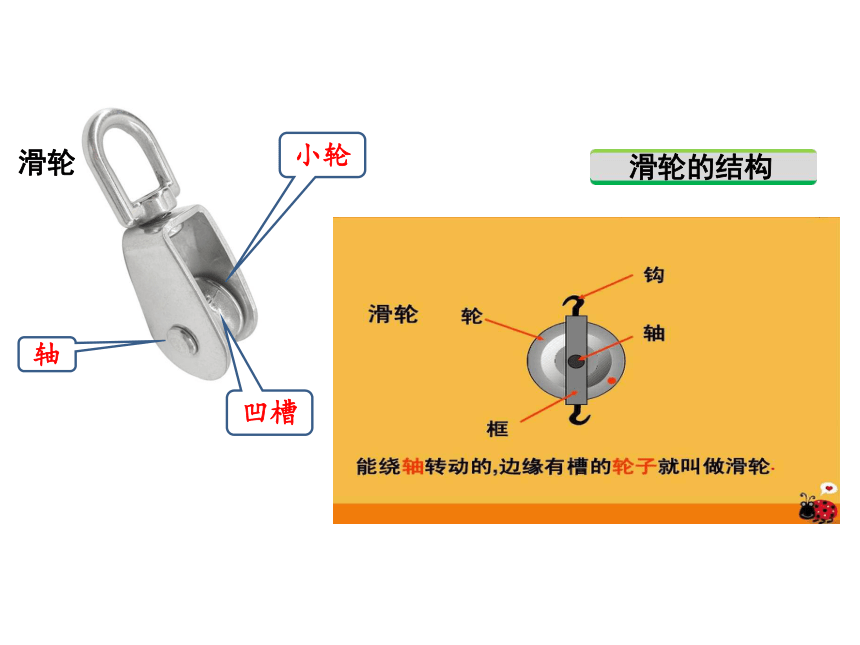
轴
小轮
凹槽
滑轮
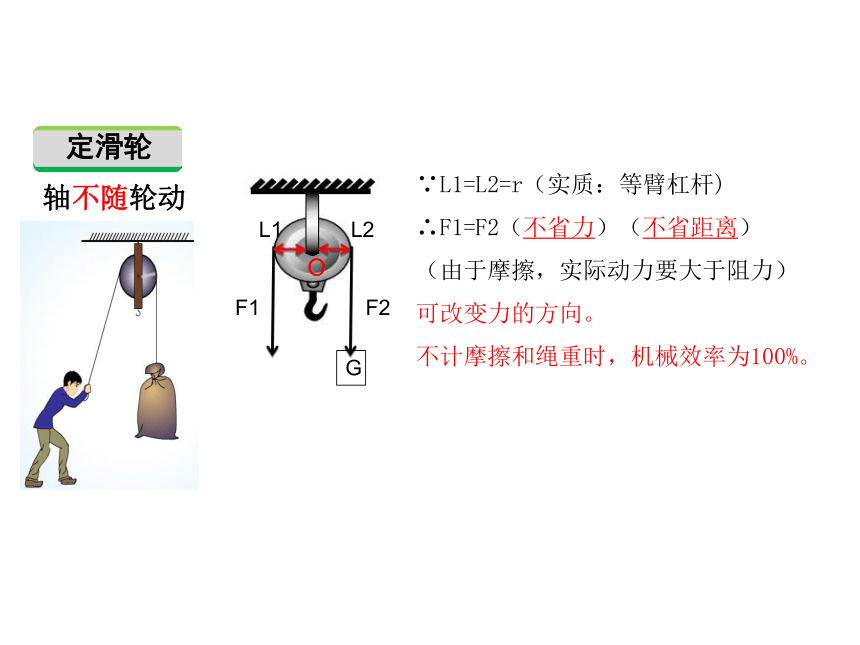
滑轮
轴不随轮动
F1
F2
G
∵L1=L2=r(实质:等臂杠杆)
∴F1=F2(不省力)(不省距离)
(由于摩擦,实际动力要大于阻力)
可改变力的方向。
不计摩擦和绳重时,机械效率为100%。
L2
L1
O
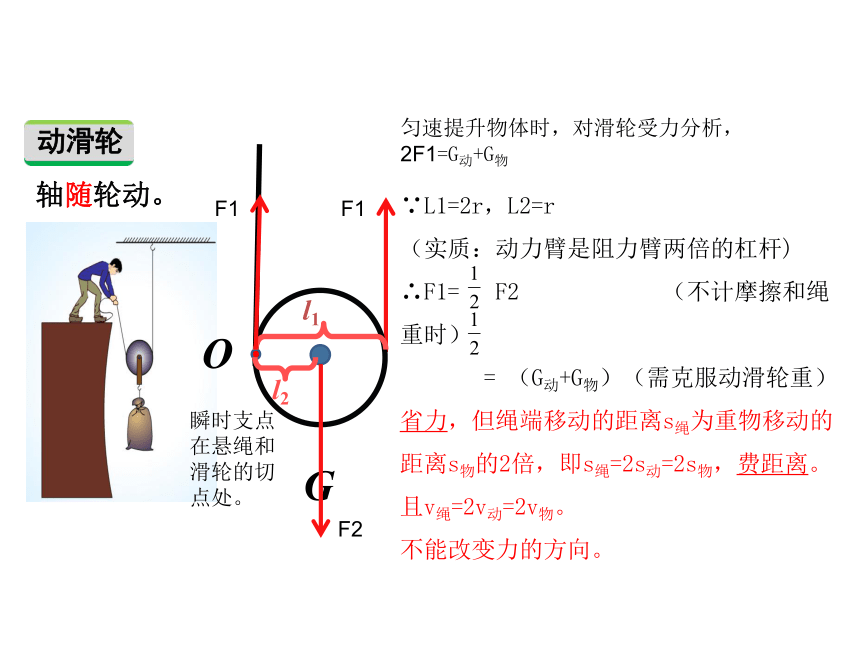
轴随轮动。
O
G
l1
l2
F1
F1
F2
瞬时支点在悬绳和滑轮的切点处。
∵L1=2r,L2=r
(实质:动力臂是阻力臂两倍的杠杆)
∴F1=
F2
(不计摩擦和绳重时)
=
(G动+G物)(需克服动滑轮重)
省力,但绳端移动的距离s绳为重物移动的距离s物的2倍,即s绳=2s动=2s物,费距离。且v绳=2v动=2v物。
不能改变力的方向。
匀速提升物体时,对滑轮受力分析,2F1=G动+G物
O
G
l1
l2
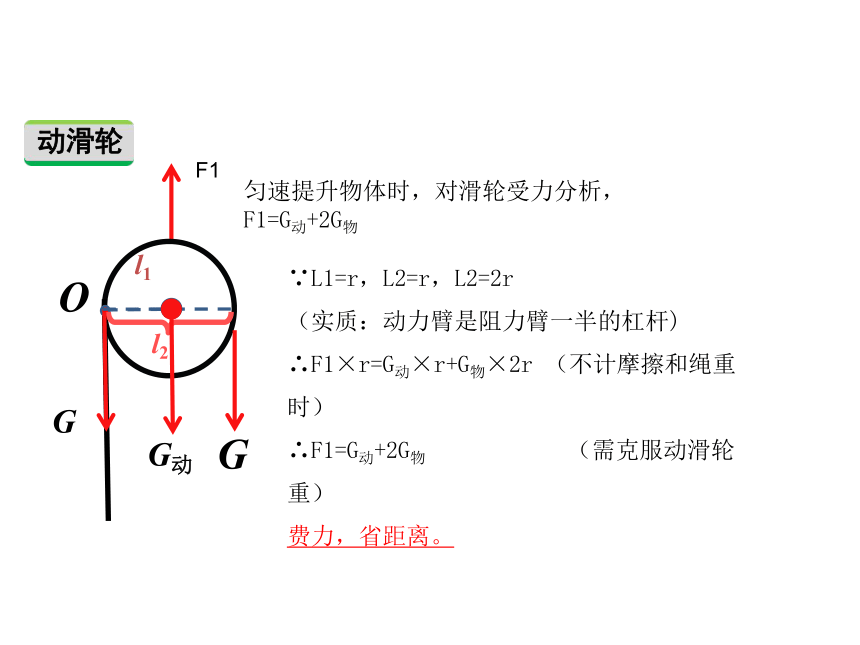
匀速提升物体时,对滑轮受力分析,F1=G动+2G物
G动
F1
G
∵L1=r,L2=r,L2=2r
(实质:动力臂是阻力臂一半的杠杆)
∴F1×r=G动×r+G物×2r
(不计摩擦和绳重时)
∴F1=G动+2G物
(需克服动滑轮重)
费力,省距离。
定滑轮可以改变力的方向,但不能省力。动滑轮可以省力,但不能改变力的方向。能否得到这样一种机械,它既可以省力,又可以改变力的方向呢?
由若干个定滑轮和动滑轮组成的装置
3段绳子承担
2段绳子承担
5段绳子承担
4段绳子承担
绳子的开始端挂在定滑轮上,物重由偶数段绳子承担。
绳子的开始端挂在动滑轮上,物重由奇数段绳子承担。
奇动偶定
G+G动
G+G动
匀速提升物体时,
对滑轮受力分析,
2F1=F2=G动+G物
则F1=
F2
=
(G动+G物)
(不计摩擦和绳重时)
(需克服动滑轮重)
3F1=F2=G动+G物
则F1=
F2
=
(G动+G物)
F1
F1
F1
F1
F1
F1
F1
F1=
F2(不计摩擦和绳重时)
=
(G物+G动)(需克服动滑轮重)
n:承担物重的绳子的段数(定动之间横切)
省力,费距离:s绳=ns动=ns物=nh。
且v绳=nv动=nv物。
由具有共同转动轴的大轮和小轮组成。
动力臂大于阻力臂
——
省力杠杆
可以连续转动的杠杆。
l1
l2
门的把手
单车的踏板
螺丝刀
斜面也是一种简单机械,使用斜面能够省力。
定滑轮左端绳子下端挂着相同的重物,若在定滑轮右端的绳子自由端分别沿三个方向用力(如图所示),力的大小分别为:F1、F2、F3,则
(
)
A.F1最大
B.F2最大
C.F3最大
D.三个力一样大
D
用滑轮按图甲、乙、丙所示三种不同方式,拉着同一物体在水平面上做匀速直线运动,拉力分别是F1、F2、F3,则(
)
A.
F1>F2>F3
B.
F2>F3>F1
C.
F2>F1>F3
D.
F3>F1>F2
D
F=G/4
F=G/5
根据绕线确定F与G的大小关系(不计摩擦、绳重和动滑轮重)
(2019?盐城)如图所示,工人用动滑轮匀速提升重物,这样做
( )
A.省力,不改变施力的方向
B.不省力,改变施力的方向
C.既省力,也改变施力的方向
D.既不省力,也不改变施力的方向
A
如图,分别用甲、乙两种形式的滑轮组把重为400N的物体匀速向上提起;已知每个滑轮重20N,忽略绳子的重力以及滑轮与绳子的摩擦,图甲中车对绳子的拉力为________N,图乙中人对绳子的拉力为__________N。
400
210
第十二章
简单机械
第2节
滑轮
滑轮
这些都是滑轮,请你观察它们的结构吧。
轴
小轮
凹槽
滑轮
滑轮
轴不随轮动
F1
F2
G
∵L1=L2=r(实质:等臂杠杆)
∴F1=F2(不省力)(不省距离)
(由于摩擦,实际动力要大于阻力)
可改变力的方向。
不计摩擦和绳重时,机械效率为100%。
L2
L1
O
轴随轮动。
O
G
l1
l2
F1
F1
F2
瞬时支点在悬绳和滑轮的切点处。
∵L1=2r,L2=r
(实质:动力臂是阻力臂两倍的杠杆)
∴F1=
F2
(不计摩擦和绳重时)
=
(G动+G物)(需克服动滑轮重)
省力,但绳端移动的距离s绳为重物移动的距离s物的2倍,即s绳=2s动=2s物,费距离。且v绳=2v动=2v物。
不能改变力的方向。
匀速提升物体时,对滑轮受力分析,2F1=G动+G物
O
G
l1
l2
匀速提升物体时,对滑轮受力分析,F1=G动+2G物
G动
F1
G
∵L1=r,L2=r,L2=2r
(实质:动力臂是阻力臂一半的杠杆)
∴F1×r=G动×r+G物×2r
(不计摩擦和绳重时)
∴F1=G动+2G物
(需克服动滑轮重)
费力,省距离。
定滑轮可以改变力的方向,但不能省力。动滑轮可以省力,但不能改变力的方向。能否得到这样一种机械,它既可以省力,又可以改变力的方向呢?
由若干个定滑轮和动滑轮组成的装置
3段绳子承担
2段绳子承担
5段绳子承担
4段绳子承担
绳子的开始端挂在定滑轮上,物重由偶数段绳子承担。
绳子的开始端挂在动滑轮上,物重由奇数段绳子承担。
奇动偶定
G+G动
G+G动
匀速提升物体时,
对滑轮受力分析,
2F1=F2=G动+G物
则F1=
F2
=
(G动+G物)
(不计摩擦和绳重时)
(需克服动滑轮重)
3F1=F2=G动+G物
则F1=
F2
=
(G动+G物)
F1
F1
F1
F1
F1
F1
F1
F1=
F2(不计摩擦和绳重时)
=
(G物+G动)(需克服动滑轮重)
n:承担物重的绳子的段数(定动之间横切)
省力,费距离:s绳=ns动=ns物=nh。
且v绳=nv动=nv物。
由具有共同转动轴的大轮和小轮组成。
动力臂大于阻力臂
——
省力杠杆
可以连续转动的杠杆。
l1
l2
门的把手
单车的踏板
螺丝刀
斜面也是一种简单机械,使用斜面能够省力。
定滑轮左端绳子下端挂着相同的重物,若在定滑轮右端的绳子自由端分别沿三个方向用力(如图所示),力的大小分别为:F1、F2、F3,则
(
)
A.F1最大
B.F2最大
C.F3最大
D.三个力一样大
D
用滑轮按图甲、乙、丙所示三种不同方式,拉着同一物体在水平面上做匀速直线运动,拉力分别是F1、F2、F3,则(
)
A.
F1>F2>F3
B.
F2>F3>F1
C.
F2>F1>F3
D.
F3>F1>F2
D
F=G/4
F=G/5
根据绕线确定F与G的大小关系(不计摩擦、绳重和动滑轮重)
(2019?盐城)如图所示,工人用动滑轮匀速提升重物,这样做
( )
A.省力,不改变施力的方向
B.不省力,改变施力的方向
C.既省力,也改变施力的方向
D.既不省力,也不改变施力的方向
A
如图,分别用甲、乙两种形式的滑轮组把重为400N的物体匀速向上提起;已知每个滑轮重20N,忽略绳子的重力以及滑轮与绳子的摩擦,图甲中车对绳子的拉力为________N,图乙中人对绳子的拉力为__________N。
400
210