六年级下册信息技术课件-第三单元 第15课 机器人认路 北师大版(共19张PPT)
文档属性
| 名称 | 六年级下册信息技术课件-第三单元 第15课 机器人认路 北师大版(共19张PPT) |

|
|
| 格式 | pptx | ||
| 文件大小 | 1.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-09-16 19:26:09 | ||
图片预览


文档简介
机器人认路
准备工作
启动通用机器人多语言教学系统
单击“开始”→“程序”→“通用机器人多语言教学系统”→“通用机器人”命令,启动通用机器人多语言教学系统。
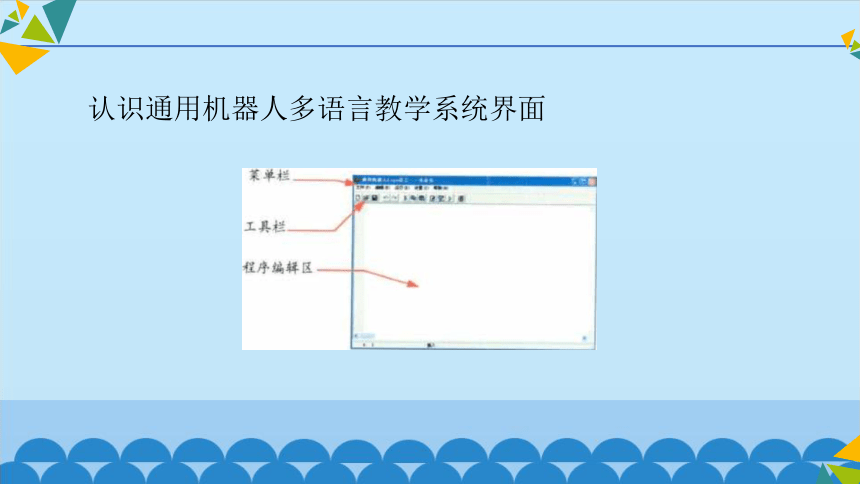
认识通用机器人多语言教学系统界面
配置机器人
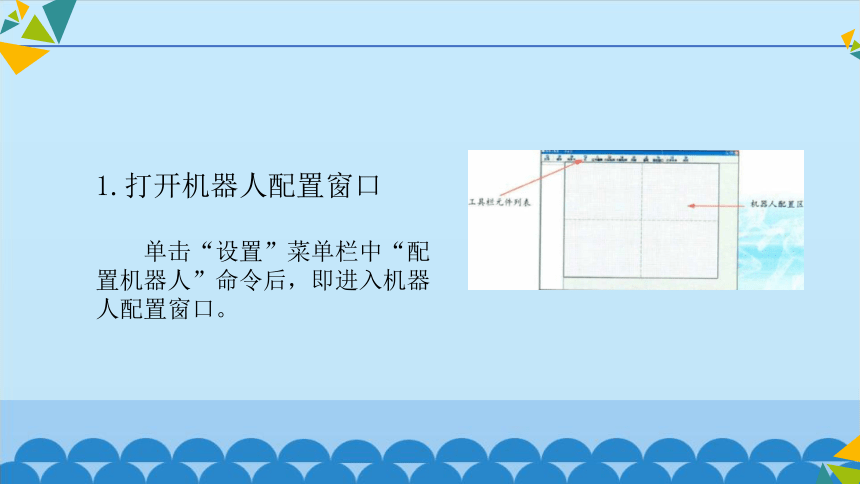
1.打开机器人配置窗口
单击“设置”菜单栏中“配置机器人”命令后,即进入机器人配置窗口。
2.打开要配置的机器人
单击工具栏中的“打开”按钮,找到“通用机器人多语言教学系统”的安装根目录,打开BasicRbt2.set文件,这时在机器人编辑区就会出现要被配置的机器人。
3.添加左、右光敏传感器
单击工具栏中的“光敏检测”按钮后,在机器人的左上角单击鼠标左键,机器人的左上角就会出现一个蓝色圆圈(如右图所示)这样就给机器人加上了“左光敏传感器” 同样再为机器人添加一个“右光敏传感器”。
4.设置传感器属性
在左侧元件列表中选择“光敏检测”,左光敏传感器的圆圈变蓝,单击工具栏中的“属性”按钮,在弹出的“传感器属性”对话框中将安装端口设置为“14”(如右图所示),然后单击“修改”按钮后关闭此窗口。同样对右光敏传感器进行设置,它的设置方法与左光敏传感器的基本相同,只是端口数值应设置为“15”。
5.保存机器人
单击工具栏中“另存为”按钮,将设置好的机器人文件重新命名并保存到你自己的文件夹里。
仿真设置
?? 单击菜单栏里的“设置”→“仿真设置”命令。在弹出的对话框中,将“使用空白场地”前的“V”去掉。然后单击“场地选择”按钮,打开安装路径下“仿真场地”目录里的“黑跑道.fld”文件,这时可以在场地预览区中看见该场地的缩略图。单击“机器人选择”按钮,打开你所配置的机器人文件,此时能在机器人预览区中看见机器人的缩略图。最后单击“确定”按钮,仿真设置结束。
打开程序
?? 单击“文件”菜单栏中的“打开”命令,在安装目录下的“过程举例(logo)”目录中打开“沿黑线行走的轨迹.1go”文件,在“程序编辑区”可以看见此程序的内容。
TO GDHT
FD2 WAIT2
IF (:PIN14=0) AND (:PIN15=l)THEN RT 20
IF (:PIN14=1) AND (:PIN15-0)THEN LT 20
GDHT
END
仿真运行
? ?单击“运行”菜单栏中的“仿真”命令,在弹出的对话框中输入“GDHT”然后单击“确定”按钮(如下图所示),机器人便开始沿着黑色跑道行走了。
拓展与练习
? 请在虚拟环境下,设计赛车跑道。并让机器人按照你设置的跑道运行。
THE END
准备工作
启动通用机器人多语言教学系统
单击“开始”→“程序”→“通用机器人多语言教学系统”→“通用机器人”命令,启动通用机器人多语言教学系统。
认识通用机器人多语言教学系统界面
配置机器人
1.打开机器人配置窗口
单击“设置”菜单栏中“配置机器人”命令后,即进入机器人配置窗口。
2.打开要配置的机器人
单击工具栏中的“打开”按钮,找到“通用机器人多语言教学系统”的安装根目录,打开BasicRbt2.set文件,这时在机器人编辑区就会出现要被配置的机器人。
3.添加左、右光敏传感器
单击工具栏中的“光敏检测”按钮后,在机器人的左上角单击鼠标左键,机器人的左上角就会出现一个蓝色圆圈(如右图所示)这样就给机器人加上了“左光敏传感器” 同样再为机器人添加一个“右光敏传感器”。
4.设置传感器属性
在左侧元件列表中选择“光敏检测”,左光敏传感器的圆圈变蓝,单击工具栏中的“属性”按钮,在弹出的“传感器属性”对话框中将安装端口设置为“14”(如右图所示),然后单击“修改”按钮后关闭此窗口。同样对右光敏传感器进行设置,它的设置方法与左光敏传感器的基本相同,只是端口数值应设置为“15”。
5.保存机器人
单击工具栏中“另存为”按钮,将设置好的机器人文件重新命名并保存到你自己的文件夹里。
仿真设置
?? 单击菜单栏里的“设置”→“仿真设置”命令。在弹出的对话框中,将“使用空白场地”前的“V”去掉。然后单击“场地选择”按钮,打开安装路径下“仿真场地”目录里的“黑跑道.fld”文件,这时可以在场地预览区中看见该场地的缩略图。单击“机器人选择”按钮,打开你所配置的机器人文件,此时能在机器人预览区中看见机器人的缩略图。最后单击“确定”按钮,仿真设置结束。
打开程序
?? 单击“文件”菜单栏中的“打开”命令,在安装目录下的“过程举例(logo)”目录中打开“沿黑线行走的轨迹.1go”文件,在“程序编辑区”可以看见此程序的内容。
TO GDHT
FD2 WAIT2
IF (:PIN14=0) AND (:PIN15=l)THEN RT 20
IF (:PIN14=1) AND (:PIN15-0)THEN LT 20
GDHT
END
仿真运行
? ?单击“运行”菜单栏中的“仿真”命令,在弹出的对话框中输入“GDHT”然后单击“确定”按钮(如下图所示),机器人便开始沿着黑色跑道行走了。
拓展与练习
? 请在虚拟环境下,设计赛车跑道。并让机器人按照你设置的跑道运行。
THE END
同课章节目录