六年级全一册信息技术课件-第十二课 小小机器人我指挥——设计机器人 华中科大版(共16张PPT)
文档属性
| 名称 | 六年级全一册信息技术课件-第十二课 小小机器人我指挥——设计机器人 华中科大版(共16张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 2.9MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-09-16 00:00:00 | ||
图片预览
文档简介
小小机器人我指挥
——设计机器人
轻松学
认识机器人的构成部件
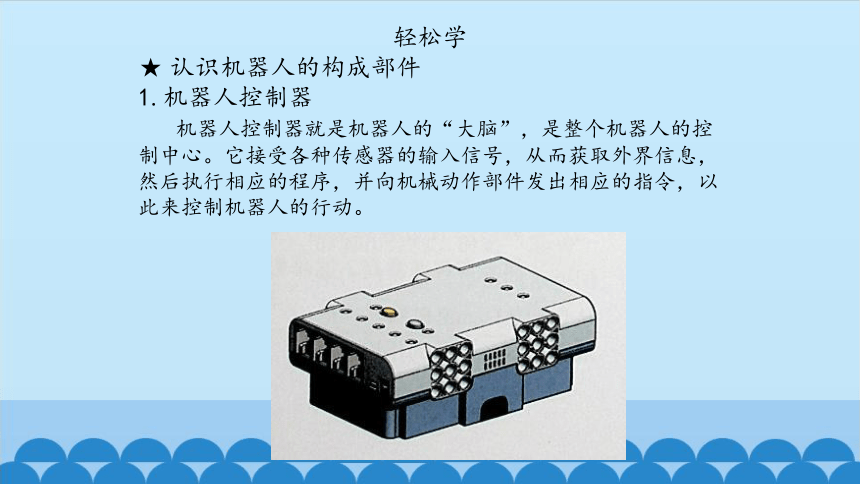
1.机器人控制器
机器人控制器就是机器人的“大脑”,是整个机器人的控制中心。它接受各种传感器的输入信号,从而获取外界信息,然后执行相应的程序,并向机械动作部件发出相应的指令,以此来控制机器人的行动。
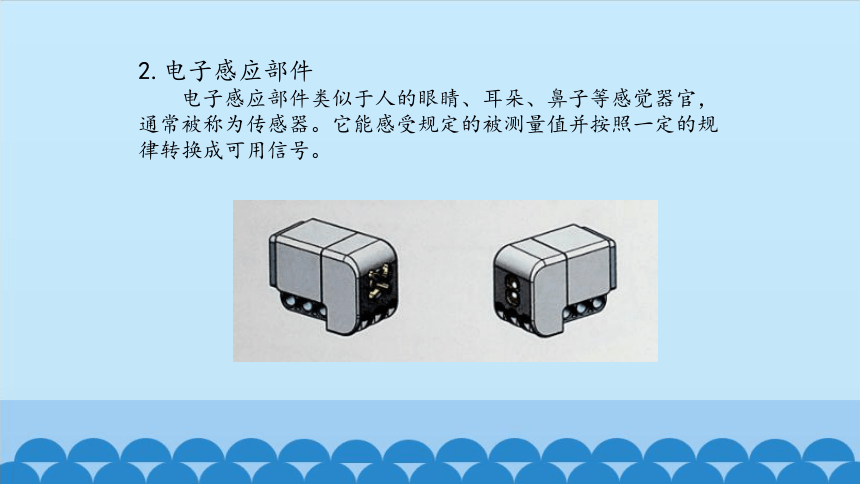
2.电子感应部件
电子感应部件类似于人的眼睛、耳朵、鼻子等感觉器官,通常被称为传感器。它能感受规定的被测量值并按照一定的规律转换成可用信号。
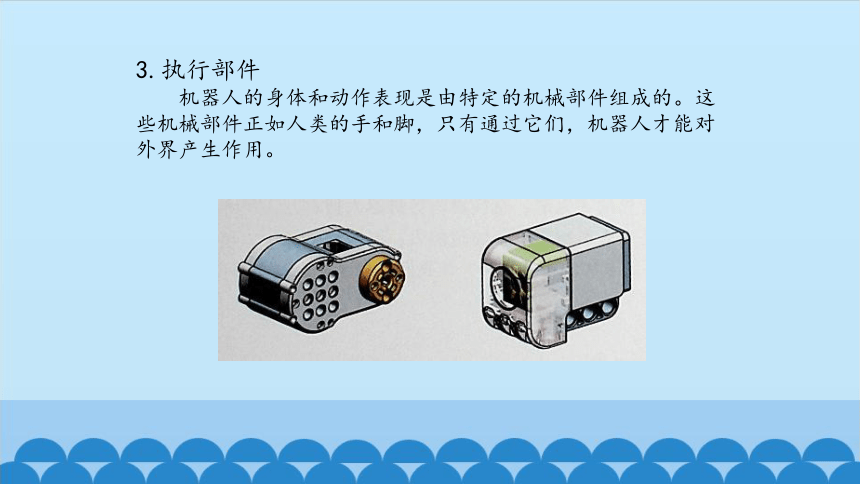
3.执行部件
机器人的身体和动作表现是由特定的机械部件组成的。这些机械部件正如人类的手和脚,只有通过它们,机器人才能对外界产生作用。
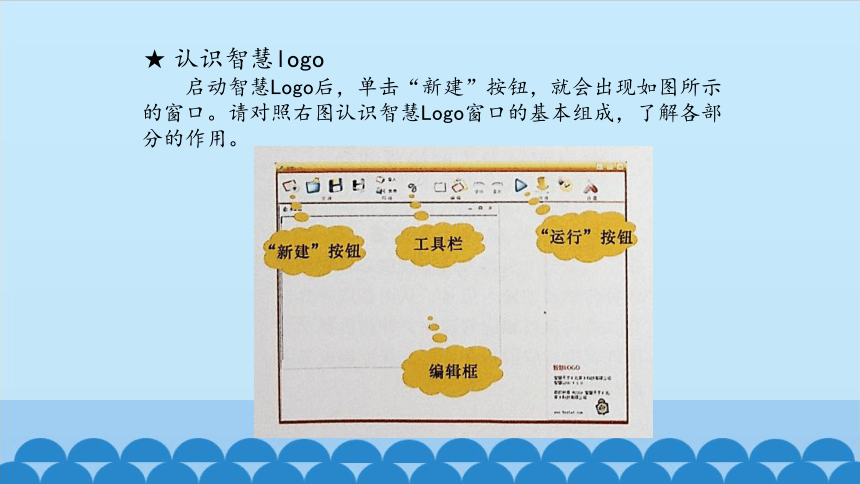
认识智慧logo
启动智慧Logo后,单击“新建”按钮,就会出现如图所示的窗口。请对照右图认识智慧Logo窗口的基本组成,了解各部分的作用。
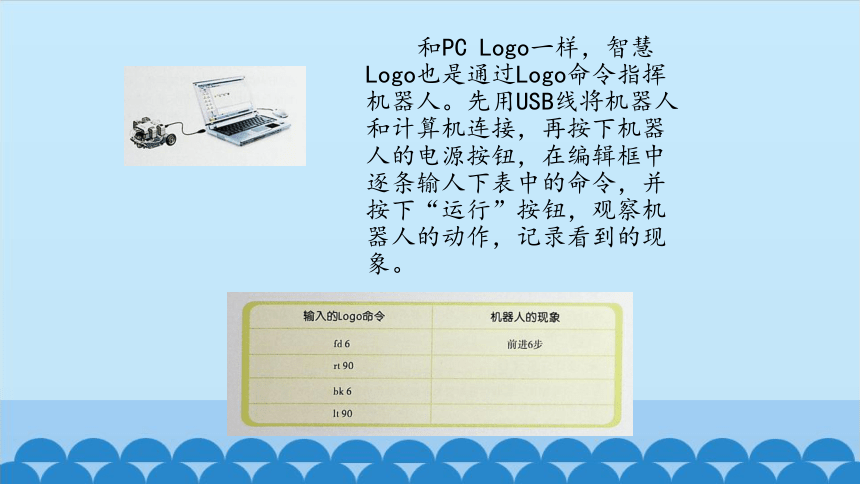
和PC Logo一样,智慧Logo也是通过Logo命令指挥机器人。先用USB线将机器人和计算机连接,再按下机器人的电源按钮,在编辑框中逐条输人下表中的命令,并按下“运行”按钮,观察机器人的动作,记录看到的现象。
软件的开源在科技界有着悠久的历史,开放源码让安全漏洞更易暴露,迭代快速满足用户需求,同时第三方还可以用它来开发新产品。开源硬件是开源电子原型开发平台,比如智慧Logo、Scratch、 Arduino等, 其软硬件设计资料都是全面开放,构成一个可供用户搭建机器人或者各类电子项目的开发环境。
楼道感应灯是一种生活中常见的智能控制装置,它装有亮度传感器和声音传感器,能感应周围环境的声光变化,从而控制灯的开关。现在,我们就利用楼道感应灯的控制原理,设计一台声光感应机器人,并将它的四种控制情况所对应的数字信息显示在数码管上.。数码管是机器人的一个执行部件,能够显示四位数值,方便机器人程序的编写和调试。它使用numdisplay命令显示数值。
确定设计目标
光线亮的时候,无论有声或无声灯都不亮;光线暗的时候,无声灯不亮,有声灯就亮。
设计任务流程
灯是否亮是由亮度和声音
两个传感器的检测数值来决定
的。因此,首先要检测亮度传
感器的数值:如果数值大,表
示光线亮,则灯不亮;如果数
值小,则继续检测声音传感器
的数值,有声音,则灯亮。任
务流程如右图所示。
搭建机器人
将亮度传感器、声音传感器、三色灯和数码管连接到控制器上,如右图所所示。亮度传感器连接到1号输入端口,声音传感器连接到2号输入端口,三色灯连接到输出端口C,数码管连接到输出端口D。
编写程序
打开智慧Logo软件,先新建一个程序,然后按照任务流程,在编辑框中编写程序,如右图所示。
程序编写完成后,单击“保存”按钮,将程序命名为“声光感应机器人”,保存文件。
测试程序
运行机器人中的程序,并不断变换环境光的亮度和声音的大小,检测是否达到了预期的效果。
while1[命令组]语句用来表示一个无限循环过程;
checkbright语句用来检测亮度传感器的数值,范围是1~100,数值越大表示亮度越高。
checksound语句用来检测声音传感器的数值,范围是1~100,数值越大表示声音越强。
互动学
通过本节课的学习,我们我们初步认识了机器人,熟悉了机器人的设计、制作流程,知道如何设计声光感应机器人。请大家对照下表进行评价,将得到的旗涂成红色。
今天的学习到此结束,大家都学会了么?
谢谢
——设计机器人
轻松学
认识机器人的构成部件
1.机器人控制器
机器人控制器就是机器人的“大脑”,是整个机器人的控制中心。它接受各种传感器的输入信号,从而获取外界信息,然后执行相应的程序,并向机械动作部件发出相应的指令,以此来控制机器人的行动。
2.电子感应部件
电子感应部件类似于人的眼睛、耳朵、鼻子等感觉器官,通常被称为传感器。它能感受规定的被测量值并按照一定的规律转换成可用信号。
3.执行部件
机器人的身体和动作表现是由特定的机械部件组成的。这些机械部件正如人类的手和脚,只有通过它们,机器人才能对外界产生作用。
认识智慧logo
启动智慧Logo后,单击“新建”按钮,就会出现如图所示的窗口。请对照右图认识智慧Logo窗口的基本组成,了解各部分的作用。
和PC Logo一样,智慧Logo也是通过Logo命令指挥机器人。先用USB线将机器人和计算机连接,再按下机器人的电源按钮,在编辑框中逐条输人下表中的命令,并按下“运行”按钮,观察机器人的动作,记录看到的现象。
软件的开源在科技界有着悠久的历史,开放源码让安全漏洞更易暴露,迭代快速满足用户需求,同时第三方还可以用它来开发新产品。开源硬件是开源电子原型开发平台,比如智慧Logo、Scratch、 Arduino等, 其软硬件设计资料都是全面开放,构成一个可供用户搭建机器人或者各类电子项目的开发环境。
楼道感应灯是一种生活中常见的智能控制装置,它装有亮度传感器和声音传感器,能感应周围环境的声光变化,从而控制灯的开关。现在,我们就利用楼道感应灯的控制原理,设计一台声光感应机器人,并将它的四种控制情况所对应的数字信息显示在数码管上.。数码管是机器人的一个执行部件,能够显示四位数值,方便机器人程序的编写和调试。它使用numdisplay命令显示数值。
确定设计目标
光线亮的时候,无论有声或无声灯都不亮;光线暗的时候,无声灯不亮,有声灯就亮。
设计任务流程
灯是否亮是由亮度和声音
两个传感器的检测数值来决定
的。因此,首先要检测亮度传
感器的数值:如果数值大,表
示光线亮,则灯不亮;如果数
值小,则继续检测声音传感器
的数值,有声音,则灯亮。任
务流程如右图所示。
搭建机器人
将亮度传感器、声音传感器、三色灯和数码管连接到控制器上,如右图所所示。亮度传感器连接到1号输入端口,声音传感器连接到2号输入端口,三色灯连接到输出端口C,数码管连接到输出端口D。
编写程序
打开智慧Logo软件,先新建一个程序,然后按照任务流程,在编辑框中编写程序,如右图所示。
程序编写完成后,单击“保存”按钮,将程序命名为“声光感应机器人”,保存文件。
测试程序
运行机器人中的程序,并不断变换环境光的亮度和声音的大小,检测是否达到了预期的效果。
while1[命令组]语句用来表示一个无限循环过程;
checkbright语句用来检测亮度传感器的数值,范围是1~100,数值越大表示亮度越高。
checksound语句用来检测声音传感器的数值,范围是1~100,数值越大表示声音越强。
互动学
通过本节课的学习,我们我们初步认识了机器人,熟悉了机器人的设计、制作流程,知道如何设计声光感应机器人。请大家对照下表进行评价,将得到的旗涂成红色。
今天的学习到此结束,大家都学会了么?
谢谢
同课章节目录