六年级下册信息技术课件-第二单元 第5课 穿越减速带 辽师大版(共16张PPT)
文档属性
| 名称 | 六年级下册信息技术课件-第二单元 第5课 穿越减速带 辽师大版(共16张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 1.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-09-21 00:00:00 | ||
图片预览
文档简介
穿越减速带
在公路收费站、小区里、学校门口,我们经常会见到马路上有减速带,这是为了让司机减速慢行而设置的。在这些地段减速慢行是一种必要的安全措施。今天我们就来设计一个机器人,使其能够在遇到减速带时自动降低速度。
设计师
光电传感器具有检测颜色的能力,安装了光电传感器的机器人在通过一段与道路颜色不同的块状减速带时能够自动减速慢行,越过减速带后速度恢复正常。我们利用各种结构件搭建一款双马达驱动的轮式机器人汽车,通过编写光电传感器程序,让机器人汽车在运行中遇到深色地面时减速慢行。
1
搭建轮式机器人
2
程序编写
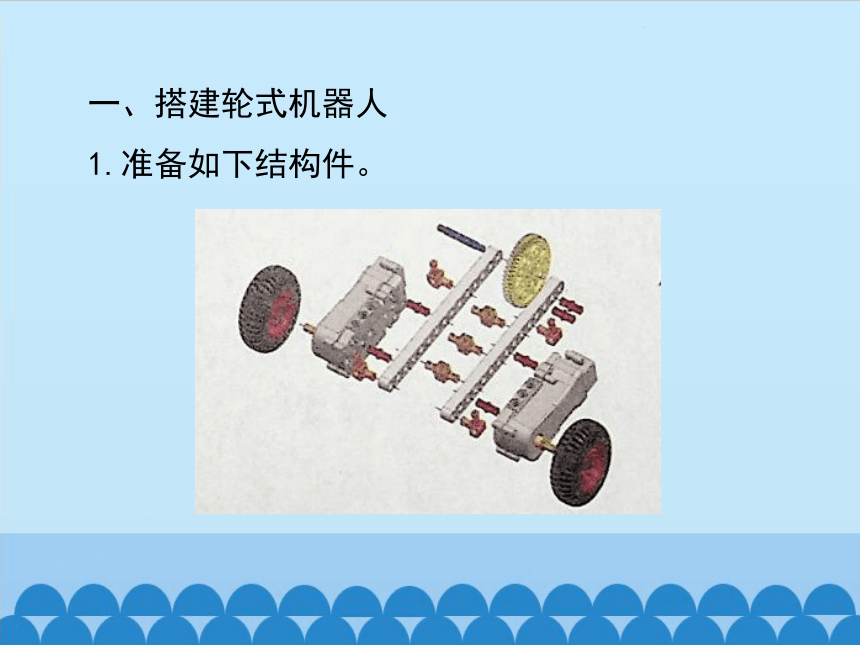
一、搭建轮式机器人
1.准备如下结构件。
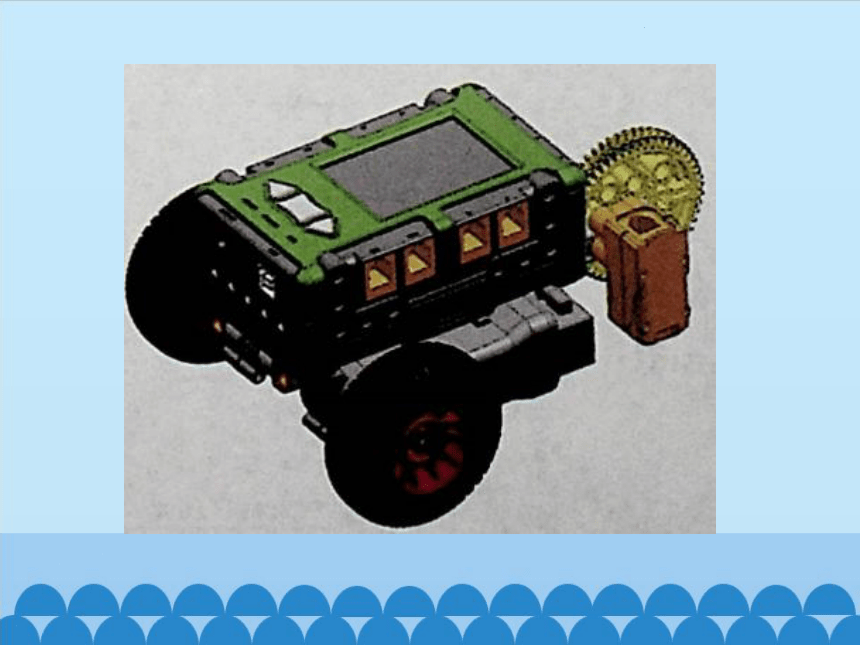
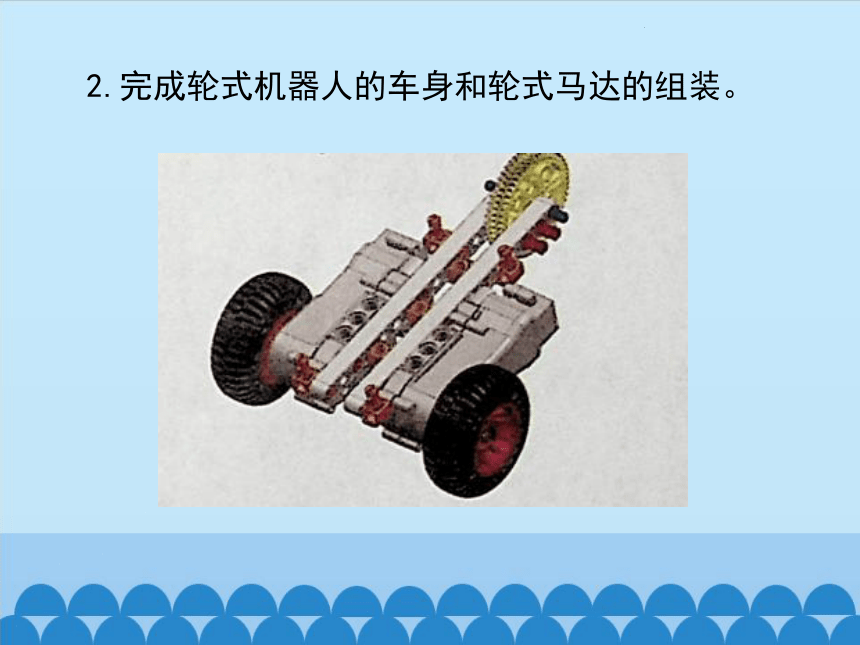
2.完成轮式机器人的车身和轮式马达的组装。
3.安装主控器和光电传感器,将光电传感器和两个马达通过连接线与主控器进行连接,光电传感器连接在主控器上的P1端口,而两个马达则分别连接在M1和M2端口。这样,机器人模型就搭建完成了。
二、程序编写
1.打开机器人快车编程软件,单击【文件】→【新建】,在弹出的窗口中,选择文件存储的位置,并把文件命名为“jiansudai”,然后单击【确定】。
2.从【执行模块】库中拖拽两个“马达”图标到编辑区,然后在【光电传感器】库中,将“等待光电值小于”图标拖拽到编辑区。
3.右键单击“马达”图标,在打开的属性窗口设置两个马达端口分别为“M1”“M2”,马达的速度均为“60”。
右键单击“等待光电值小于”图标,在打开的属性窗口中将界线值由默认的“1000”改成我们计算出的阈值。(这里仍以“1000”为例)
4.运用同样的方法,依次再将两个“马达”图标和“等待光电值大于”图标拖拽到编辑区并进行连接。此时马达的速度设置为“30”,“等待光电值大于”图标中的界线值依旧改成阈值。
5.添加上循环语句,使程序能够反复运行。
6.程序编写完毕后,单击【文件】→【保存】,对所写的程序进行保存。然后,依次单击工具栏中的【编译】和【下载】,根据【下载】提示框中的说明,将主控器与电脑通过USB进行连接,启动主控器电源,按下主控器上的“Download”键,便可将程序传输到主控器中。
谢 谢
在公路收费站、小区里、学校门口,我们经常会见到马路上有减速带,这是为了让司机减速慢行而设置的。在这些地段减速慢行是一种必要的安全措施。今天我们就来设计一个机器人,使其能够在遇到减速带时自动降低速度。
设计师
光电传感器具有检测颜色的能力,安装了光电传感器的机器人在通过一段与道路颜色不同的块状减速带时能够自动减速慢行,越过减速带后速度恢复正常。我们利用各种结构件搭建一款双马达驱动的轮式机器人汽车,通过编写光电传感器程序,让机器人汽车在运行中遇到深色地面时减速慢行。
1
搭建轮式机器人
2
程序编写
一、搭建轮式机器人
1.准备如下结构件。
2.完成轮式机器人的车身和轮式马达的组装。
3.安装主控器和光电传感器,将光电传感器和两个马达通过连接线与主控器进行连接,光电传感器连接在主控器上的P1端口,而两个马达则分别连接在M1和M2端口。这样,机器人模型就搭建完成了。
二、程序编写
1.打开机器人快车编程软件,单击【文件】→【新建】,在弹出的窗口中,选择文件存储的位置,并把文件命名为“jiansudai”,然后单击【确定】。
2.从【执行模块】库中拖拽两个“马达”图标到编辑区,然后在【光电传感器】库中,将“等待光电值小于”图标拖拽到编辑区。
3.右键单击“马达”图标,在打开的属性窗口设置两个马达端口分别为“M1”“M2”,马达的速度均为“60”。
右键单击“等待光电值小于”图标,在打开的属性窗口中将界线值由默认的“1000”改成我们计算出的阈值。(这里仍以“1000”为例)
4.运用同样的方法,依次再将两个“马达”图标和“等待光电值大于”图标拖拽到编辑区并进行连接。此时马达的速度设置为“30”,“等待光电值大于”图标中的界线值依旧改成阈值。
5.添加上循环语句,使程序能够反复运行。
6.程序编写完毕后,单击【文件】→【保存】,对所写的程序进行保存。然后,依次单击工具栏中的【编译】和【下载】,根据【下载】提示框中的说明,将主控器与电脑通过USB进行连接,启动主控器电源,按下主控器上的“Download”键,便可将程序传输到主控器中。
谢 谢
同课章节目录