六年级下册信息技术课件-第二单元 第6课 走轨迹的机器人 辽师大版(共14张PPT)
文档属性
| 名称 | 六年级下册信息技术课件-第二单元 第6课 走轨迹的机器人 辽师大版(共14张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 1.1MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-09-21 00:00:00 | ||
图片预览

文档简介
走轨迹的机器人
无论是汽车在公路上行驶,还是人在人行道上走路,日常出行时,我们都需要遵守交通规则,机器人也不例外。本节课我们要让机器人能够自动沿着道路运行。
1
指南针
2
设计师
3
小能手
指南针
?熟练使用光电传感器编程;
?了解单光电走轨迹的思路和方法
设计师
上节课我们利用光电传感器程序使机器人在遇到减速带时减速运行。那么如果想让机器人能够沿着固定轨迹运行,就需要重新编写程序。下面,我们一起试着完成这个任务吧!
小能手
本节课我们继续使用上一节课搭建出来的轮式机器人模型,通过对程序进行重新设计来实现机器人沿着轨迹运行的功能。现在,我们就从程序设计部分开始挑战吧!
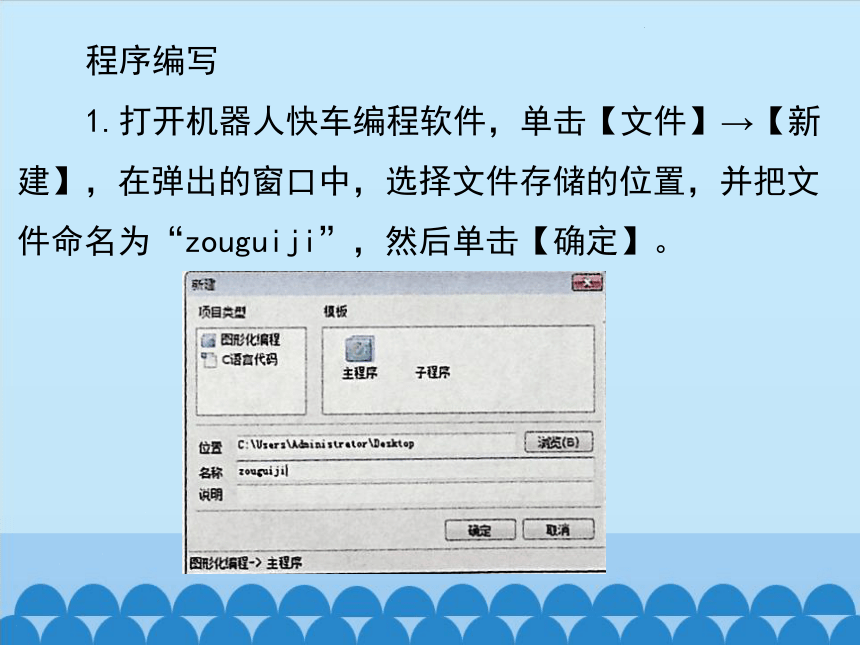
程序编写
1.打开机器人快车编程软件,单击【文件】→【新建】,在弹出的窗口中,选择文件存储的位置,并把文件命名为“zouguiji”,然后单击【确定】。
2.从【执行模块】库中拖拽两个“马达”图标到编辑区,然后在【光电传感器】库中,将“等待光电值小于”图标拖拽到编辑区。
3.右键单击“马达”图标,在打开的属性窗口设置两个马达端口分别为“M1”“M2”,马达的速度Ml为“40”,M2为“0”。
右键单击“等待光电值小于”图标,在打开的属性窗口将界线值由默认的“1000”改成我们算出的阈值。(这里仍以“1000”为例)
4.运用同样的方法,依次再将两个“马达”图标和“等待光电值大于”图标拖拽到编辑区并进行连接。此时设置马达的速度M1为“0”,M2为“40”,“等待光电值大于”图标中的界线值依旧改成阈值。
5.添加循环语句,使程序能够反复运行。
6.程序编写完毕后,单击【文件】→【保存】,对程序进行保存。然后,依次单击工具栏中的【编译】和【下载】,根据【下载】提示框中的说明,将主控器与电脑通过USB进行连接,启动主控器电源,按下主控器上的“Download”按键,便可将程序传输到主控器中。
谢 谢
无论是汽车在公路上行驶,还是人在人行道上走路,日常出行时,我们都需要遵守交通规则,机器人也不例外。本节课我们要让机器人能够自动沿着道路运行。
1
指南针
2
设计师
3
小能手
指南针
?熟练使用光电传感器编程;
?了解单光电走轨迹的思路和方法
设计师
上节课我们利用光电传感器程序使机器人在遇到减速带时减速运行。那么如果想让机器人能够沿着固定轨迹运行,就需要重新编写程序。下面,我们一起试着完成这个任务吧!
小能手
本节课我们继续使用上一节课搭建出来的轮式机器人模型,通过对程序进行重新设计来实现机器人沿着轨迹运行的功能。现在,我们就从程序设计部分开始挑战吧!
程序编写
1.打开机器人快车编程软件,单击【文件】→【新建】,在弹出的窗口中,选择文件存储的位置,并把文件命名为“zouguiji”,然后单击【确定】。
2.从【执行模块】库中拖拽两个“马达”图标到编辑区,然后在【光电传感器】库中,将“等待光电值小于”图标拖拽到编辑区。
3.右键单击“马达”图标,在打开的属性窗口设置两个马达端口分别为“M1”“M2”,马达的速度Ml为“40”,M2为“0”。
右键单击“等待光电值小于”图标,在打开的属性窗口将界线值由默认的“1000”改成我们算出的阈值。(这里仍以“1000”为例)
4.运用同样的方法,依次再将两个“马达”图标和“等待光电值大于”图标拖拽到编辑区并进行连接。此时设置马达的速度M1为“0”,M2为“40”,“等待光电值大于”图标中的界线值依旧改成阈值。
5.添加循环语句,使程序能够反复运行。
6.程序编写完毕后,单击【文件】→【保存】,对程序进行保存。然后,依次单击工具栏中的【编译】和【下载】,根据【下载】提示框中的说明,将主控器与电脑通过USB进行连接,启动主控器电源,按下主控器上的“Download”按键,便可将程序传输到主控器中。
谢 谢
同课章节目录