六年级下册信息技术课件-第二单元 第2课 做体操的机器人 辽师大版(共13张PPT)
文档属性
| 名称 | 六年级下册信息技术课件-第二单元 第2课 做体操的机器人 辽师大版(共13张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 1.2MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-09-21 20:55:27 | ||
图片预览
文档简介
做体操的机器人
大家都见过体操运动员的表演吧。我们的机器人也会做体操,想知道它是怎样做体操的吗?今天,我们就来搭建会做体操的机器人。
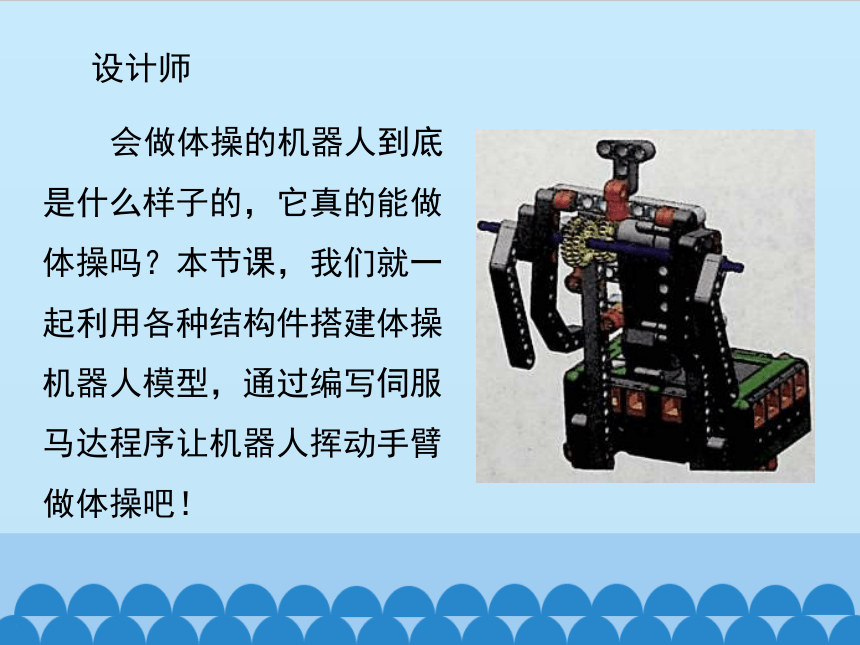
设计师
会做体操的机器人到底是什么样子的,它真的能做体操吗?本节课,我们就一起利用各种结构件搭建体操机器人模型,通过编写伺服马达程序让机器人挥动手臂做体操吧!
1
搭建体操机器人模型
2
程序编写
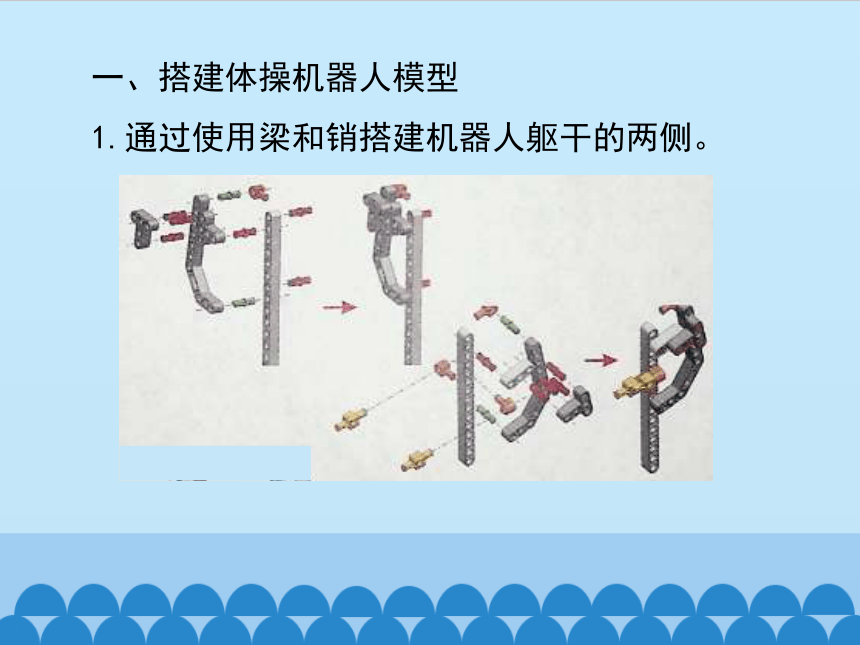
一、搭建体操机器人模型
1.通过使用梁和销搭建机器人躯干的两侧。
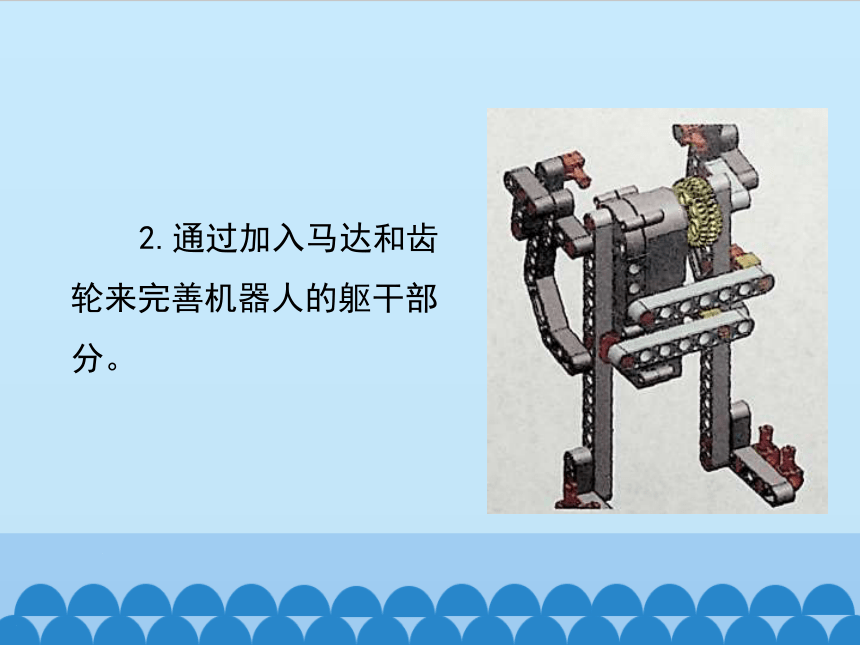
2.通过加入马达和齿轮来完善机器人的躯干部分。
3.下面开始进行头部、手臂和腿部的安装,腿部用主控器代替。安装手臂时需要用到一个长轴。马达通过连接线与主控器的M1端口相连,这样一个会做体操的机器人模型就搭建完成了。
二、程序编写
1.打开机器人快车编程软件,新建一个名为“ticao”的项目程序文件。
2.在【执行模块】中,选择“伺服马达”图标,将其拖拽到编辑区,再复制一次。在第一处“伺服马达”图标上单击右键打开属性窗口,设定端口为“M1”,速度为“50”,角度为“180”;在第二处“伺服马达”图标上单击右键打开属性窗口,设定端口为“M1”,速度为“-50”,角度为“180”。
3.编写完整的动作程序。“伺服马达”前转180度,然后向后转180度,带动小人手臂往复运动。
4.程序完成后,进行保存并下载到主控器中。
拓展园
伺服马达又称伺服电机、舵机,属于一种集电机控制、伺服驱动、总线式通信接口为一体的集成单元。主要用于微型机器人的关节、轮子、履带驱动,也可以用于其他相关位置或角度控制的场合。具体的应用例子有:人形机器人(如大名鼎鼎的Nao)、工厂流水线中的机械手、航模中的方向控制单元。
谢 谢
大家都见过体操运动员的表演吧。我们的机器人也会做体操,想知道它是怎样做体操的吗?今天,我们就来搭建会做体操的机器人。
设计师
会做体操的机器人到底是什么样子的,它真的能做体操吗?本节课,我们就一起利用各种结构件搭建体操机器人模型,通过编写伺服马达程序让机器人挥动手臂做体操吧!
1
搭建体操机器人模型
2
程序编写
一、搭建体操机器人模型
1.通过使用梁和销搭建机器人躯干的两侧。
2.通过加入马达和齿轮来完善机器人的躯干部分。
3.下面开始进行头部、手臂和腿部的安装,腿部用主控器代替。安装手臂时需要用到一个长轴。马达通过连接线与主控器的M1端口相连,这样一个会做体操的机器人模型就搭建完成了。
二、程序编写
1.打开机器人快车编程软件,新建一个名为“ticao”的项目程序文件。
2.在【执行模块】中,选择“伺服马达”图标,将其拖拽到编辑区,再复制一次。在第一处“伺服马达”图标上单击右键打开属性窗口,设定端口为“M1”,速度为“50”,角度为“180”;在第二处“伺服马达”图标上单击右键打开属性窗口,设定端口为“M1”,速度为“-50”,角度为“180”。
3.编写完整的动作程序。“伺服马达”前转180度,然后向后转180度,带动小人手臂往复运动。
4.程序完成后,进行保存并下载到主控器中。
拓展园
伺服马达又称伺服电机、舵机,属于一种集电机控制、伺服驱动、总线式通信接口为一体的集成单元。主要用于微型机器人的关节、轮子、履带驱动,也可以用于其他相关位置或角度控制的场合。具体的应用例子有:人形机器人(如大名鼎鼎的Nao)、工厂流水线中的机械手、航模中的方向控制单元。
谢 谢
同课章节目录