六年级下册信息技术课件-第9课 认识机器人 川教版(共18张PPT)
文档属性
| 名称 | 六年级下册信息技术课件-第9课 认识机器人 川教版(共18张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 2.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 川教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-09-30 00:00:00 | ||
图片预览

文档简介
认识机器人
一、机器人的“大脑”
机器人的“大脑”就是我们所熟悉的电脑,它实际是一个微型计算机被安装在机器人的主板上。当我们要向机器人发出指令时,首先把指令输入每计算机,再用一条专门的“通讯下载线”让计算机与机器人实现通讯连接通过简单的操作把指令传送给机器人的“大脑”,也就是CPU,CPU再驱动机器人各个“器官”完成人们的指令。
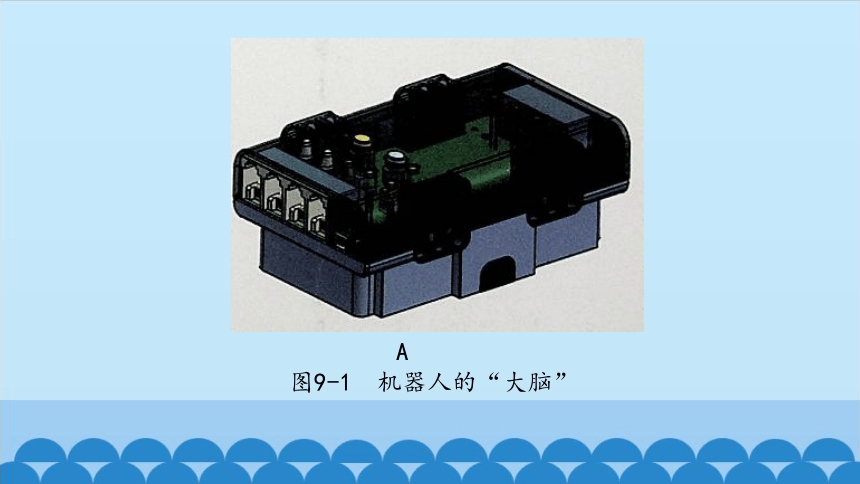
A
图9-1 机器人的“大脑”
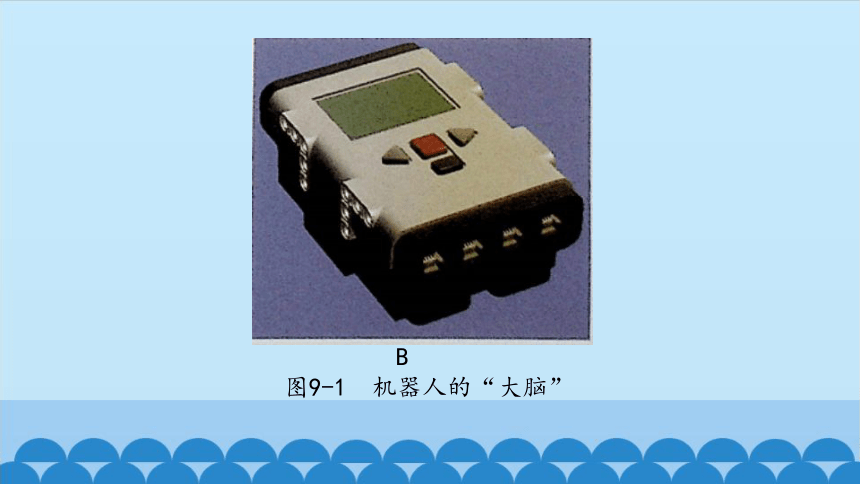
B
图9-1 机器人的“大脑”
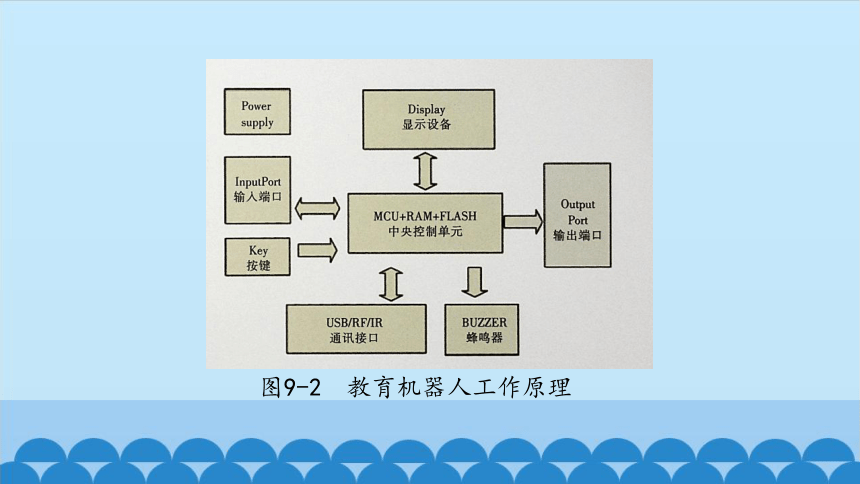
教育机器人与其他应用机器人一样有一个中央控制器,所有的控制处理、加工、运算都是在这里完成的,这就相当于机器人大脑了。
图9-2 教育机器人工作原理
A
B
图9-3 机器人与计算机实现通讯下载的连接线与红外线发射器
二、机器人的“手“和“脚”
人有躯干、手、脚,所以我们能做事、行走和奔跑。机器人同样有躯干手和脚,只是它们通常由各种标准化的部件所代替。图9-4是机器人常用的支撑和连接部件,利用这些标准化的部件,我们可以根据需要拼装成不同的机器人。
图9-4 机器人的支撑、连接部件
图9-5 个性化的机器人
图9-6 机器人的马达
马达是使机器人运动的重要部件。图9-6是机器人常用的几种马达,今后我们会用到它们。
光电传感器 触动传感器 超声波传感器 火焰传感器
图9-7 机器人的传感器
图9-7是机器人的各种传感器,它们能感知外界是否有障碍物、温度的高低和光的变化等。
三、机器人的“眼睛”
图9-8 红外线传感器
图9-8是一种安装在机器人身上的红外线传感器。为了实现不同方向的检测,我们可以把它安装在不同的侧面。
图9-9 颜色传感器
为了让机器人识别颜色,我们还可以在机器人身上安装颜色传感器(图9-9)。有了颜色传感器,机器人就能识别某种颜色的路线了。
四、机器人也能“听”会“说”
图9-10机器人的“耳”和“嘴”
五、机器人的能源
机器人的能源主要来自电能和光能。普通教育机器人(用于教学的机器人)多数用的是可充电电池或普通干电池,机器人所需的一切能源都是由电池提供。现在,有的机器人提供了外接开关电源,它可以直接从220伏交流电源插座取电,这样机器人工作时更加绿色环保。(图9-11)
图9-11 机器人的“心脏”
谢 谢
一、机器人的“大脑”
机器人的“大脑”就是我们所熟悉的电脑,它实际是一个微型计算机被安装在机器人的主板上。当我们要向机器人发出指令时,首先把指令输入每计算机,再用一条专门的“通讯下载线”让计算机与机器人实现通讯连接通过简单的操作把指令传送给机器人的“大脑”,也就是CPU,CPU再驱动机器人各个“器官”完成人们的指令。
A
图9-1 机器人的“大脑”
B
图9-1 机器人的“大脑”
教育机器人与其他应用机器人一样有一个中央控制器,所有的控制处理、加工、运算都是在这里完成的,这就相当于机器人大脑了。
图9-2 教育机器人工作原理
A
B
图9-3 机器人与计算机实现通讯下载的连接线与红外线发射器
二、机器人的“手“和“脚”
人有躯干、手、脚,所以我们能做事、行走和奔跑。机器人同样有躯干手和脚,只是它们通常由各种标准化的部件所代替。图9-4是机器人常用的支撑和连接部件,利用这些标准化的部件,我们可以根据需要拼装成不同的机器人。
图9-4 机器人的支撑、连接部件
图9-5 个性化的机器人
图9-6 机器人的马达
马达是使机器人运动的重要部件。图9-6是机器人常用的几种马达,今后我们会用到它们。
光电传感器 触动传感器 超声波传感器 火焰传感器
图9-7 机器人的传感器
图9-7是机器人的各种传感器,它们能感知外界是否有障碍物、温度的高低和光的变化等。
三、机器人的“眼睛”
图9-8 红外线传感器
图9-8是一种安装在机器人身上的红外线传感器。为了实现不同方向的检测,我们可以把它安装在不同的侧面。
图9-9 颜色传感器
为了让机器人识别颜色,我们还可以在机器人身上安装颜色传感器(图9-9)。有了颜色传感器,机器人就能识别某种颜色的路线了。
四、机器人也能“听”会“说”
图9-10机器人的“耳”和“嘴”
五、机器人的能源
机器人的能源主要来自电能和光能。普通教育机器人(用于教学的机器人)多数用的是可充电电池或普通干电池,机器人所需的一切能源都是由电池提供。现在,有的机器人提供了外接开关电源,它可以直接从220伏交流电源插座取电,这样机器人工作时更加绿色环保。(图9-11)
图9-11 机器人的“心脏”
谢 谢