六年级全一册信息技术课件-第十三课 小小机器人我指挥——机器人行走 华中科大版(共12张PPT)
文档属性
| 名称 | 六年级全一册信息技术课件-第十三课 小小机器人我指挥——机器人行走 华中科大版(共12张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 3.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-10-02 00:00:00 | ||
图片预览
文档简介
小小机器人我指挥
——机器人行走
目前,大多数机器人都采用轮式行走的结构。现在,我们就给机器人配上马达、装上轮子,让它动起来。通过设置马达的转动速度、转动角度和转动圈数等参数,实现对机器人行走方式的精确控制。
轻松学
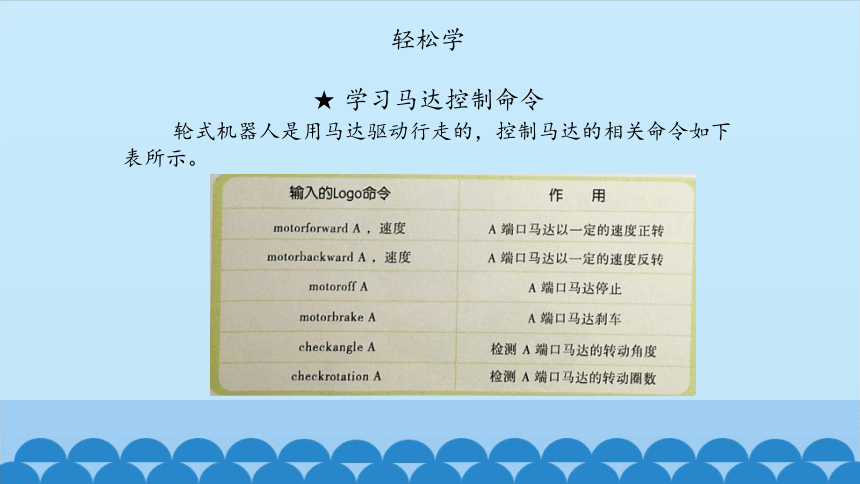
学习马达控制命令
轮式机器人是用马达驱动行走的,控制马达的相关命令如下表所示。
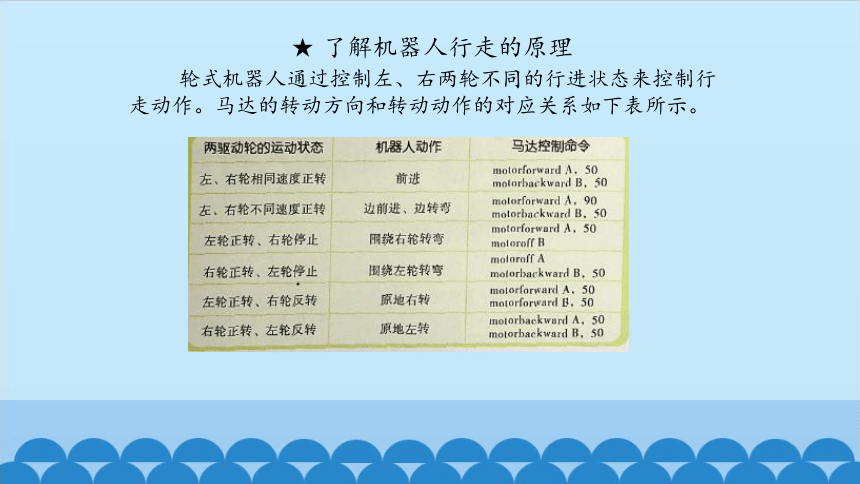
了解机器人行走的原理
轮式机器人通过控制左、右两轮不同的行进状态来控制行走动作。马达的转动方向和转动动作的对应关系如下表所示。
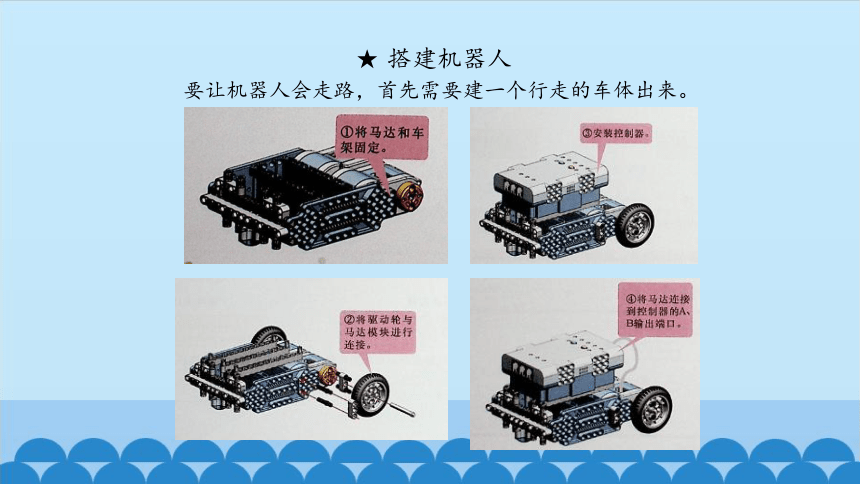
搭建机器人
要让机器人会走路,首先需要建一个行走的车体出来。
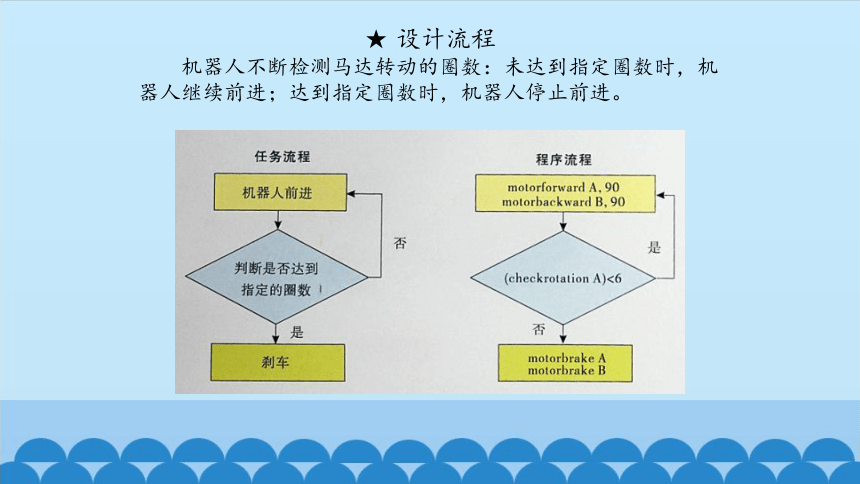
设计流程
机器人不断检测马达转动的圈数:未达到指定圈数时,机器人继续前进;达到指定圈数时,机器人停止前进。
编写程序
根据程序流程图编写程序。
测试程序
程序编写完完成后,下载到机器人控制器中,按下控制器运行按钮,机器人前进马达转5圈的距离后刹车,符合设计要求。
试一试
用马达控制命令编写程序,实现机器人原地旋转或走圆形。
互动评
通过本节课的学习,我们学会了如何让机器人行走。请大家对照下表进行评价,将得到的旗涂成红色。
今天的学习到此结束,大家都学会了么?
谢 谢
——机器人行走
目前,大多数机器人都采用轮式行走的结构。现在,我们就给机器人配上马达、装上轮子,让它动起来。通过设置马达的转动速度、转动角度和转动圈数等参数,实现对机器人行走方式的精确控制。
轻松学
学习马达控制命令
轮式机器人是用马达驱动行走的,控制马达的相关命令如下表所示。
了解机器人行走的原理
轮式机器人通过控制左、右两轮不同的行进状态来控制行走动作。马达的转动方向和转动动作的对应关系如下表所示。
搭建机器人
要让机器人会走路,首先需要建一个行走的车体出来。
设计流程
机器人不断检测马达转动的圈数:未达到指定圈数时,机器人继续前进;达到指定圈数时,机器人停止前进。
编写程序
根据程序流程图编写程序。
测试程序
程序编写完完成后,下载到机器人控制器中,按下控制器运行按钮,机器人前进马达转5圈的距离后刹车,符合设计要求。
试一试
用马达控制命令编写程序,实现机器人原地旋转或走圆形。
互动评
通过本节课的学习,我们学会了如何让机器人行走。请大家对照下表进行评价,将得到的旗涂成红色。
今天的学习到此结束,大家都学会了么?
谢 谢
同课章节目录