六年级全一册信息技术课件-第十四课 小小机器人我指挥——机器人认路 华中科大版(共13张PPT)
文档属性
| 名称 | 六年级全一册信息技术课件-第十四课 小小机器人我指挥——机器人认路 华中科大版(共13张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 2.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-10-02 00:00:00 | ||
图片预览

文档简介
小小机器人我指挥
——机器人认路
轻松学
了解生活中光电传感器的应用
洗手时,在自动感应水龙头下伸出手,水就会自动地流出来;走近商场的大门,自动感应门就会自动地打开…这些都是光电传感器的功劳。光电传感器可以感知信息,检测光信号的特征和强度,并将它转换为电信号。
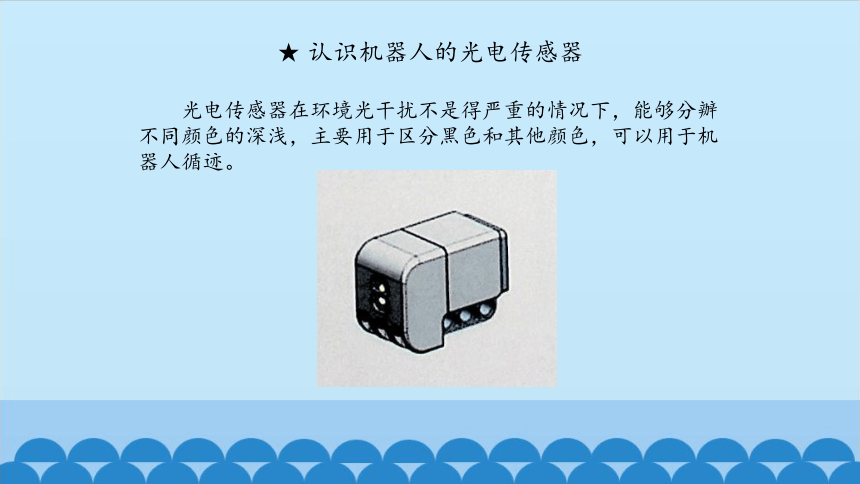
认识机器人的光电传感器
光电传感器在环境光干扰不是得严重的情况下,能够分辦不同颜色的深浅,主要用于区分黑色和其他颜色,可以用于机器人循迹。
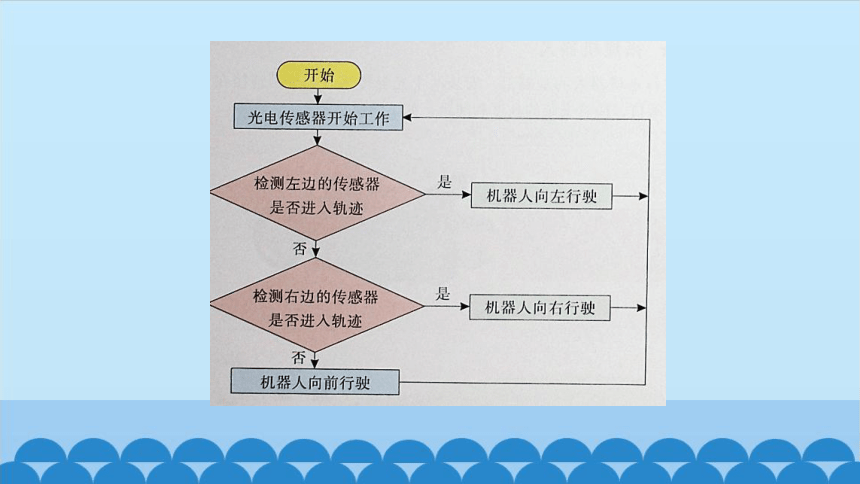
了解机器人循迹原理
光电传感器就像机器人的眼晴,机器人就是利用它来区分不同颜色,完成沿固定轨迹行走的。在机器人的前方安装两个光电传感器,安装时要注意靠近地面、高度一致,且相互之间距离要略大于轨迹的宽度。当左边传感器进入轨迹时,机器人向左行驶让它离开轨迹;当右边传感器进入轨迹时,机器人向右行驶让它离开轨迹;当两个传感器都不在轨迹之内时机器人向前行驶。机器人沿固定轨迹行驶的流程图如下图所示。
快乐做
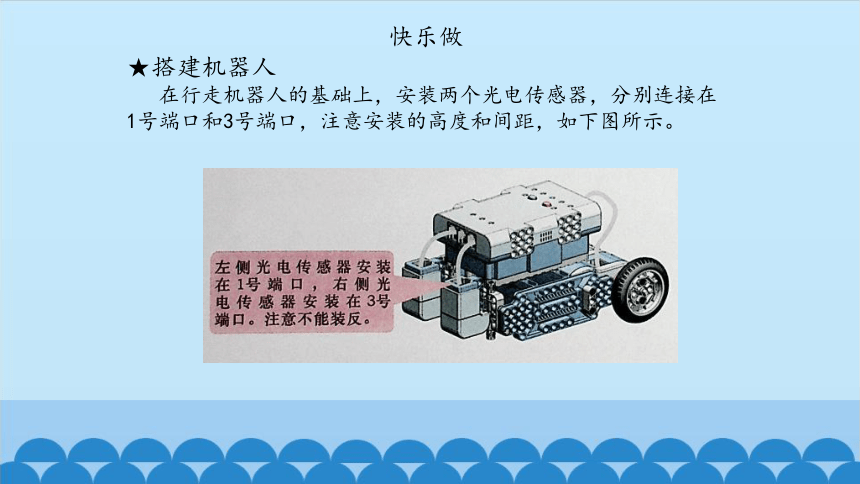
搭建机器人
在行走机器人的基础上,安装两个光电传感器,分别连接在1号端口和3号端口,注意安装的高度和间距,如下图所示。
编写程序
根据程序流程图编写出机器人循迹程序。
光电传感器检测颜色深浅的命令为checklight1,命令后的1表示端口,要和机器人连线对应。检测的数值范围是1~ 100,数值越大表明检测到的颜色越浅,数值越小表明检测到的颜色越深。
程序中的C1和C3是两个变量,用于存储光电传感器的比较值,这样在比较值发生变化的时候,只需要修改程序中的一个位置就可以了。
用“and"连接“( checklight 1) >C1”和“( checklight 3)> C3”两个条件进行判断,只有当这两个条件同时满足时,判断条件才成立,只要有一个条件不满足, 判断条件就不成立。
测试程序
机器人运行程序之前,要注意将机器人的两个光电传感器放在轨迹两侧,然后按下启动按钮。如果不能完成循迹任务,可以根据环境调整C1和C3的数值。
互动评
通过本节课的学习,我们学会了如何让机器人沿固定轨迹行走。请大家对照下表进行评价,将得到的旗涂成红色。
今天的学习到此结束,大家都学会了么?
谢谢
——机器人认路
轻松学
了解生活中光电传感器的应用
洗手时,在自动感应水龙头下伸出手,水就会自动地流出来;走近商场的大门,自动感应门就会自动地打开…这些都是光电传感器的功劳。光电传感器可以感知信息,检测光信号的特征和强度,并将它转换为电信号。
认识机器人的光电传感器
光电传感器在环境光干扰不是得严重的情况下,能够分辦不同颜色的深浅,主要用于区分黑色和其他颜色,可以用于机器人循迹。
了解机器人循迹原理
光电传感器就像机器人的眼晴,机器人就是利用它来区分不同颜色,完成沿固定轨迹行走的。在机器人的前方安装两个光电传感器,安装时要注意靠近地面、高度一致,且相互之间距离要略大于轨迹的宽度。当左边传感器进入轨迹时,机器人向左行驶让它离开轨迹;当右边传感器进入轨迹时,机器人向右行驶让它离开轨迹;当两个传感器都不在轨迹之内时机器人向前行驶。机器人沿固定轨迹行驶的流程图如下图所示。
快乐做
搭建机器人
在行走机器人的基础上,安装两个光电传感器,分别连接在1号端口和3号端口,注意安装的高度和间距,如下图所示。
编写程序
根据程序流程图编写出机器人循迹程序。
光电传感器检测颜色深浅的命令为checklight1,命令后的1表示端口,要和机器人连线对应。检测的数值范围是1~ 100,数值越大表明检测到的颜色越浅,数值越小表明检测到的颜色越深。
程序中的C1和C3是两个变量,用于存储光电传感器的比较值,这样在比较值发生变化的时候,只需要修改程序中的一个位置就可以了。
用“and"连接“( checklight 1) >C1”和“( checklight 3)> C3”两个条件进行判断,只有当这两个条件同时满足时,判断条件才成立,只要有一个条件不满足, 判断条件就不成立。
测试程序
机器人运行程序之前,要注意将机器人的两个光电传感器放在轨迹两侧,然后按下启动按钮。如果不能完成循迹任务,可以根据环境调整C1和C3的数值。
互动评
通过本节课的学习,我们学会了如何让机器人沿固定轨迹行走。请大家对照下表进行评价,将得到的旗涂成红色。
今天的学习到此结束,大家都学会了么?
谢谢
同课章节目录