六年级下册信息技术课件-第13课 不会碰坏的机器人 川教版(共14张PPT)
文档属性
| 名称 | 六年级下册信息技术课件-第13课 不会碰坏的机器人 川教版(共14张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 2.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 川教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-10-04 00:00:00 | ||
图片预览

文档简介
不会碰坏的机器人
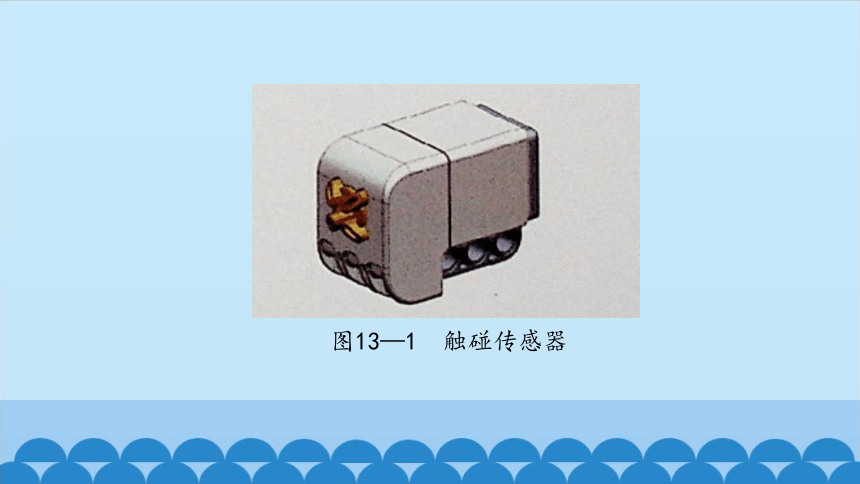
图13—1是机器人的触碰传感器。当按下触碰传感器上的黄色按钮时,传感器会将触碰信号传递给主控器。这样,主控器可以根据得到的信息,发出指令,让机器人做出相应的动作。
图13—1 触碰传感器
二、任务分析
我们在机器人前端安装一个触碰传感器。当机器人与墙接触时,触碰传感器的触碰按钮被压下,这时与触碰传感器相连的主控器就得到相应的信号立即发出机器人后退的指令,再让机器人换一个方向运动,这样机器人就不会被碰坏了。
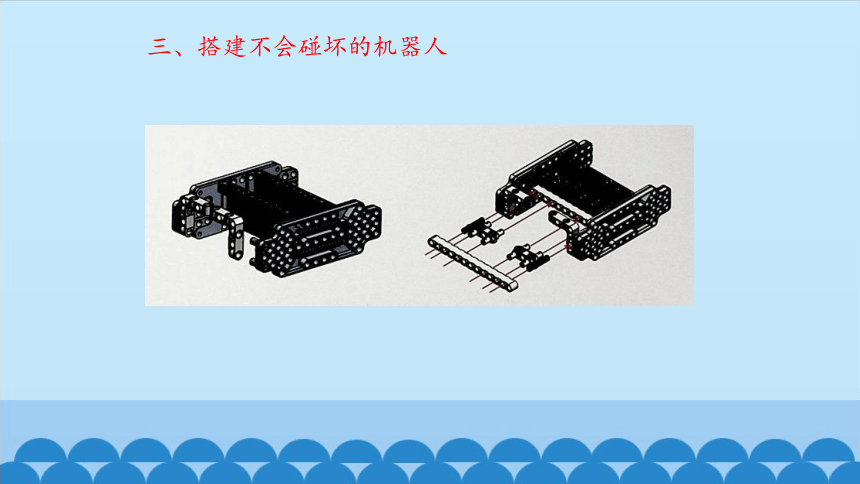
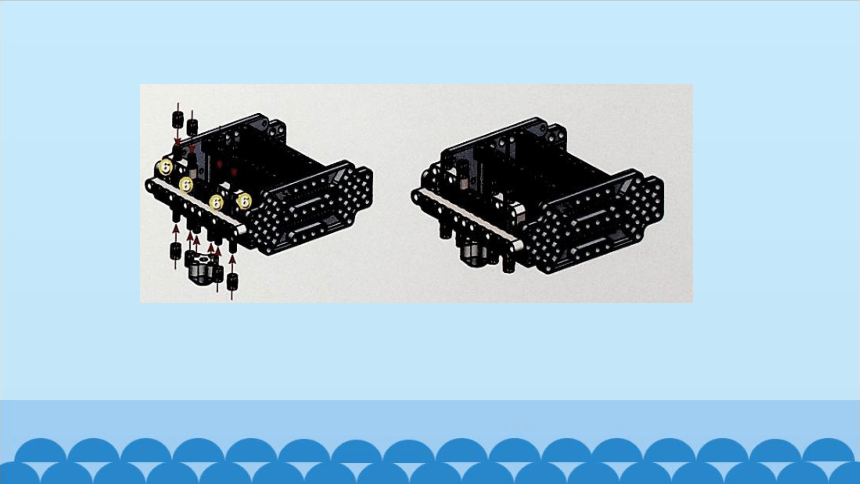
三、搭建不会碰坏的机器人
图13—2 搭建不会碰坏的机器人
四、编写程序
1、电动机控制方法
图13—3 电动机安装方向相反,控制命令也要相反
图13—4 提示框能帮助我们输入正确的命令
2、触碰传感器检测命令
3、编写完整的“不会碰坏的机器人”程序
图13—5 不会碰坏的机器人完整的程序
4、下载编写好的程序,在机器人上运行,观察运行结果。
图13—6 在四周用挡板围成的场地上进行测试
谢 谢
图13—1是机器人的触碰传感器。当按下触碰传感器上的黄色按钮时,传感器会将触碰信号传递给主控器。这样,主控器可以根据得到的信息,发出指令,让机器人做出相应的动作。
图13—1 触碰传感器
二、任务分析
我们在机器人前端安装一个触碰传感器。当机器人与墙接触时,触碰传感器的触碰按钮被压下,这时与触碰传感器相连的主控器就得到相应的信号立即发出机器人后退的指令,再让机器人换一个方向运动,这样机器人就不会被碰坏了。
三、搭建不会碰坏的机器人
图13—2 搭建不会碰坏的机器人
四、编写程序
1、电动机控制方法
图13—3 电动机安装方向相反,控制命令也要相反
图13—4 提示框能帮助我们输入正确的命令
2、触碰传感器检测命令
3、编写完整的“不会碰坏的机器人”程序
图13—5 不会碰坏的机器人完整的程序
4、下载编写好的程序,在机器人上运行,观察运行结果。
图13—6 在四周用挡板围成的场地上进行测试
谢 谢