人教版必修二课后练习第七章 机械能守恒定律 7.9实验:验证机械能守恒定律
文档属性
| 名称 | 人教版必修二课后练习第七章 机械能守恒定律 7.9实验:验证机械能守恒定律 |
|
|
| 格式 | zip | ||
| 文件大小 | 251.7KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版(新课程标准) | ||
| 科目 | 物理 | ||
| 更新时间 | 2020-10-05 00:00:00 | ||
图片预览
文档简介
第七章 机械能守恒定律
实验:验证机械能守恒定律
基础过关练
题组一 课本经典实验
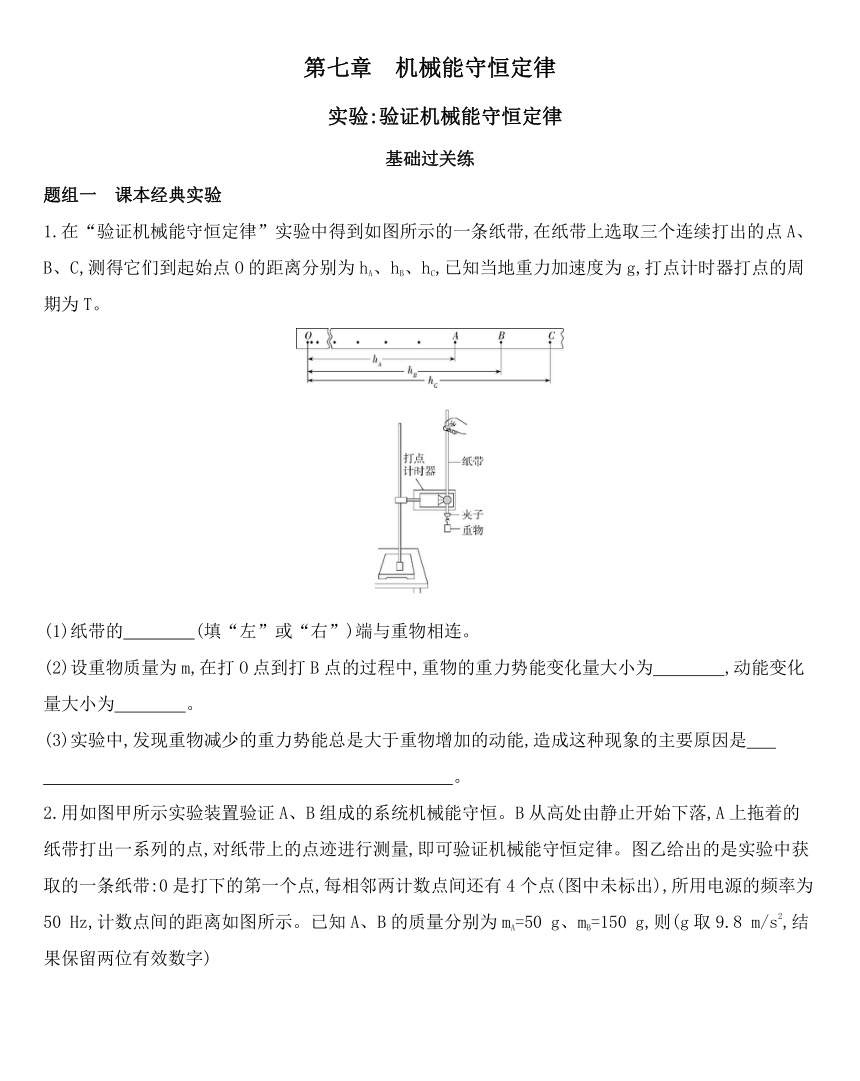
1.在“验证机械能守恒定律”实验中得到如图所示的一条纸带,在纸带上选取三个连续打出的点A、B、C,测得它们到起始点O的距离分别为hA、hB、hC,已知当地重力加速度为g,打点计时器打点的周期为T。
(1)纸带的 (填“左”或“右”)端与重物相连。?
(2)设重物质量为m,在打O点到打B点的过程中,重物的重力势能变化量大小为 ,动能变化量大小为 。?
(3)实验中,发现重物减少的重力势能总是大于重物增加的动能,造成这种现象的主要原因是?
。?
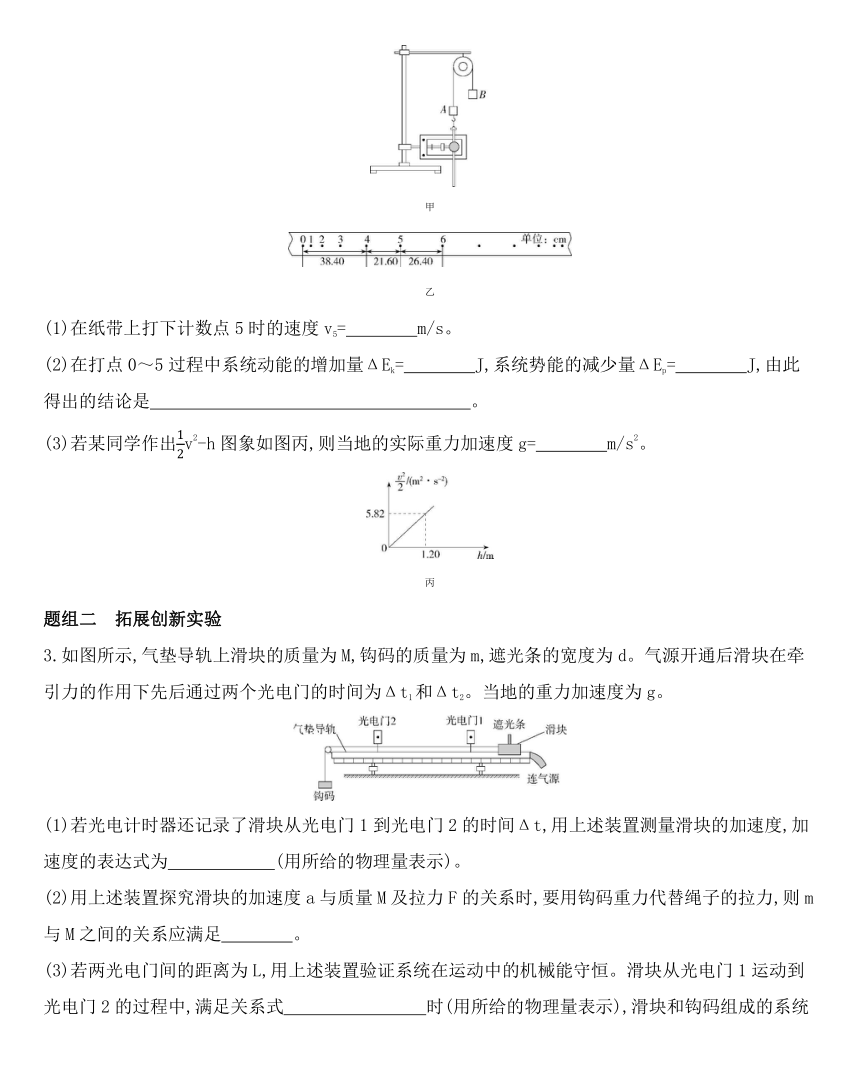
2.用如图甲所示实验装置验证A、B组成的系统机械能守恒。B从高处由静止开始下落,A上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机械能守恒定律。图乙给出的是实验中获取的一条纸带:0是打下的第一个点,每相邻两计数点间还有4个点(图中未标出),所用电源的频率为50
Hz,计数点间的距离如图所示。已知A、B的质量分别为mA=50
g、mB=150
g,则(g取9.8
m/s2,结果保留两位有效数字)
甲
乙
(1)在纸带上打下计数点5时的速度v5= m/s。?
(2)在打点0~5过程中系统动能的增加量ΔEk= J,系统势能的减少量ΔEp= J,由此得出的结论是 。?
(3)若某同学作出v2-h图象如图丙,则当地的实际重力加速度g= m/s2。?
丙
题组二 拓展创新实验
3.如图所示,气垫导轨上滑块的质量为M,钩码的质量为m,遮光条的宽度为d。气源开通后滑块在牵引力的作用下先后通过两个光电门的时间为Δt1和Δt2。当地的重力加速度为g。
(1)若光电计时器还记录了滑块从光电门1到光电门2的时间Δt,用上述装置测量滑块的加速度,加速度的表达式为 (用所给的物理量表示)。?
(2)用上述装置探究滑块的加速度a与质量M及拉力F的关系时,要用钩码重力代替绳子的拉力,则m与M之间的关系应满足 。?
(3)若两光电门间的距离为L,用上述装置验证系统在运动中的机械能守恒。滑块从光电门1运动到光电门2的过程中,满足关系式 时(用所给的物理量表示),滑块和钩码组成的系统机械能守恒。正常情况下,在测量过程中,系统动能的增加量总是 (填“大于”“等于”或“小于”)钩码重力势能的减少量。?
能力提升练
题组一 利用光电门验证机械能守恒定律
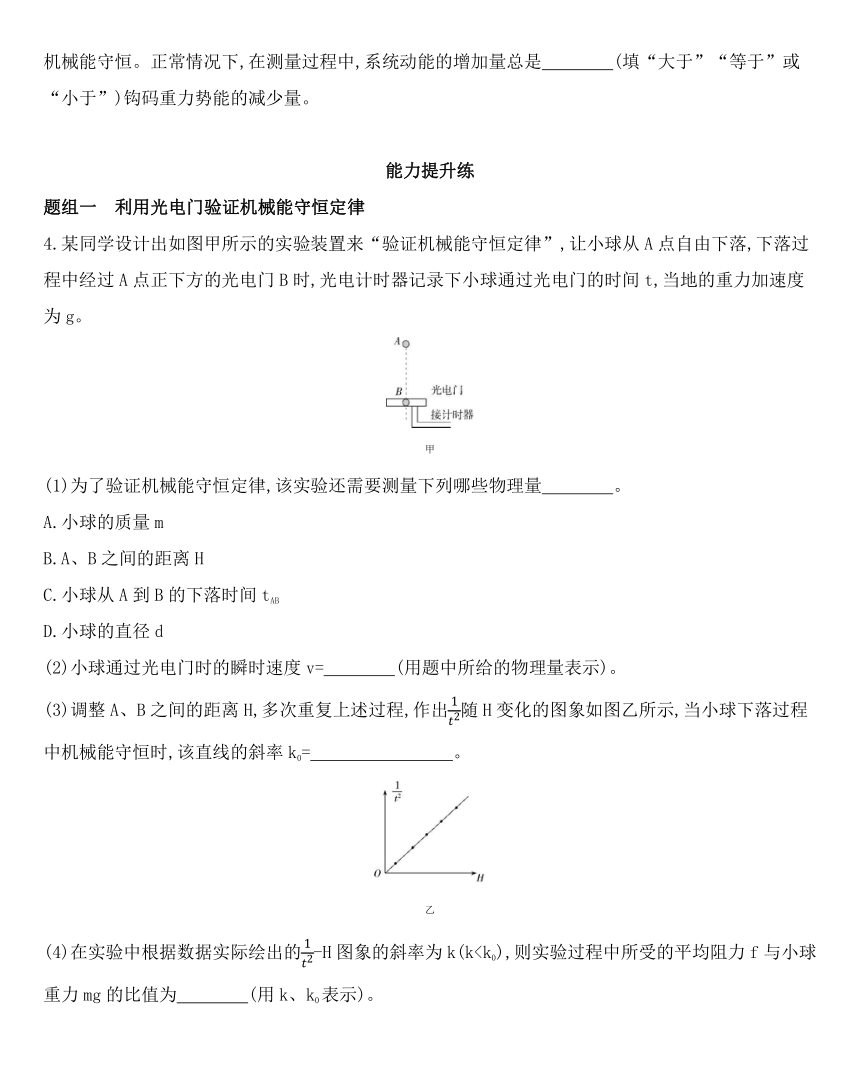
4.某同学设计出如图甲所示的实验装置来“验证机械能守恒定律”,让小球从A点自由下落,下落过程中经过A点正下方的光电门B时,光电计时器记录下小球通过光电门的时间t,当地的重力加速度为g。
甲
(1)为了验证机械能守恒定律,该实验还需要测量下列哪些物理量 。?
A.小球的质量m
B.A、B之间的距离H
C.小球从A到B的下落时间tAB
D.小球的直径d
(2)小球通过光电门时的瞬时速度v= (用题中所给的物理量表示)。?
(3)调整A、B之间的距离H,多次重复上述过程,作出随H变化的图象如图乙所示,当小球下落过程中机械能守恒时,该直线的斜率k0= 。?
乙
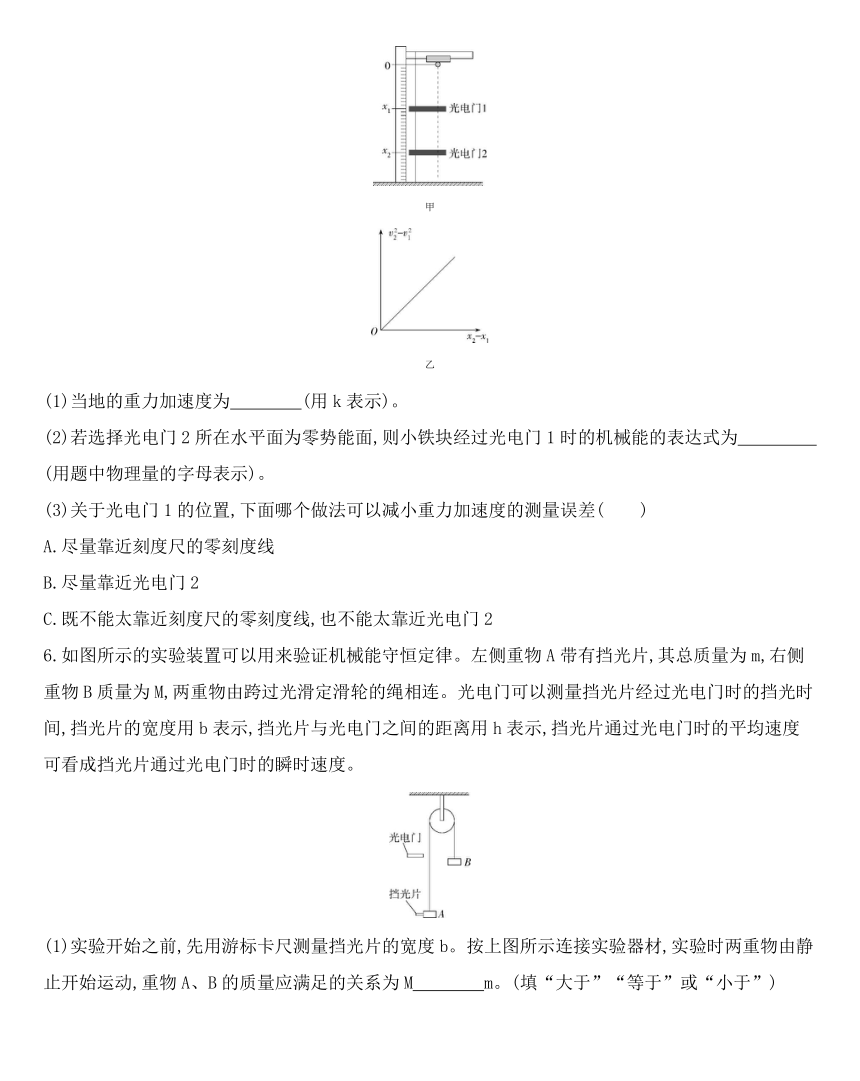
(4)在实验中根据数据实际绘出的-H图象的斜率为k(k5.(★★☆)某探究小组想利用验证机械能守恒定律的装置测量当地的重力加速度。如图甲所示,框架上装有可上下移动位置的光电门1和固定不动的光电门2,框架竖直部分紧贴一刻度尺,零刻度线在上端,可以测量出两个光电门到零刻度线的距离x1和x2;框架水平部分用电磁铁吸住一个质量为m的小铁块,小铁块的重心所在高度恰好与刻度尺的零刻度线对齐,切断电磁铁线圈中的电流时,小铁块由静止释放,当小铁块先后经过两个光电门时,与光电门连接的传感器即可测算出其速度大小v1和v2。小组成员多次改变光电门1的位置,得到多组x1和v1的数据,建立如图乙所示的坐标系并描点连线,得出图线的斜率为k。
甲
乙
(1)当地的重力加速度为 (用k表示)。?
(2)若选择光电门2所在水平面为零势能面,则小铁块经过光电门1时的机械能的表达式为 (用题中物理量的字母表示)。?
(3)关于光电门1的位置,下面哪个做法可以减小重力加速度的测量误差( )
A.尽量靠近刻度尺的零刻度线
B.尽量靠近光电门2
C.既不能太靠近刻度尺的零刻度线,也不能太靠近光电门2
6.如图所示的实验装置可以用来验证机械能守恒定律。左侧重物A带有挡光片,其总质量为m,右侧重物B质量为M,两重物由跨过光滑定滑轮的绳相连。光电门可以测量挡光片经过光电门时的挡光时间,挡光片的宽度用b表示,挡光片与光电门之间的距离用h表示,挡光片通过光电门时的平均速度可看成挡光片通过光电门时的瞬时速度。
(1)实验开始之前,先用游标卡尺测量挡光片的宽度b。按上图所示连接实验器材,实验时两重物由静止开始运动,重物A、B的质量应满足的关系为M m。(填“大于”“等于”或“小于”)?
(2)在实验过程中,与光电门相连的数字毫秒计记录下挡光片的挡光时间为t,则挡光片通过光电门时的瞬时速度可表示为v= 。(用题中所给字母表示)?
(3)两重物从静止开始运动,当挡光片经过光电门时,两重物组成的系统的动能增加量可表示为ΔEk= ,系统的重力势能减少量可表示为ΔEp= ,在实验误差允许的范围内,若满足ΔEk=ΔEp,则可认为系统的机械能守恒。(重力加速度为g)?
(4)为了减小偶然误差,实验时多次改变挡光片到光电门的距离h,作出的v2-h图象为一直线,并测得该图象的斜率为k,则重力加速度g= 。(用题中物理量的字母表示)?
题组二 利用传感器验证机械能守恒定律
7.某同学利用图示装置来研究机械能守恒问题,设计了如下实验。A、B是质量均为m的小物块,C是质量为M的重物,A、B间由轻弹簧相连,A、C间由轻绳相连。在物块B下放置一压力传感器,重物C下放置一速度传感器,压力传感器与速度传感器相连。整个实验中弹簧均处于弹性限度内,重力加速度为g。实验操作如下:
a.开始时,系统在一外力作用下保持静止,细绳拉直但张力为零。现释放C,使其向下运动,当压力传感器示数为零时,速度传感器测出C的速度为v。
b.在实验中保持A、B质量不变,改变C的质量M,多次重复a。
回答下列问题:
(1)该实验中,M和m大小关系必需满足M m(选填“小于”“等于”或“大于”)。?
(2)为便于研究速度v与质量M的关系,每次测C的速度时,C已下降的高度应 (选填“相同”或“不同”)。?
(3)根据所测数据,为更直观地验证机械能守恒定律,应作出 (选填“v2-M”“v2-”或“v2-”)图象。?
(4)根据(3)问的图象,若图线在纵轴上截距为b,则弹簧的劲度系数为 (用题给的已知量表示)。?
8.将力传感器连接到计算机上,不仅可以比较精确地测量力的大小,还能得到力随时间变化的关系图象。甲图中,某同学利用力传感器测量小滑块在光滑半球形容器内运动时对容器的压力来验证小滑块的机械能守恒,实验步骤如下:
①如图甲所示,将压力传感器M固定在小滑块的底部;
②让小滑块静止在光滑半球形容器的最低点,从计算机中得到小滑块对容器的压力随时间变化的关系图象如图乙所示;
③让小滑块沿固定的光滑半球形容器内壁在竖直平面的A、B之间往复运动,OA、OB与竖直方向之间的夹角相等且都为θ(θ<5°)。从计算机中得到小滑块对容器的压力随时间变化的关系图象如图丙所示。
甲
乙
丙
请回答以下问题:
(1)小滑块的重力F0为 N。?
(2)为了验证小滑块在最高点A和最低点处的机械能是否相等,则 。?
A.一定得测出小滑块的质量m
B.一定得测出OA与竖直方向的夹角θ
C.一定得知道当地重力加速度g的大小
D.只要知道图乙中的压力F0和图丙中的最小压力F1、最大压力F2的大小
(3)若已经用实验测得了第(2)问中所需测量的物理量,用R表示半球形容器的半径,则小滑块从A点到最低点的过程中重力势能的减少量ΔEp= (用题中所给物理量的符号来表示),动能的增加量ΔEk= (用题中所给物理量的符号来表示)。由测量的数据得到小滑块的机械能 (填“是”或“不”)守恒的。?
题组三 利用气垫导轨验证机械能守恒定律
9.某同学用如图所示的装置“验证机械能守恒定律”。实验的主要步骤如下:
①调整气垫导轨使之水平(气垫导轨所在桌面足够高);
②用天平测量滑块(含遮光条)质量并记录为M;
③测量遮光条宽度并记录为d;
④测量A、B间的距离L;
⑤将滑块放在气垫导轨上,通过轻质细绳与钩码连接,记录钩码总质量为m;
⑥将滑块从A位置释放后,光电计时器测量遮光条通过光电门的时间并记录为Δt;
⑦对测量数据进行分析,得出实验结论。
请回答下列问题:
(1)实验前应先调节气垫导轨水平,方法是:取下钩码,接通气垫导轨装置的电源,调节导轨下面的螺母,若滑块放在气垫导轨上任意位置都能 ,?
则导轨水平。
(2)利用本实验中需验证的机械能守恒表达式,推导出当地的重力加速度为 (用以上对应物理量的符号表示)。?
(3)实验中发现动能增加量ΔEk总是稍小于重力势能减少量ΔEp,增加下落高度后,则ΔEp-ΔEk将 (选填“增加”“减小”或“不变”)。?
10.利用气垫导轨验证机械能守恒定律,实验装置如图甲所示,水平桌面上固定一倾斜的气垫导轨,导轨上A点处有一带长方形遮光片的滑块,其总质量为M,左端由跨过轻质光滑定滑轮的细绳和一质量为m的小球相连;遮光片两条长边与导轨垂直,导轨上B点有一光电门,可以测量遮光片经过光电门时的挡光时间t,用d表示A点到B点的距离,b表示遮光片的宽度,将遮光片通过光电门的平均速度看做滑块通过B点时的瞬时速度,实验时滑块在A处由静止开始运动。
甲
(1)某次实验测得倾角θ=30°,重力加速度用g表示,滑块从A处到达B处时小球和滑块组成的系统动能的增加量可表示为ΔEk= ,系统重力势能的减少量可表示为ΔEp= ,在误差允许的范围内,若ΔEk=ΔEp,则可认为系统的机械能守恒。(用题中字母表示)?
(2)在上述实验中,某同学改变A、B间的距离,作出的v2-d图象如图乙所示,并测得M=m,则重力加速度g= m/s2。?
乙
11.(★★★)利用气垫导轨验证机械能守恒定律,实验装置如图甲所示,水平桌面上固定一水平的气垫导轨,导轨上A点处有一滑块,其质量为M,左端由跨过光滑定滑轮的轻质细绳与一质量为m的小球相连。调节细绳的长度使每次实验时滑块运动到B点处与劲度系数为k的弹簧接触时小球恰好落地,测出每次弹簧的压缩量x,如果在B点的正上方安装一个速度传感器,用来测定滑块到达B点的速度,发现速度v与弹簧的压缩量x成正比,作出速度v随弹簧压缩量x变化的图象如图乙所示,测得v-x图象的斜率k'=。在某次实验中,某同学没有开启速度传感器,但测出了A、B两点间的距离为L,弹簧的压缩量为x0,重力加速度用g表示,则:
甲
乙
(1)滑块从A处到达B处时,滑块和小球组成的系统动能的增加量可表示为ΔEk= ,系统重力势能的减少量可表示为ΔEp= ,在误差允许的范围内,若ΔEk=ΔEp,则可认为系统的机械能守恒。(用题中字母表示)?
(2)在实验中,该同学测得M=m=1
kg,弹簧的劲度系数k=100
N/m,并改变A、B间的距离L,作出的x2-L图象如图丙所示,则重力加速度g= m/s2。?
丙
答案全解全析
基础过关练
1.答案 (1)左 (2)mghB m (3)存在摩擦及空气阻力
解析 (1)从O到C可以看出,相等时间内的位移越来越大,则纸带的左端与重物相连。
(2)重物的重力势能变化量大小为ΔEp=mghB,B点的速度大小vB=,则动能变化量大小为ΔEk=m=m。
(3)实验中,发现ΔEp>ΔEk,这是因为纸带和重物运动过程中,纸带与打点计时器之间存在摩擦以及重物与空气之间存在阻力。
2.答案 (1)2.4 (2)0.58 0.59 在误差允许的范围内,A、B组成的系统机械能守恒 (3)9.7
解析 (1)根据在匀变速直线运动中时间中点的瞬时速度等于该过程中的平均速度,可知打计数点5时的速度为v5==
m/s=2.4
m/s。
(2)物体的初速度为零,动能的增加量ΔEk=(mA+mB)-0=0.58
J;重力势能的减少量等于物体重力做的功,故ΔEp=W=(mB-mA)gh=0.59
J;由此可知动能的增加量和势能的减少量在误差允许的范围内相等,因此A、B组成的系统机械能守恒。
(3)根据机械能守恒定律可知(mB-mA)gh=(mA+mB)v2,即有v2=gh,所以v2-h图象中图线的斜率表示g,由图可知,斜率k=g=
m/s2=4.85
m/s2,故当地的实际重力加速度g=9.7
m/s2。
3.答案 (1) (2)m?M
(3)mgL=(m+M) 小于
解析 (1)滑块通过第一个光电门时的速度v1=,滑块通过第二个光电门时的速度v2=,滑块的加速度a==。
(2)当滑块的质量M远大于钩码的质量m时,绳子中的拉力近似等于钩码的重力。
(3)滑块从光电门1运动到光电门2的过程中,系统减少的重力势能ΔEp=mgL,增加的动能ΔEk=(M+m)-(M+m),需要验证的是ΔEp=ΔEk,即mgL=(M+m)-(M+m)=(m+M)×。正常情况下,由于阻力作用,系统动能的增加量总是小于钩码重力势能的减少量。
能力提升练
4.答案 (1)BD (2) (3) (4)
解析 (1)根据机械能守恒定律的表达式可知,方程两边可以约去质量,因此不需要测量质量,选项A错误;根据实验原理可知,需要测量的是A点到光电门B的距离H,选项B正确;利用小球通过光电门的平均速度来代替瞬时速度,不需要测量下落时间,选项C错误;利用小球通过光电门的平均速度来代替瞬时速度时,需要知道挡光物体的尺寸,因此需要测量小球的直径,选项D正确。(2)已知小球通过光电门的时间、小球的直径,则可以由平均速度表示经过光电门时的速度,故v=。(3)若小球下落过程中机械能守恒,则有mgH=mv2,即2gH=()2,=·H,该直线的斜率k0=。(4)实验中图线满足=kH。因存在阻力,则有mgH-fH=mv2,将v=、k0=、=kH代入上式,可得小球和纸带下落过程中所受的平均阻力与小球所受重力的比值为=。
5.答案 (1)k (2)m+km(x2-x1) (3)C
解析 (1)以零刻度线所在水平面为零势能面,小铁块从光电门1运动到光电门2的过程中机械能守恒,根据机械能守恒定律得m-mgx1=m-mgx2,整理得-=2g(x2-x1),所以图线的斜率k=2g,解得g=。
(2)小铁块经过光电门1时的机械能等于小铁块经过光电门1时的动能加上势能,若选择光电门2所在水平面为零势能面,则有E1=m+mg(x2-x1)=m+km(x2-x1)。
(3)若靠近刻度尺的零刻度线,会影响小铁块经过光电门1时速度的测量;靠近光电门2,会影响高度差的测量,所以为了减小重力加速度的测量误差,既不能太靠近刻度尺的零刻度线,也不能太靠近光电门2,选项C正确。
6.答案 (1)大于 (2) (3) (M-m)gh (4)
解析 (1)实验时需让重物A向上加速,则重物A、B的质量应满足的关系为M>m。
(2)挡光片通过光电门的瞬时速度v=。
(3)系统动能的增加量ΔEk=(M+m)v2=,系统重力势能的减少量ΔEp=(M-m)gh。
(4)根据系统机械能守恒得(M+m)v2=(M-m)gh,解得v2=h,则图线的斜率k=,解得重力加速度g=。
7.答案 (1)大于 (2)相同 (3)v2- (4)
解析 (1)根据题意,为确保压力传感器的示数能够为零,弹簧要从压缩状态变为伸长状态,则C的质量M要大于A的质量m。
(2)刚释放C时,弹簧处于压缩状态,若使压力传感器示数为零,则弹簧的拉力为F=mg,因此弹簧的形变量为Δx=Δx1+Δx2=+=;不论C的质量如何,要使压力传感器示数为零,应使A上升的高度为,则C下落的高度为,即C下落的高度应相同。
(3)选取A、C及弹簧为系统,初始状态和压力传感器示数为零时,弹簧的弹性势能相同,系统内只有动能和重力势能的转化,根据机械能守恒定律,则有(M-m)g×=(M+m)v2,整理可得v2=-·+;为得到线性关系图线,应作出v2-图象。(4)由(3)问中表达式可知=b,解得k=。
8.答案 (1)1.00 (2)D (3)(F0-F1)R R 是
解析 (1)小滑块静止时对容器的压力与其重力大小相等,则小滑块的重力为F0=1.00
N。
(2)小滑块在最低点,由牛顿第二定律,有F2-F0=m,小滑块在最低点的动能为Ek=mv2=(F2-F0)R,从A点到最低点,小滑块重力势能的减少量等于重力做的功,即ΔEp=WG=F0R(1-cos
θ)。小滑块在A点时,有F0
cos
θ=F1。为了验证小滑块在A点和最低点的机械能是否相等,即验证小滑块从A点到最低点的过程中,动能的增加量等于重力势能的减少量,即验证(F2-F0)R=F0R(1-cos
θ)是否成立,联立化简得3F0=2F1+F2,选项D正确。
(3)结合(2)的分析可知,小滑块从A点到最低点的过程中重力势能的减少量ΔEp=F0R(1-cos
θ)=(F0-F1)R,动能的增加量ΔEk=mv2=(F2-F0)R。代入题图中所给数据,可得重力势能减少量(F0-F1)R=(1.00-0.99)R=0.01R,动能的增加量(F2-F0)R=×(1.02-1.00)R=0.01R,所以机械能守恒。
9.答案 (1)保持静止 (2)g= (3)增加
解析 (1)调节气垫导轨水平时,通过调节导轨下面的螺母,使滑块放在导轨上任意位置都能保持静止,则导轨调节水平。
(2)根据钩码和滑块的系统机械能守恒有mgL=(M+m)v2-0,滑块通过光电门的速度为v=,联立可得当地的重力加速度为g=。
(3)动能增加量ΔEk总是稍小于重力势能减少量ΔEp,说明机械能有损失,增加下落高度后,机械能损失更多,则ΔEp-ΔEk将增加。
10.答案 (1) gd (2)9.6
解析 (1)滑块通过B点时的速度v=,则系统动能的增加量为ΔEk=(M+m)v2=,系统重力势能的减少量为ΔEp=mgd-Mgd
sin
30°=gd。
(2)根据系统机械能守恒得(M+m)v2=gd,则v2=,又M=m,则v2=gd;图线的斜率k=g=
m/s2,解得g=9.6
m/s2。
11.答案 (1) mgL (2)9.6
解析 (1)由题意可知,当弹簧的压缩量为x0时对应的滑块到达B点的速度v=k'x0=x0,则滑块和小球组成的系统动能的增加量可表示为ΔEk=(M+m)v2=;系统重力势能的减少量可表示为ΔEp=mgL。
(2)由机械能守恒定律得(M+m)v2=mgL;v=x,代入数据,解得x2=L;结合题图丙可得g=9.6
m/s2
实验:验证机械能守恒定律
基础过关练
题组一 课本经典实验
1.在“验证机械能守恒定律”实验中得到如图所示的一条纸带,在纸带上选取三个连续打出的点A、B、C,测得它们到起始点O的距离分别为hA、hB、hC,已知当地重力加速度为g,打点计时器打点的周期为T。
(1)纸带的 (填“左”或“右”)端与重物相连。?
(2)设重物质量为m,在打O点到打B点的过程中,重物的重力势能变化量大小为 ,动能变化量大小为 。?
(3)实验中,发现重物减少的重力势能总是大于重物增加的动能,造成这种现象的主要原因是?
。?
2.用如图甲所示实验装置验证A、B组成的系统机械能守恒。B从高处由静止开始下落,A上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机械能守恒定律。图乙给出的是实验中获取的一条纸带:0是打下的第一个点,每相邻两计数点间还有4个点(图中未标出),所用电源的频率为50
Hz,计数点间的距离如图所示。已知A、B的质量分别为mA=50
g、mB=150
g,则(g取9.8
m/s2,结果保留两位有效数字)
甲
乙
(1)在纸带上打下计数点5时的速度v5= m/s。?
(2)在打点0~5过程中系统动能的增加量ΔEk= J,系统势能的减少量ΔEp= J,由此得出的结论是 。?
(3)若某同学作出v2-h图象如图丙,则当地的实际重力加速度g= m/s2。?
丙
题组二 拓展创新实验
3.如图所示,气垫导轨上滑块的质量为M,钩码的质量为m,遮光条的宽度为d。气源开通后滑块在牵引力的作用下先后通过两个光电门的时间为Δt1和Δt2。当地的重力加速度为g。
(1)若光电计时器还记录了滑块从光电门1到光电门2的时间Δt,用上述装置测量滑块的加速度,加速度的表达式为 (用所给的物理量表示)。?
(2)用上述装置探究滑块的加速度a与质量M及拉力F的关系时,要用钩码重力代替绳子的拉力,则m与M之间的关系应满足 。?
(3)若两光电门间的距离为L,用上述装置验证系统在运动中的机械能守恒。滑块从光电门1运动到光电门2的过程中,满足关系式 时(用所给的物理量表示),滑块和钩码组成的系统机械能守恒。正常情况下,在测量过程中,系统动能的增加量总是 (填“大于”“等于”或“小于”)钩码重力势能的减少量。?
能力提升练
题组一 利用光电门验证机械能守恒定律
4.某同学设计出如图甲所示的实验装置来“验证机械能守恒定律”,让小球从A点自由下落,下落过程中经过A点正下方的光电门B时,光电计时器记录下小球通过光电门的时间t,当地的重力加速度为g。
甲
(1)为了验证机械能守恒定律,该实验还需要测量下列哪些物理量 。?
A.小球的质量m
B.A、B之间的距离H
C.小球从A到B的下落时间tAB
D.小球的直径d
(2)小球通过光电门时的瞬时速度v= (用题中所给的物理量表示)。?
(3)调整A、B之间的距离H,多次重复上述过程,作出随H变化的图象如图乙所示,当小球下落过程中机械能守恒时,该直线的斜率k0= 。?
乙
(4)在实验中根据数据实际绘出的-H图象的斜率为k(k
甲
乙
(1)当地的重力加速度为 (用k表示)。?
(2)若选择光电门2所在水平面为零势能面,则小铁块经过光电门1时的机械能的表达式为 (用题中物理量的字母表示)。?
(3)关于光电门1的位置,下面哪个做法可以减小重力加速度的测量误差( )
A.尽量靠近刻度尺的零刻度线
B.尽量靠近光电门2
C.既不能太靠近刻度尺的零刻度线,也不能太靠近光电门2
6.如图所示的实验装置可以用来验证机械能守恒定律。左侧重物A带有挡光片,其总质量为m,右侧重物B质量为M,两重物由跨过光滑定滑轮的绳相连。光电门可以测量挡光片经过光电门时的挡光时间,挡光片的宽度用b表示,挡光片与光电门之间的距离用h表示,挡光片通过光电门时的平均速度可看成挡光片通过光电门时的瞬时速度。
(1)实验开始之前,先用游标卡尺测量挡光片的宽度b。按上图所示连接实验器材,实验时两重物由静止开始运动,重物A、B的质量应满足的关系为M m。(填“大于”“等于”或“小于”)?
(2)在实验过程中,与光电门相连的数字毫秒计记录下挡光片的挡光时间为t,则挡光片通过光电门时的瞬时速度可表示为v= 。(用题中所给字母表示)?
(3)两重物从静止开始运动,当挡光片经过光电门时,两重物组成的系统的动能增加量可表示为ΔEk= ,系统的重力势能减少量可表示为ΔEp= ,在实验误差允许的范围内,若满足ΔEk=ΔEp,则可认为系统的机械能守恒。(重力加速度为g)?
(4)为了减小偶然误差,实验时多次改变挡光片到光电门的距离h,作出的v2-h图象为一直线,并测得该图象的斜率为k,则重力加速度g= 。(用题中物理量的字母表示)?
题组二 利用传感器验证机械能守恒定律
7.某同学利用图示装置来研究机械能守恒问题,设计了如下实验。A、B是质量均为m的小物块,C是质量为M的重物,A、B间由轻弹簧相连,A、C间由轻绳相连。在物块B下放置一压力传感器,重物C下放置一速度传感器,压力传感器与速度传感器相连。整个实验中弹簧均处于弹性限度内,重力加速度为g。实验操作如下:
a.开始时,系统在一外力作用下保持静止,细绳拉直但张力为零。现释放C,使其向下运动,当压力传感器示数为零时,速度传感器测出C的速度为v。
b.在实验中保持A、B质量不变,改变C的质量M,多次重复a。
回答下列问题:
(1)该实验中,M和m大小关系必需满足M m(选填“小于”“等于”或“大于”)。?
(2)为便于研究速度v与质量M的关系,每次测C的速度时,C已下降的高度应 (选填“相同”或“不同”)。?
(3)根据所测数据,为更直观地验证机械能守恒定律,应作出 (选填“v2-M”“v2-”或“v2-”)图象。?
(4)根据(3)问的图象,若图线在纵轴上截距为b,则弹簧的劲度系数为 (用题给的已知量表示)。?
8.将力传感器连接到计算机上,不仅可以比较精确地测量力的大小,还能得到力随时间变化的关系图象。甲图中,某同学利用力传感器测量小滑块在光滑半球形容器内运动时对容器的压力来验证小滑块的机械能守恒,实验步骤如下:
①如图甲所示,将压力传感器M固定在小滑块的底部;
②让小滑块静止在光滑半球形容器的最低点,从计算机中得到小滑块对容器的压力随时间变化的关系图象如图乙所示;
③让小滑块沿固定的光滑半球形容器内壁在竖直平面的A、B之间往复运动,OA、OB与竖直方向之间的夹角相等且都为θ(θ<5°)。从计算机中得到小滑块对容器的压力随时间变化的关系图象如图丙所示。
甲
乙
丙
请回答以下问题:
(1)小滑块的重力F0为 N。?
(2)为了验证小滑块在最高点A和最低点处的机械能是否相等,则 。?
A.一定得测出小滑块的质量m
B.一定得测出OA与竖直方向的夹角θ
C.一定得知道当地重力加速度g的大小
D.只要知道图乙中的压力F0和图丙中的最小压力F1、最大压力F2的大小
(3)若已经用实验测得了第(2)问中所需测量的物理量,用R表示半球形容器的半径,则小滑块从A点到最低点的过程中重力势能的减少量ΔEp= (用题中所给物理量的符号来表示),动能的增加量ΔEk= (用题中所给物理量的符号来表示)。由测量的数据得到小滑块的机械能 (填“是”或“不”)守恒的。?
题组三 利用气垫导轨验证机械能守恒定律
9.某同学用如图所示的装置“验证机械能守恒定律”。实验的主要步骤如下:
①调整气垫导轨使之水平(气垫导轨所在桌面足够高);
②用天平测量滑块(含遮光条)质量并记录为M;
③测量遮光条宽度并记录为d;
④测量A、B间的距离L;
⑤将滑块放在气垫导轨上,通过轻质细绳与钩码连接,记录钩码总质量为m;
⑥将滑块从A位置释放后,光电计时器测量遮光条通过光电门的时间并记录为Δt;
⑦对测量数据进行分析,得出实验结论。
请回答下列问题:
(1)实验前应先调节气垫导轨水平,方法是:取下钩码,接通气垫导轨装置的电源,调节导轨下面的螺母,若滑块放在气垫导轨上任意位置都能 ,?
则导轨水平。
(2)利用本实验中需验证的机械能守恒表达式,推导出当地的重力加速度为 (用以上对应物理量的符号表示)。?
(3)实验中发现动能增加量ΔEk总是稍小于重力势能减少量ΔEp,增加下落高度后,则ΔEp-ΔEk将 (选填“增加”“减小”或“不变”)。?
10.利用气垫导轨验证机械能守恒定律,实验装置如图甲所示,水平桌面上固定一倾斜的气垫导轨,导轨上A点处有一带长方形遮光片的滑块,其总质量为M,左端由跨过轻质光滑定滑轮的细绳和一质量为m的小球相连;遮光片两条长边与导轨垂直,导轨上B点有一光电门,可以测量遮光片经过光电门时的挡光时间t,用d表示A点到B点的距离,b表示遮光片的宽度,将遮光片通过光电门的平均速度看做滑块通过B点时的瞬时速度,实验时滑块在A处由静止开始运动。
甲
(1)某次实验测得倾角θ=30°,重力加速度用g表示,滑块从A处到达B处时小球和滑块组成的系统动能的增加量可表示为ΔEk= ,系统重力势能的减少量可表示为ΔEp= ,在误差允许的范围内,若ΔEk=ΔEp,则可认为系统的机械能守恒。(用题中字母表示)?
(2)在上述实验中,某同学改变A、B间的距离,作出的v2-d图象如图乙所示,并测得M=m,则重力加速度g= m/s2。?
乙
11.(★★★)利用气垫导轨验证机械能守恒定律,实验装置如图甲所示,水平桌面上固定一水平的气垫导轨,导轨上A点处有一滑块,其质量为M,左端由跨过光滑定滑轮的轻质细绳与一质量为m的小球相连。调节细绳的长度使每次实验时滑块运动到B点处与劲度系数为k的弹簧接触时小球恰好落地,测出每次弹簧的压缩量x,如果在B点的正上方安装一个速度传感器,用来测定滑块到达B点的速度,发现速度v与弹簧的压缩量x成正比,作出速度v随弹簧压缩量x变化的图象如图乙所示,测得v-x图象的斜率k'=。在某次实验中,某同学没有开启速度传感器,但测出了A、B两点间的距离为L,弹簧的压缩量为x0,重力加速度用g表示,则:
甲
乙
(1)滑块从A处到达B处时,滑块和小球组成的系统动能的增加量可表示为ΔEk= ,系统重力势能的减少量可表示为ΔEp= ,在误差允许的范围内,若ΔEk=ΔEp,则可认为系统的机械能守恒。(用题中字母表示)?
(2)在实验中,该同学测得M=m=1
kg,弹簧的劲度系数k=100
N/m,并改变A、B间的距离L,作出的x2-L图象如图丙所示,则重力加速度g= m/s2。?
丙
答案全解全析
基础过关练
1.答案 (1)左 (2)mghB m (3)存在摩擦及空气阻力
解析 (1)从O到C可以看出,相等时间内的位移越来越大,则纸带的左端与重物相连。
(2)重物的重力势能变化量大小为ΔEp=mghB,B点的速度大小vB=,则动能变化量大小为ΔEk=m=m。
(3)实验中,发现ΔEp>ΔEk,这是因为纸带和重物运动过程中,纸带与打点计时器之间存在摩擦以及重物与空气之间存在阻力。
2.答案 (1)2.4 (2)0.58 0.59 在误差允许的范围内,A、B组成的系统机械能守恒 (3)9.7
解析 (1)根据在匀变速直线运动中时间中点的瞬时速度等于该过程中的平均速度,可知打计数点5时的速度为v5==
m/s=2.4
m/s。
(2)物体的初速度为零,动能的增加量ΔEk=(mA+mB)-0=0.58
J;重力势能的减少量等于物体重力做的功,故ΔEp=W=(mB-mA)gh=0.59
J;由此可知动能的增加量和势能的减少量在误差允许的范围内相等,因此A、B组成的系统机械能守恒。
(3)根据机械能守恒定律可知(mB-mA)gh=(mA+mB)v2,即有v2=gh,所以v2-h图象中图线的斜率表示g,由图可知,斜率k=g=
m/s2=4.85
m/s2,故当地的实际重力加速度g=9.7
m/s2。
3.答案 (1) (2)m?M
(3)mgL=(m+M) 小于
解析 (1)滑块通过第一个光电门时的速度v1=,滑块通过第二个光电门时的速度v2=,滑块的加速度a==。
(2)当滑块的质量M远大于钩码的质量m时,绳子中的拉力近似等于钩码的重力。
(3)滑块从光电门1运动到光电门2的过程中,系统减少的重力势能ΔEp=mgL,增加的动能ΔEk=(M+m)-(M+m),需要验证的是ΔEp=ΔEk,即mgL=(M+m)-(M+m)=(m+M)×。正常情况下,由于阻力作用,系统动能的增加量总是小于钩码重力势能的减少量。
能力提升练
4.答案 (1)BD (2) (3) (4)
解析 (1)根据机械能守恒定律的表达式可知,方程两边可以约去质量,因此不需要测量质量,选项A错误;根据实验原理可知,需要测量的是A点到光电门B的距离H,选项B正确;利用小球通过光电门的平均速度来代替瞬时速度,不需要测量下落时间,选项C错误;利用小球通过光电门的平均速度来代替瞬时速度时,需要知道挡光物体的尺寸,因此需要测量小球的直径,选项D正确。(2)已知小球通过光电门的时间、小球的直径,则可以由平均速度表示经过光电门时的速度,故v=。(3)若小球下落过程中机械能守恒,则有mgH=mv2,即2gH=()2,=·H,该直线的斜率k0=。(4)实验中图线满足=kH。因存在阻力,则有mgH-fH=mv2,将v=、k0=、=kH代入上式,可得小球和纸带下落过程中所受的平均阻力与小球所受重力的比值为=。
5.答案 (1)k (2)m+km(x2-x1) (3)C
解析 (1)以零刻度线所在水平面为零势能面,小铁块从光电门1运动到光电门2的过程中机械能守恒,根据机械能守恒定律得m-mgx1=m-mgx2,整理得-=2g(x2-x1),所以图线的斜率k=2g,解得g=。
(2)小铁块经过光电门1时的机械能等于小铁块经过光电门1时的动能加上势能,若选择光电门2所在水平面为零势能面,则有E1=m+mg(x2-x1)=m+km(x2-x1)。
(3)若靠近刻度尺的零刻度线,会影响小铁块经过光电门1时速度的测量;靠近光电门2,会影响高度差的测量,所以为了减小重力加速度的测量误差,既不能太靠近刻度尺的零刻度线,也不能太靠近光电门2,选项C正确。
6.答案 (1)大于 (2) (3) (M-m)gh (4)
解析 (1)实验时需让重物A向上加速,则重物A、B的质量应满足的关系为M>m。
(2)挡光片通过光电门的瞬时速度v=。
(3)系统动能的增加量ΔEk=(M+m)v2=,系统重力势能的减少量ΔEp=(M-m)gh。
(4)根据系统机械能守恒得(M+m)v2=(M-m)gh,解得v2=h,则图线的斜率k=,解得重力加速度g=。
7.答案 (1)大于 (2)相同 (3)v2- (4)
解析 (1)根据题意,为确保压力传感器的示数能够为零,弹簧要从压缩状态变为伸长状态,则C的质量M要大于A的质量m。
(2)刚释放C时,弹簧处于压缩状态,若使压力传感器示数为零,则弹簧的拉力为F=mg,因此弹簧的形变量为Δx=Δx1+Δx2=+=;不论C的质量如何,要使压力传感器示数为零,应使A上升的高度为,则C下落的高度为,即C下落的高度应相同。
(3)选取A、C及弹簧为系统,初始状态和压力传感器示数为零时,弹簧的弹性势能相同,系统内只有动能和重力势能的转化,根据机械能守恒定律,则有(M-m)g×=(M+m)v2,整理可得v2=-·+;为得到线性关系图线,应作出v2-图象。(4)由(3)问中表达式可知=b,解得k=。
8.答案 (1)1.00 (2)D (3)(F0-F1)R R 是
解析 (1)小滑块静止时对容器的压力与其重力大小相等,则小滑块的重力为F0=1.00
N。
(2)小滑块在最低点,由牛顿第二定律,有F2-F0=m,小滑块在最低点的动能为Ek=mv2=(F2-F0)R,从A点到最低点,小滑块重力势能的减少量等于重力做的功,即ΔEp=WG=F0R(1-cos
θ)。小滑块在A点时,有F0
cos
θ=F1。为了验证小滑块在A点和最低点的机械能是否相等,即验证小滑块从A点到最低点的过程中,动能的增加量等于重力势能的减少量,即验证(F2-F0)R=F0R(1-cos
θ)是否成立,联立化简得3F0=2F1+F2,选项D正确。
(3)结合(2)的分析可知,小滑块从A点到最低点的过程中重力势能的减少量ΔEp=F0R(1-cos
θ)=(F0-F1)R,动能的增加量ΔEk=mv2=(F2-F0)R。代入题图中所给数据,可得重力势能减少量(F0-F1)R=(1.00-0.99)R=0.01R,动能的增加量(F2-F0)R=×(1.02-1.00)R=0.01R,所以机械能守恒。
9.答案 (1)保持静止 (2)g= (3)增加
解析 (1)调节气垫导轨水平时,通过调节导轨下面的螺母,使滑块放在导轨上任意位置都能保持静止,则导轨调节水平。
(2)根据钩码和滑块的系统机械能守恒有mgL=(M+m)v2-0,滑块通过光电门的速度为v=,联立可得当地的重力加速度为g=。
(3)动能增加量ΔEk总是稍小于重力势能减少量ΔEp,说明机械能有损失,增加下落高度后,机械能损失更多,则ΔEp-ΔEk将增加。
10.答案 (1) gd (2)9.6
解析 (1)滑块通过B点时的速度v=,则系统动能的增加量为ΔEk=(M+m)v2=,系统重力势能的减少量为ΔEp=mgd-Mgd
sin
30°=gd。
(2)根据系统机械能守恒得(M+m)v2=gd,则v2=,又M=m,则v2=gd;图线的斜率k=g=
m/s2,解得g=9.6
m/s2。
11.答案 (1) mgL (2)9.6
解析 (1)由题意可知,当弹簧的压缩量为x0时对应的滑块到达B点的速度v=k'x0=x0,则滑块和小球组成的系统动能的增加量可表示为ΔEk=(M+m)v2=;系统重力势能的减少量可表示为ΔEp=mgL。
(2)由机械能守恒定律得(M+m)v2=mgL;v=x,代入数据,解得x2=L;结合题图丙可得g=9.6
m/s2