五年级下册信息技术课件-第8课 奔跑吧!小车 青岛版(共13张PPT)
文档属性
| 名称 | 五年级下册信息技术课件-第8课 奔跑吧!小车 青岛版(共13张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 3.1MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 其它版本 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-10-10 00:00:00 | ||
图片预览

文档简介
第8课 奔跑吧!小车
目 录
CONTENTS
1
2
3
4
探究学习
要点点击
交流分享
实践应用
通过蓝牙模块实现无线连接。
调整机器人的行进方向、速度。
连接超声波器,使机器人躲避障碍物。
探究学习
要点点击-蓝牙连接
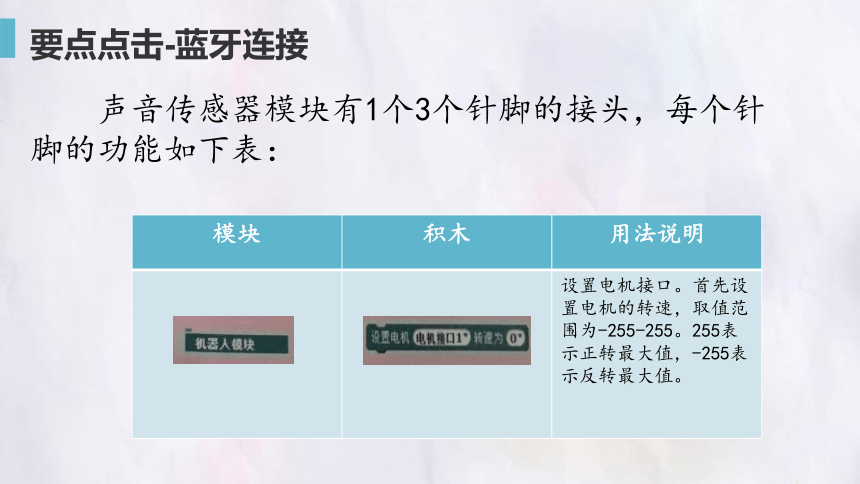
声音传感器模块有1个3个针脚的接头,每个针脚的功能如下表:
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}模块
积木
用法说明
设置电机接口。首先设置电机的转速,取值范围为-255-255。255表示正转最大值,-255表示反转最大值。
要点点击-蓝牙连接
1.设置电机接口。
2.连接马达;找到主控制板的端口并连接马达。
3.在使用蓝牙之前,请先确保电池有电并打开开关。
4.创建蓝牙连接。
5.编写脚本。
单击蓝牙连连接并搜索蓝牙设备,找到名为“mukeblock”的蓝牙连热。连接成劝后,工具栏会发生变化。
要点点击-蓝牙连接
{21E4AEA4-8DFA-4A89-87EB-49C32662AFE0}想法
脚本
脚本描述
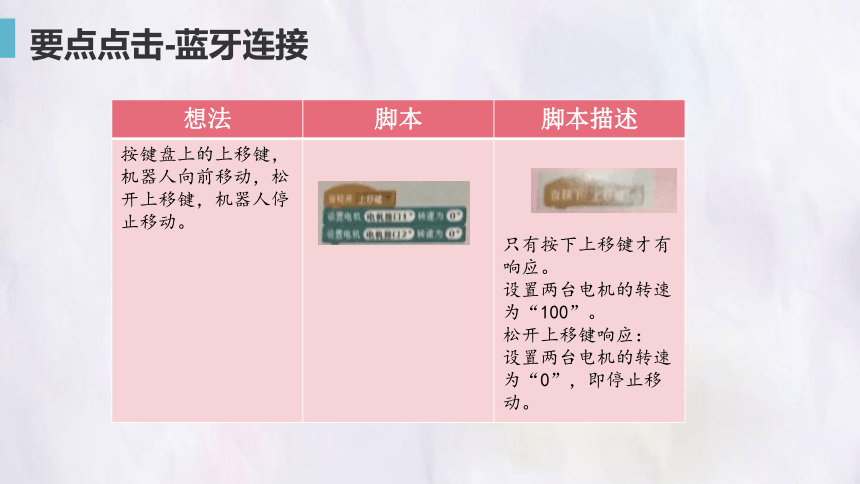
按键盘上的上移键,机器人向前移动,松开上移键,机器人停止移动。
只有按下上移键才有响应。
设置两台电机的转速为“100”。
松开上移键响应:
设置两台电机的转速为“0”,即停止移动。
要点点击-蓝牙连接
电机转速为“100”,“100”并不是真正意义上的速度值,而是便于我们操作的一个“范围值”。在这个值下,不同的电压或者不同的电机会产生不同的转速。这个“范围值”的取值范围是0-255我们可以理解为“0”的时候电机停止,“255”的时候电机达到当前电压下的最大转速。
跟小伙伴交流一下你是怎样连接蓝牙模块的。
交流分享
实践应用-调整机器人的行驶状态
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}想法
脚本
脚本描述
如果一个轮子正转,一个轮子不转,会怎么样?
当按下左移键的时候,设置左电机不转、右电机转动,实现小车向左转弯。(如果你的实验结果和以上效果相反,也没有错,只要记住和你的电机接口号对应的左右电机即可。)
如果一个轮子正转,一个轮子反转,会怎么样?
左轮向后转,右轮向前转,小车会较快地实现向左转。
1.你用到了哪些指令?
2.你的指令参数是怎样设计的?
交流分享
将超声波感应器安装在小车的前部,并连接主板。
定义模块指令:
实践应用-躲避障碍物
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}模块
积木
用法说明
创建模块指令,取名为“sound”。
点击数据和指令,新建模块指令,取名为“sound”。
编写脚本程序:
实践应用-躲避障碍物
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}模块
积木
用法说明
机器人移动的时候,会执行“cound”程序,如果超声波传感器侦测到前方有障碍物,蜂鸣器会发音报警。
如果超声波传感器感应到前方障碍物的距离小于10厘米,那么蜂鸣器会鸣响1秒钟。控制机器人移动时,执行“sound”程序。
谢 谢
目 录
CONTENTS
1
2
3
4
探究学习
要点点击
交流分享
实践应用
通过蓝牙模块实现无线连接。
调整机器人的行进方向、速度。
连接超声波器,使机器人躲避障碍物。
探究学习
要点点击-蓝牙连接
声音传感器模块有1个3个针脚的接头,每个针脚的功能如下表:
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}模块
积木
用法说明
设置电机接口。首先设置电机的转速,取值范围为-255-255。255表示正转最大值,-255表示反转最大值。
要点点击-蓝牙连接
1.设置电机接口。
2.连接马达;找到主控制板的端口并连接马达。
3.在使用蓝牙之前,请先确保电池有电并打开开关。
4.创建蓝牙连接。
5.编写脚本。
单击蓝牙连连接并搜索蓝牙设备,找到名为“mukeblock”的蓝牙连热。连接成劝后,工具栏会发生变化。
要点点击-蓝牙连接
{21E4AEA4-8DFA-4A89-87EB-49C32662AFE0}想法
脚本
脚本描述
按键盘上的上移键,机器人向前移动,松开上移键,机器人停止移动。
只有按下上移键才有响应。
设置两台电机的转速为“100”。
松开上移键响应:
设置两台电机的转速为“0”,即停止移动。
要点点击-蓝牙连接
电机转速为“100”,“100”并不是真正意义上的速度值,而是便于我们操作的一个“范围值”。在这个值下,不同的电压或者不同的电机会产生不同的转速。这个“范围值”的取值范围是0-255我们可以理解为“0”的时候电机停止,“255”的时候电机达到当前电压下的最大转速。
跟小伙伴交流一下你是怎样连接蓝牙模块的。
交流分享
实践应用-调整机器人的行驶状态
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}想法
脚本
脚本描述
如果一个轮子正转,一个轮子不转,会怎么样?
当按下左移键的时候,设置左电机不转、右电机转动,实现小车向左转弯。(如果你的实验结果和以上效果相反,也没有错,只要记住和你的电机接口号对应的左右电机即可。)
如果一个轮子正转,一个轮子反转,会怎么样?
左轮向后转,右轮向前转,小车会较快地实现向左转。
1.你用到了哪些指令?
2.你的指令参数是怎样设计的?
交流分享
将超声波感应器安装在小车的前部,并连接主板。
定义模块指令:
实践应用-躲避障碍物
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}模块
积木
用法说明
创建模块指令,取名为“sound”。
点击数据和指令,新建模块指令,取名为“sound”。
编写脚本程序:
实践应用-躲避障碍物
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}模块
积木
用法说明
机器人移动的时候,会执行“cound”程序,如果超声波传感器侦测到前方有障碍物,蜂鸣器会发音报警。
如果超声波传感器感应到前方障碍物的距离小于10厘米,那么蜂鸣器会鸣响1秒钟。控制机器人移动时,执行“sound”程序。
谢 谢
同课章节目录