中图版七年级下册信息技术 5.5.2机器人识别轨迹 课件(29ppt)
文档属性
| 名称 | 中图版七年级下册信息技术 5.5.2机器人识别轨迹 课件(29ppt) |
|
|
| 格式 | ppt | ||
| 文件大小 | 4.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-12-08 00:00:00 | ||
图片预览
文档简介
——机器人识别轨迹
第五节 教会机器人感知
传 感 器
传感器是机器人的重要组成部分,就像人的感官,通过采集外界环境的数据,然后反馈回大脑进行处理。传感器通过连接线可以连接到主机控制器的输入端口上。
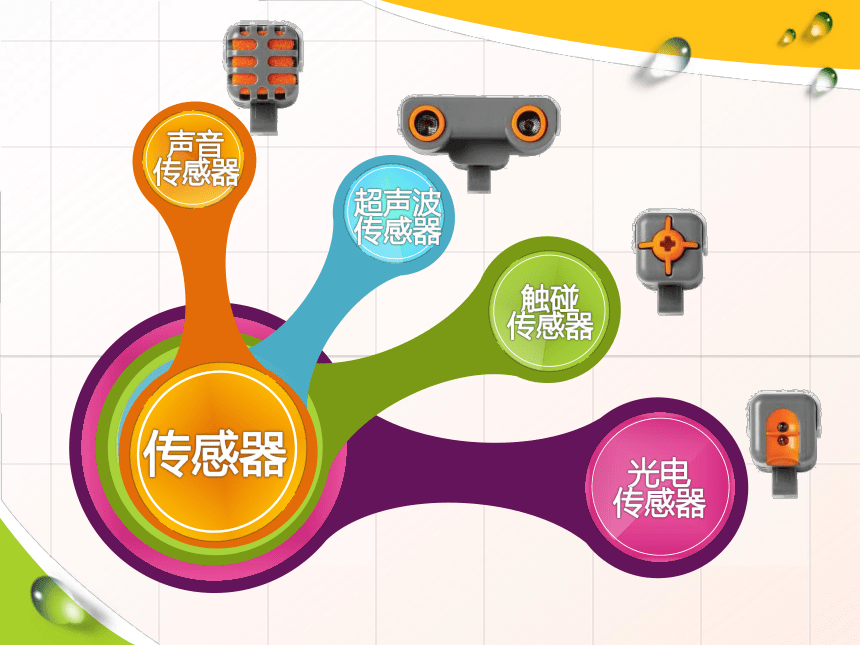
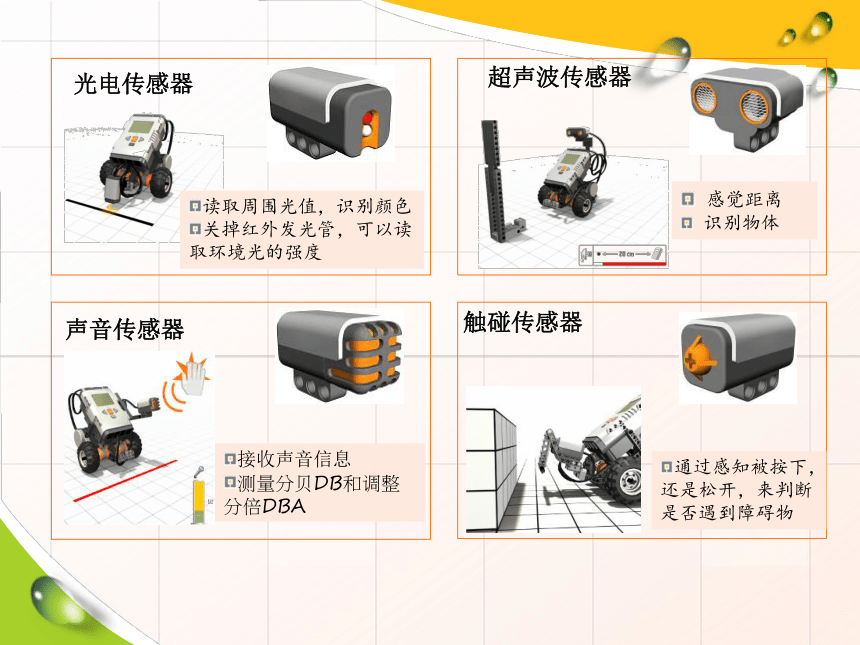
光电传感器
触碰传感器
声音传感器
超声波传感器
感觉距离
识别物体
通过感知被按下,还是松开,来判断是否遇到障碍物
读取周围光值,识别颜色
关掉红外发光管,可以读取环境光的强度
接收声音信息
测量分贝DB和调整分倍DBA
传感器
功能
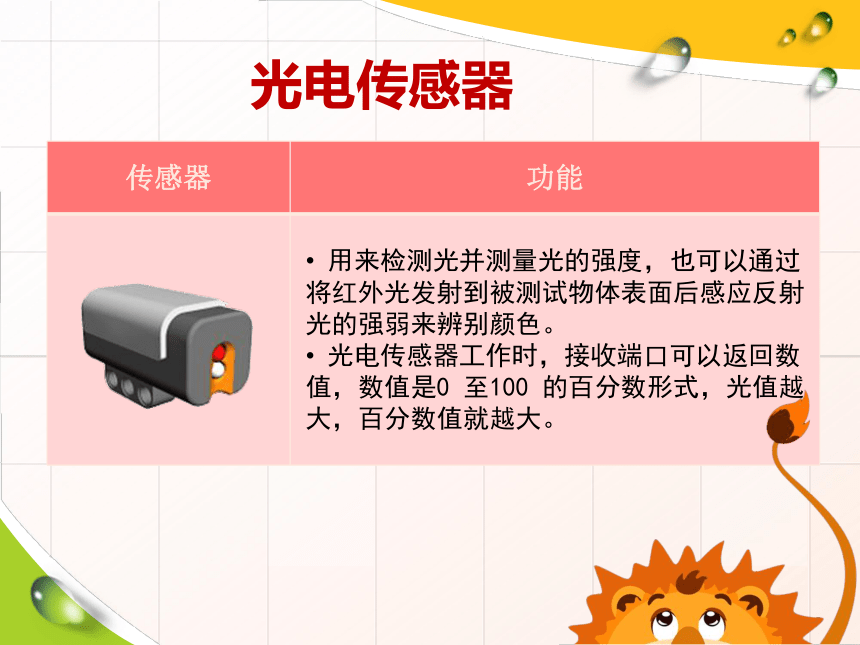
用来检测光并测量光的强度,也可以通过将红外光发射到被测试物体表面后感应反射光的强弱来辨别颜色。
光电传感器工作时,接收端口可以返回数值,数值是0 至100 的百分数形式,光值越大,百分数值就越大。
光电传感器
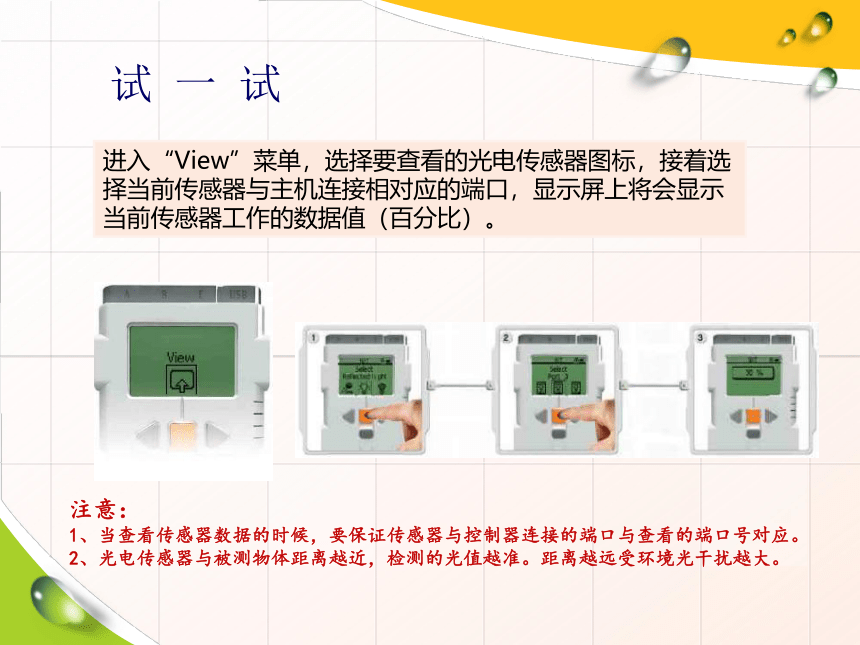
进入“View”菜单,选择要查看的光电传感器图标,接着选择当前传感器与主机连接相对应的端口,显示屏上将会显示当前传感器工作的数据值(百分比)。
注意:
1、当查看传感器数据的时候,要保证传感器与控制器连接的端口与查看的端口号对应。
2、光电传感器与被测物体距离越近,检测的光值越准。距离越远受环境光干扰越大。
试 一 试
测 一 测
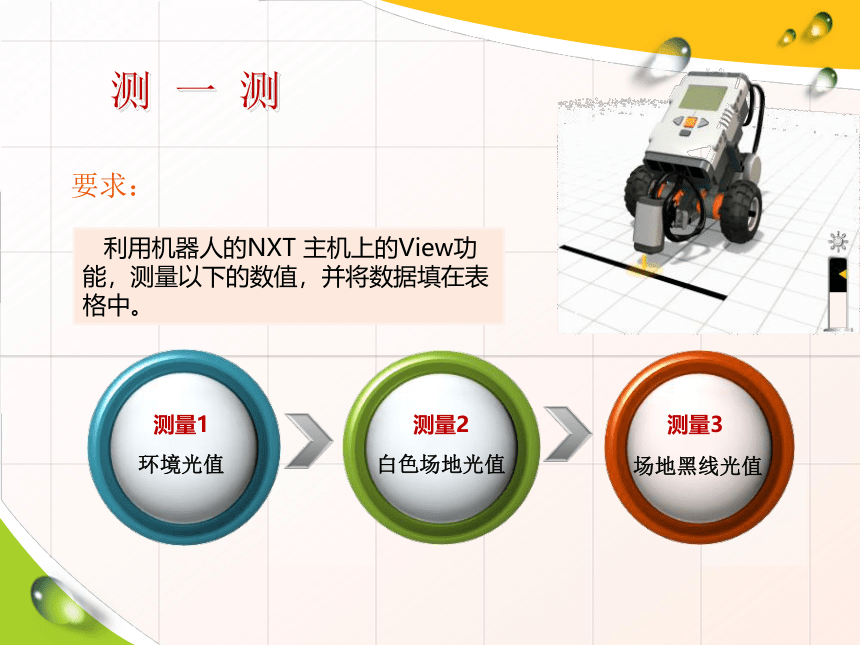
要求:
环境光值
场地黑线光值
测量1
测量2
白色场地光值
测量3
利用机器人的NXT 主机上的View功能,测量以下的数值,并将数据填在表格中。
想 一 想
在不同的光线下,比如关闭灯光或窗帘,所测的光值会不会发生变化?测试一下,证明你的推断对不对。将数据填入表格。
练 一 练
任务一、 “悬崖勒马”
注意:机器人的功率不能过大,即车速不能太快,否则会由于惯性冲出“悬崖”,使机器人受损。
描述:让你的机器人前进,直到悬崖边缘停下来。(光电传感器测到前方的光值达到某一数值时,立即停止前进)。
光感等待模块
1、测量光值
2、比较值=(白色光值+黑色光值)÷2
流程图:
开始
F
参考程序:
机器人前进的速度
比较值的确定
停止命令
机器人运动到“悬崖”边停不下来?
问题分析:
任务二、起跑线前停止
描述:当机器人在前进过程中,光电传感器测到前方的黑线时,则停止前进。
练 一 练
流程图:
开始
F
参考程序:
难度进阶
任务三、机器人巡线走
描述:让机器人沿着黑色轨迹行走。
效果演示
当光电传感器检测到 黑线左转,
白色右转
巡线原理
开始
F
右转
左转
T
流程图:
参考程序
挑 战 赛
比赛规则: 两组之间进行比赛,让机器人沿场地上的封闭黑线前进(偏离线路即为失败)。计时1分钟之内,谁追上另一方为胜, ,时间到即停止 机器人,哪方机器人与前方距离近即为胜利。选出最终优胜者。
场
地
示
意
图
课堂任务
能否完成
未能完成原因
解决方案
任务一:“悬崖勒马”
任务二:起跑线前停止
任务三:机器人巡线走
挑战赛
挑战赛取得名次
请给你们小组的机器人做个评价
评价反馈表
小 结
传感器的名称
传感器
功能
光电传感器
通过光电传感器可以读取周围光值,并可以识别颜色。可以从红外发射管的反射光来读值,数值是0至100的百分数形式,光值越大,百分数值越大。
生 活 中 的 应 用
生 活 中 的 应 用
思 维 拓 展
现实生活中还有那些地方、那些设备用到了光电传感器。
如果你来当设计师,利用光电传感器的功能,你能开发出一个什么样的设备?
谢 谢
第五节 教会机器人感知
传 感 器
传感器是机器人的重要组成部分,就像人的感官,通过采集外界环境的数据,然后反馈回大脑进行处理。传感器通过连接线可以连接到主机控制器的输入端口上。
光电传感器
触碰传感器
声音传感器
超声波传感器
感觉距离
识别物体
通过感知被按下,还是松开,来判断是否遇到障碍物
读取周围光值,识别颜色
关掉红外发光管,可以读取环境光的强度
接收声音信息
测量分贝DB和调整分倍DBA
传感器
功能
用来检测光并测量光的强度,也可以通过将红外光发射到被测试物体表面后感应反射光的强弱来辨别颜色。
光电传感器工作时,接收端口可以返回数值,数值是0 至100 的百分数形式,光值越大,百分数值就越大。
光电传感器
进入“View”菜单,选择要查看的光电传感器图标,接着选择当前传感器与主机连接相对应的端口,显示屏上将会显示当前传感器工作的数据值(百分比)。
注意:
1、当查看传感器数据的时候,要保证传感器与控制器连接的端口与查看的端口号对应。
2、光电传感器与被测物体距离越近,检测的光值越准。距离越远受环境光干扰越大。
试 一 试
测 一 测
要求:
环境光值
场地黑线光值
测量1
测量2
白色场地光值
测量3
利用机器人的NXT 主机上的View功能,测量以下的数值,并将数据填在表格中。
想 一 想
在不同的光线下,比如关闭灯光或窗帘,所测的光值会不会发生变化?测试一下,证明你的推断对不对。将数据填入表格。
练 一 练
任务一、 “悬崖勒马”
注意:机器人的功率不能过大,即车速不能太快,否则会由于惯性冲出“悬崖”,使机器人受损。
描述:让你的机器人前进,直到悬崖边缘停下来。(光电传感器测到前方的光值达到某一数值时,立即停止前进)。
光感等待模块
1、测量光值
2、比较值=(白色光值+黑色光值)÷2
流程图:
开始
F
参考程序:
机器人前进的速度
比较值的确定
停止命令
机器人运动到“悬崖”边停不下来?
问题分析:
任务二、起跑线前停止
描述:当机器人在前进过程中,光电传感器测到前方的黑线时,则停止前进。
练 一 练
流程图:
开始
F
参考程序:
难度进阶
任务三、机器人巡线走
描述:让机器人沿着黑色轨迹行走。
效果演示
当光电传感器检测到 黑线左转,
白色右转
巡线原理
开始
F
右转
左转
T
流程图:
参考程序
挑 战 赛
比赛规则: 两组之间进行比赛,让机器人沿场地上的封闭黑线前进(偏离线路即为失败)。计时1分钟之内,谁追上另一方为胜, ,时间到即停止 机器人,哪方机器人与前方距离近即为胜利。选出最终优胜者。
场
地
示
意
图
课堂任务
能否完成
未能完成原因
解决方案
任务一:“悬崖勒马”
任务二:起跑线前停止
任务三:机器人巡线走
挑战赛
挑战赛取得名次
请给你们小组的机器人做个评价
评价反馈表
小 结
传感器的名称
传感器
功能
光电传感器
通过光电传感器可以读取周围光值,并可以识别颜色。可以从红外发射管的反射光来读值,数值是0至100的百分数形式,光值越大,百分数值越大。
生 活 中 的 应 用
生 活 中 的 应 用
思 维 拓 展
现实生活中还有那些地方、那些设备用到了光电传感器。
如果你来当设计师,利用光电传感器的功能,你能开发出一个什么样的设备?
谢 谢
同课章节目录