苏科版(2015)信息技术六年级 第7课 机器人沿线行走 课件(15张PPT)
文档属性
| 名称 | 苏科版(2015)信息技术六年级 第7课 机器人沿线行走 课件(15张PPT) |
|
|
| 格式 | ppt | ||
| 文件大小 | 1.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-12-21 00:00:00 | ||
图片预览

文档简介
机器人沿线行走
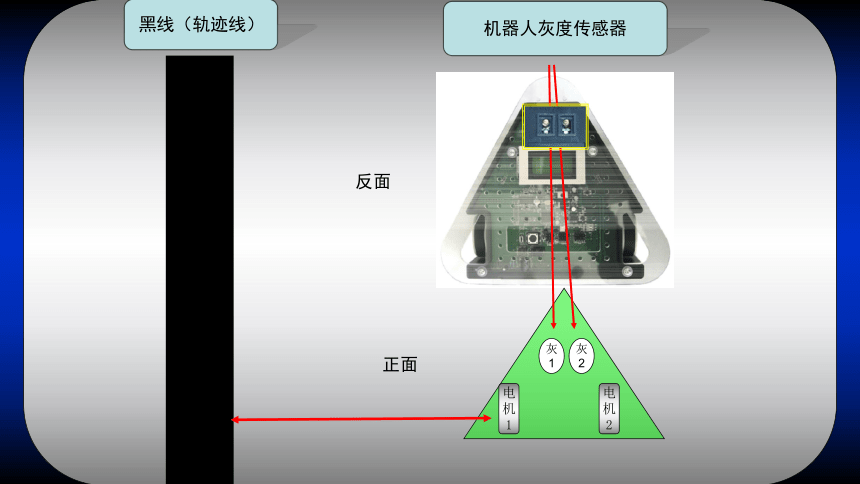
机器人灰度传感器
黑线(轨迹线)
电
机
1
电
机
2
灰
1
灰
2
反面
正面
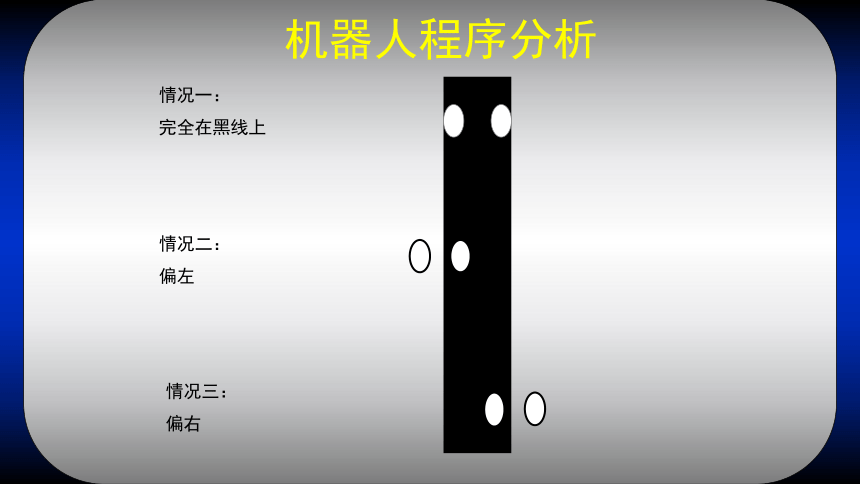
机器人程序分析
情况三:
偏右
情况二:
偏左
情况一:
完全在黑线上
电
机
1
电
机
2
灰
1
灰
2
灰度1测到为 色
灰度2测到为 色
情况一:完全在黑线上
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
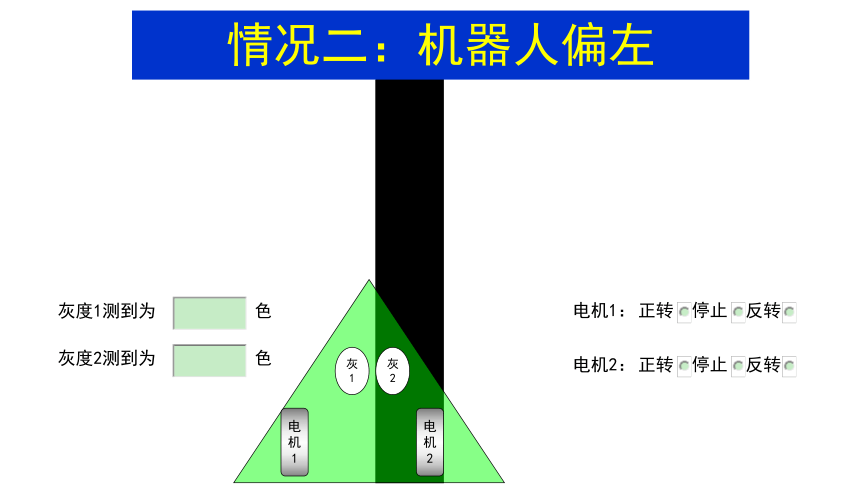
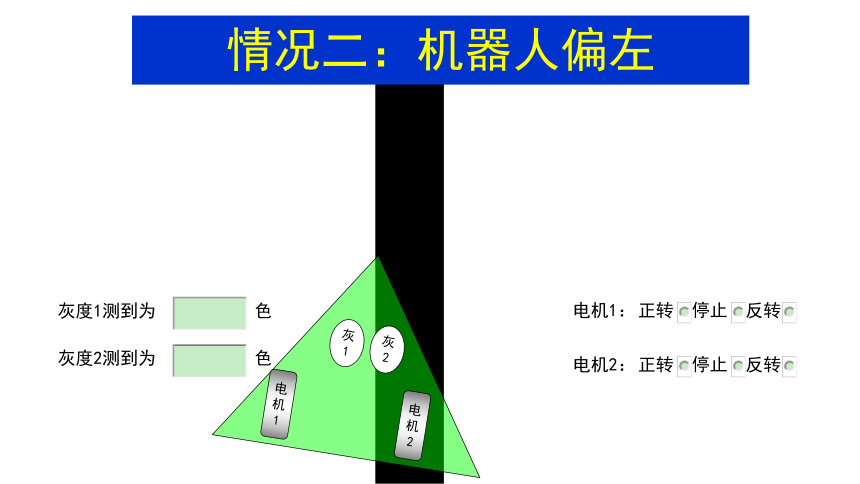
情况二:机器人偏左
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
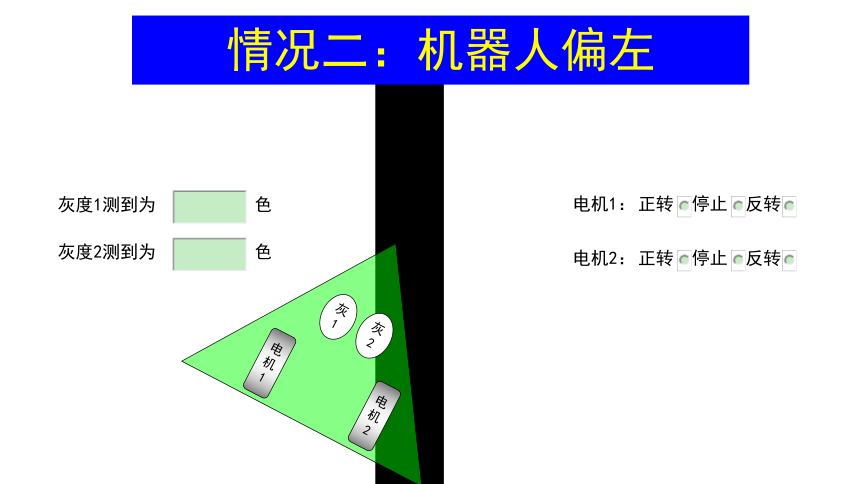
情况二:机器人偏左
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况二:机器人偏左
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
灰
1
灰
2
灰
1
情况三:机器人偏右
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况三:机器人偏右
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况三:机器人偏右
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
情况三:左边在黑线、右边在白线
情况二:左边在白线、右边在黑线
情况一:完全在黑线内
灰度传感器设置
机器人偏右
电机1:停止
电机2:前进
机器人在线上
电机1:前进
电机2:前进
全
部
程
序
机器人偏左
电机1:前进
电机2:停止
纠正程序
选择场地
拓展场地
机
器
人
思
考
程
序
机器人灰度传感器
黑线(轨迹线)
电
机
1
电
机
2
灰
1
灰
2
反面
正面
机器人程序分析
情况三:
偏右
情况二:
偏左
情况一:
完全在黑线上
电
机
1
电
机
2
灰
1
灰
2
灰度1测到为 色
灰度2测到为 色
情况一:完全在黑线上
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况二:机器人偏左
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况二:机器人偏左
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况二:机器人偏左
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
灰
1
灰
2
灰
1
情况三:机器人偏右
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况三:机器人偏右
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
电
机
1
电
机
2
灰
1
灰
2
情况三:机器人偏右
灰度1测到为 色
灰度2测到为 色
电机1:
正转 停止 反转
电机2:
正转 停止 反转
情况三:左边在黑线、右边在白线
情况二:左边在白线、右边在黑线
情况一:完全在黑线内
灰度传感器设置
机器人偏右
电机1:停止
电机2:前进
机器人在线上
电机1:前进
电机2:前进
全
部
程
序
机器人偏左
电机1:前进
电机2:停止
纠正程序
选择场地
拓展场地
机
器
人
思
考
程
序