浙教版九年级科学上册 3.4简单机械优化提高训练
文档属性
| 名称 | 浙教版九年级科学上册 3.4简单机械优化提高训练 | 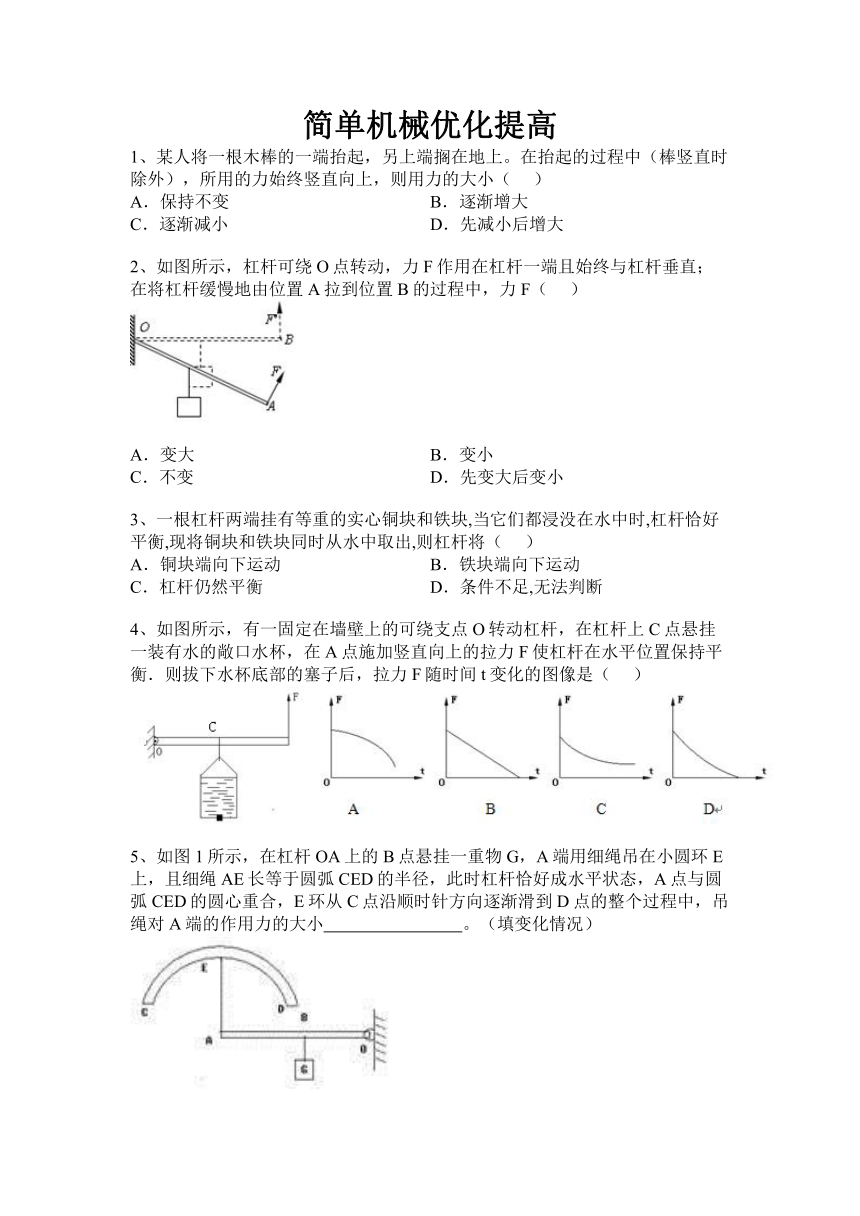 | |
| 格式 | zip | ||
| 文件大小 | 160.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2021-01-11 07:20:23 | ||
图片预览
文档简介
简单机械优化提高
1、某人将一根木棒的一端抬起,另上端搁在地上。在抬起的过程中(棒竖直时除外),所用的力始终竖直向上,则用力的大小(
)
A.保持不变
B.逐渐增大
C.逐渐减小
D.先减小后增大
2、如图所示,杠杆可绕O点转动,力F作用在杠杆一端且始终与杠杆垂直;在将杠杆缓慢地由位置A拉到位置B的过程中,力F(
)
A.变大
B.变小
C.不变
D.先变大后变小
3、一根杠杆两端挂有等重的实心铜块和铁块,当它们都浸没在水中时,杠杆恰好平衡,现将铜块和铁块同时从水中取出,则杠杆将(
)
A.铜块端向下运动
B.铁块端向下运动
C.杠杆仍然平衡
D.条件不足,无法判断
4、如图所示,有一固定在墙壁上的可绕支点O转动杠杆,在杠杆上C点悬挂一装有水的敞口水杯,在A点施加竖直向上的拉力F使杠杆在水平位置保持平衡.则拔下水杯底部的塞子后,拉力F随时间t变化的图像是(
)
5、如图1所示,在杠杆OA上的B点悬挂一重物G,A端用细绳吊在小圆环E上,且细绳AE长等于圆弧CED的半径,此时杠杆恰好成水平状态,A点与圆弧CED的圆心重合,E环从C点沿顺时针方向逐渐滑到D点的整个过程中,吊绳对A端的作用力的大小??????
。(填变化情况)
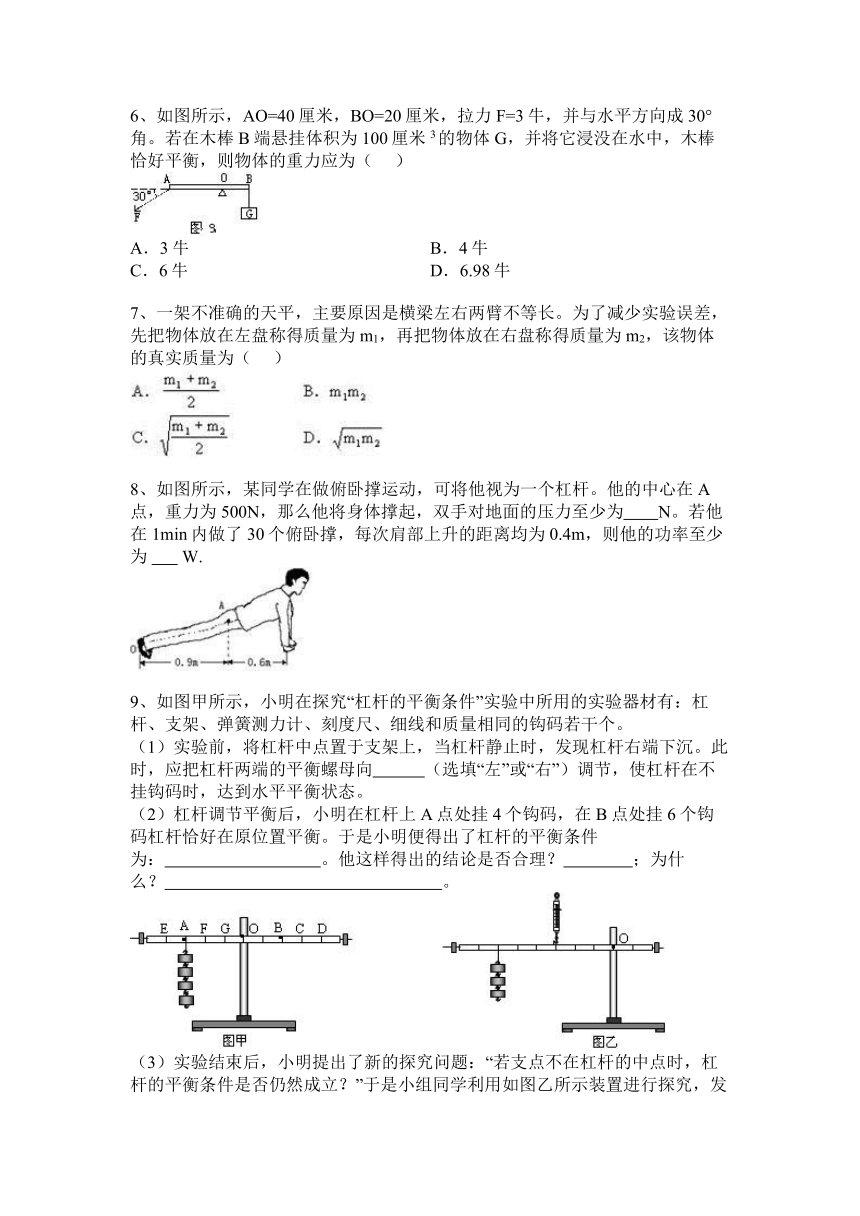
6、如图所示,AO=40厘米,BO=20厘米,拉力F=3牛,并与水平方向成30°角。若在木棒B端悬挂体积为100厘米3的物体G,并将它浸没在水中,木棒恰好平衡,则物体的重力应为(
)
A.3牛
B.4牛
C.6牛
D.6.98牛
7、一架不准确的天平,主要原因是横梁左右两臂不等长。为了减少实验误差,先把物体放在左盘称得质量为m1,再把物体放在右盘称得质量为m2,该物体的真实质量为(
)
8、如图所示,某同学在做俯卧撑运动,可将他视为一个杠杆。他的中心在A点,重力为500N,那么他将身体撑起,双手对地面的压力至少为????????N。若他在1min内做了30个俯卧撑,每次肩部上升的距离均为0.4m,则他的功率至少为
???????W.
9、如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,达到水平平衡状态。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为: 。他这样得出的结论是否合理? ;为什么? 。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是:
。
(4)实验时只有8个相同的钩码,杠杆上每格等距,如图甲,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①.____________________???????
_?????
__;②_________________???????????
_______????。
(5)杠杆不处于水平位置能否平衡?甲乙意见不同。甲认为能平衡。于是他让每次杠杆倾斜时静止,做这个实验也得出了杠杆平衡条件。甲认为杠杆平衡不一定是水平的,这种说法对吗????????????????(选填对或错),甲这种方案与乙让杠杆在水平位置做实验的方案相比较,你认为哪个实验方案好,并说明理由:______实验方案好;理由是?????????????????????????????????。
10、在探究杠杆平衡条件的实验中:
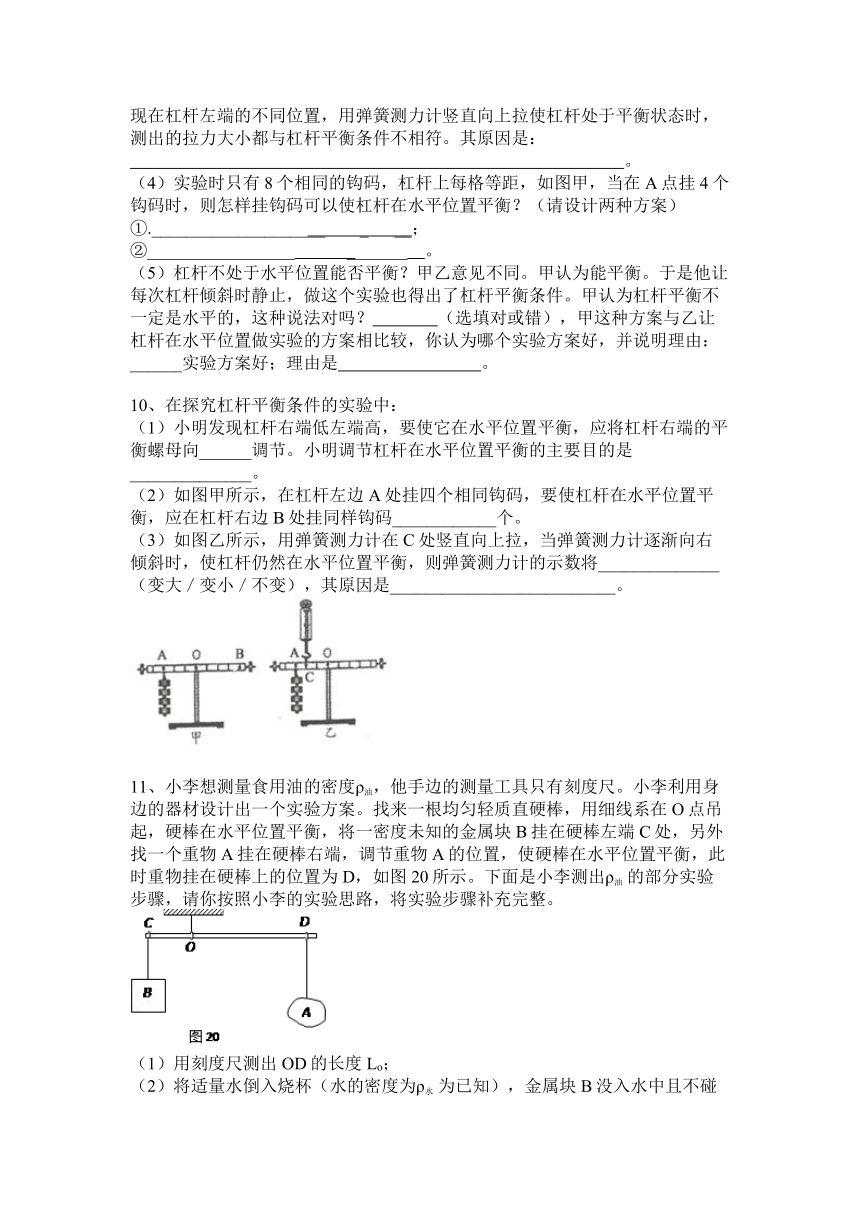
(1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向______调节。小明调节杠杆在水平位置平衡的主要目的是______________。
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码____________个。
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将______________(变大/变小/不变),其原因是__________________________。
11、小李想测量食用油的密度ρ油,他手边的测量工具只有刻度尺。小李利用身边的器材设计出一个实验方案。找来一根均匀轻质直硬棒,用细线系在O点吊起,硬棒在水平位置平衡,将一密度未知的金属块B挂在硬棒左端C处,另外找一个重物A挂在硬棒右端,调节重物A的位置,使硬棒在水平位置平衡,此时重物挂在硬棒上的位置为D,如图20所示。下面是小李测出ρ油
的部分实验步骤,请你按照小李的实验思路,将实验步骤补充完整。
(1)用刻度尺测出OD的长度Lo;
(2)将适量水倒入烧杯(水的密度为ρ水
为已知),金属块B没入水中且不碰烧杯,把重物A从D处移动到E处时(E点未标出),硬棒再次在水平位置平衡,??????????????????,将金属块B取出并将水擦干;
(3)将适量油倒入另一烧杯,??????????????,将重物A从E处移动到F处时,硬棒再次在水平位置平衡,?????????????????,将金属块B取出,用抹布擦干;??
(4)利用上述测量出的物理量和题中的已知量计算的表达式为:____________?。
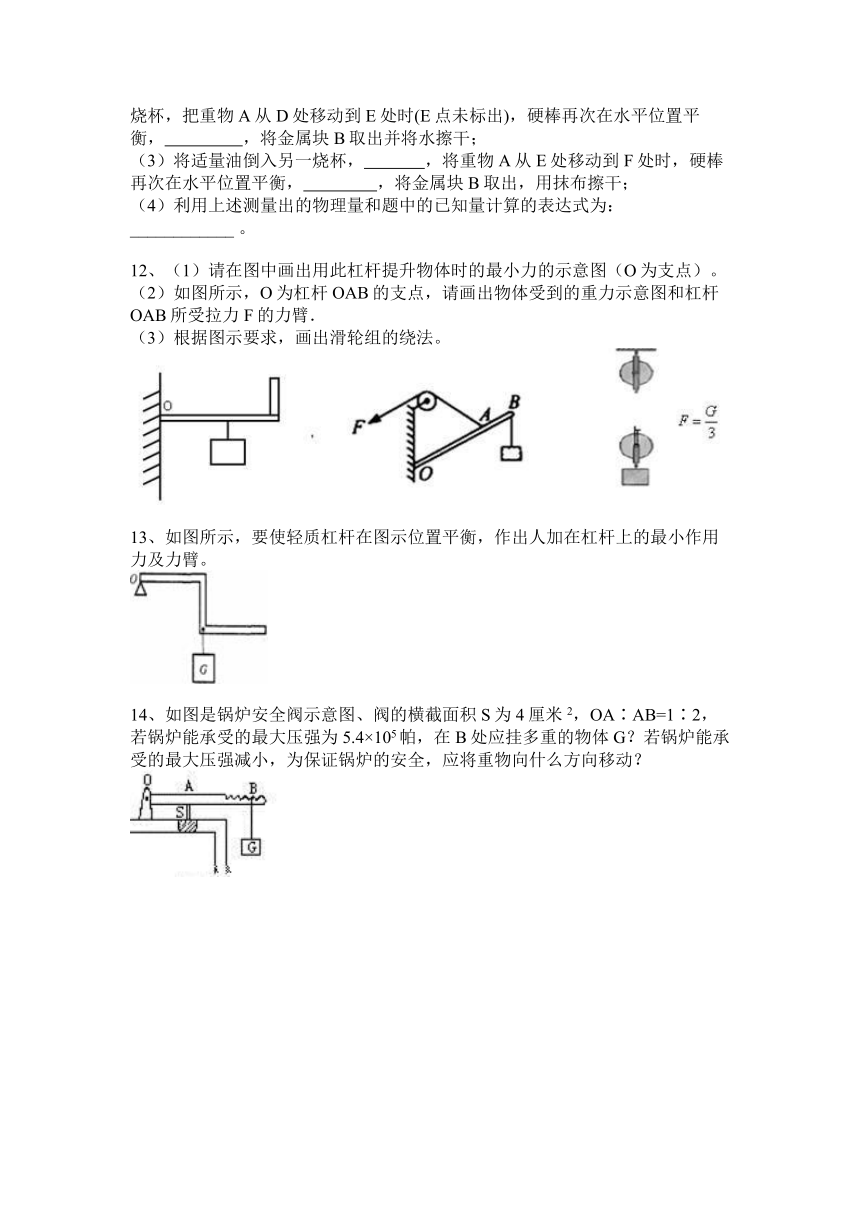
12、(1)请在图中画出用此杠杆提升物体时的最小力的示意图(O为支点)。
(2)如图所示,O为杠杆OAB的支点,请画出物体受到的重力示意图和杠杆OAB所受拉力F的力臂.
(3)根据图示要求,画出滑轮组的绕法。
13、如图所示,要使轻质杠杆在图示位置平衡,作出人加在杠杆上的最小作用力及力臂。
14、如图是锅炉安全阀示意图、阀的横截面积S为4厘米2,OA∶AB=1∶2,若锅炉能承受的最大压强为5.4×105帕,在B处应挂多重的物体G?若锅炉能承受的最大压强减小,为保证锅炉的安全,应将重物向什么方向移动?
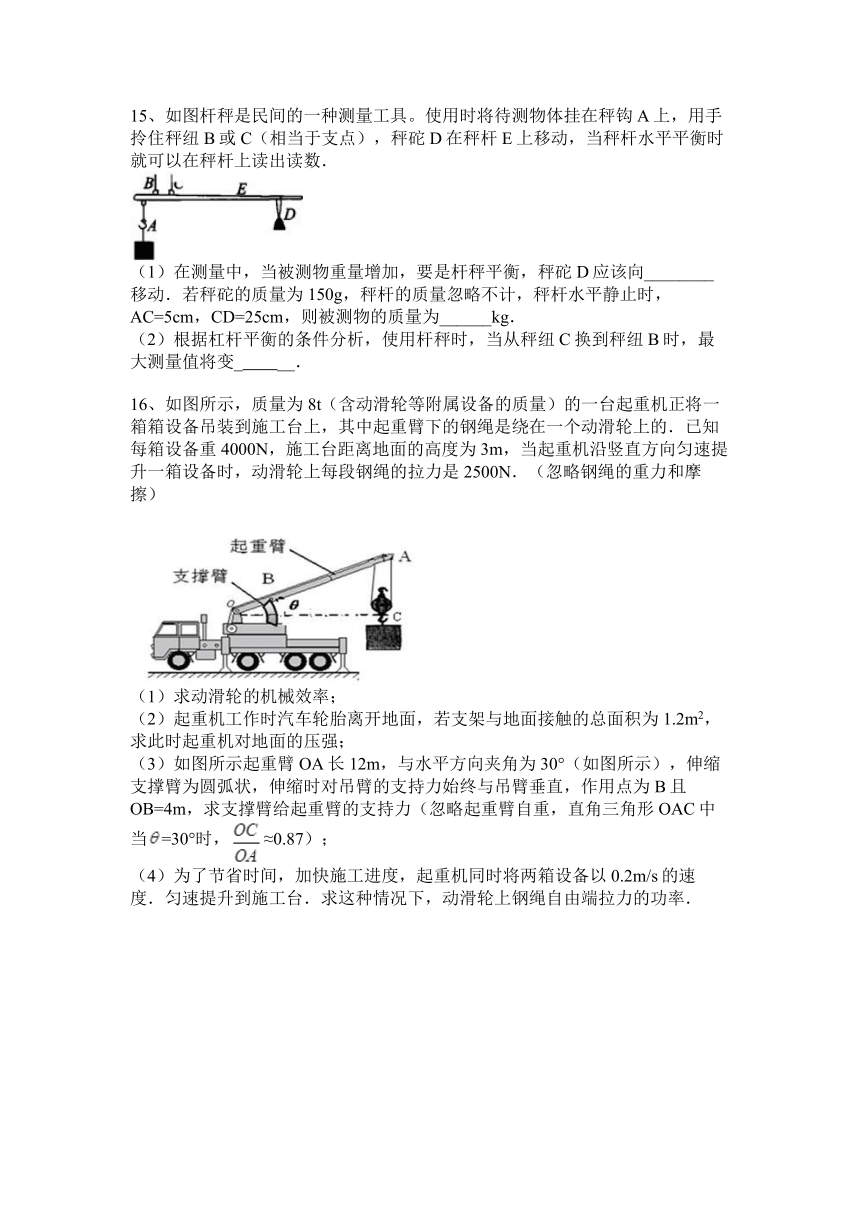
15、如图杆秤是民间的一种测量工具。使用时将待测物体挂在秤钩A上,用手拎住秤纽B或C(相当于支点),秤砣D在秤杆E上移动,当秤杆水平平衡时就可以在秤杆上读出读数.
(1)在测量中,当被测物重量增加,要是杆秤平衡,秤砣D应该向________移动.若秤砣的质量为150g,秤杆的质量忽略不计,秤杆水平静止时,AC=5cm,CD=25cm,则被测物的质量为______kg.
(2)根据杠杆平衡的条件分析,使用杆秤时,当从秤纽C换到秤纽B时,最大测量值将变_????????__.
16、如图所示,质量为8t(含动滑轮等附属设备的质量)的一台起重机正将一箱箱设备吊装到施工台上,其中起重臂下的钢绳是绕在一个动滑轮上的.已知每箱设备重4000N,施工台距离地面的高度为3m,当起重机沿竖直方向匀速提升一箱设备时,动滑轮上每段钢绳的拉力是2500N.(忽略钢绳的重力和摩擦)
(1)求动滑轮的机械效率;
(2)起重机工作时汽车轮胎离开地面,若支架与地面接触的总面积为1.2m2,求此时起重机对地面的压强;
(3)如图所示起重臂OA长12m,与水平方向夹角为30°(如图所示),伸缩支撑臂为圆弧状,伸缩时对吊臂的支持力始终与吊臂垂直,作用点为B且OB=4m,求支撑臂给起重臂的支持力(忽略起重臂自重,直角三角形OAC中当=30°时,≈0.87);
(4)为了节省时间,加快施工进度,起重机同时将两箱设备以0.2m/s的速度.匀速提升到施工台.求这种情况下,动滑轮上钢绳自由端拉力的功率.
17、如图所示,正方体合金块A的边长为0.2m,把它挂在以O为支点的轻质杠杆的M点处,在A的下方放置一个由同种材料制成的边长为0.1m的立方体B,物体B放置在水平地面上;OM:ON
=1:3。一个重为640N的人在杠杆的N点通过滑轮组(每个滑轮的自重均为20N)用力F1使杠杆在水平位置平衡,此时A对B的压强为=1.4×104Pa,人对水平地面的压强为=1.45×104Pa;若人用力F2=80N仍使杠杆在水平位置平衡,此时物体B对地面的压强为。已知人单独站在水平地面上,对地面的压强为1.6×104
Pa。(g取10N/kg)求:
(1)力F1的大小;
(2)合金块的密度;
(3)压强的大小
18、(8分)小明设计了一个测量物体质量的“托盘秤”,图甲是其原理示意图,其中托盘上放置物体,压力传感器R的电阻值会随所受压力大小发生变化,杠杆ABO可绕0点转动,电压表的量程为O~3V(可显示质量大小)。已知OB:BA=1:2,电阻R0=100?。压力传感器R表面能承受的最大压力为400N,该压力传感器能承受的最大压强为2×106
Pa,压力传感器R的电阻值随所受压力变化的图像如图18-乙所示。电源电压恒定不变,秤达到最大称量时,电压表的示数也达到最大值,托盘和杠杆组件的质量忽略不计。求:
(1)当托盘上没有放物体称量时R的大小;
(2)压杆与压力传感器的接触面积;
(3)托盘秤的最大称量;
(4)当托盘秤达到最大称量时R消耗的功率。
19、一绝缘细绳的一端与可绕O点转动的轻质杠杆的E端相连,另一端绕过滑轮D与C与滑动变阻器的滑片P相连;B为一可导电的轻质弹簧,如图所示接入电路中,一端通过绝缘绳固定在地面上,另一端与滑片P相连;一人站在地面上拉住与杠杆H端相连的细绳。已知电源电压为8V,灯泡标有“6V、3W”字样,人的质量为70kg,人与地面的接触面积为150cm2,。当开关S闭合、人对绳子拉力最小时,电流表的示数为,且滑片刚好位于滑动变阻器的a端;当人对绳子拉力最大时,电流表示数为,且,滑动变阻器的阻值与弹簧所受拉力的关系如下表所示:
?
0
2
4
6
8
10
12
14
……
?
0.5
50.5
100.5
150.5
200.5
250.5
300.5
350.5
……
若不计杠杆、弹簧、滑片、细绳的重力,不计摩擦,不计弹簧电阻。整套装置始终处于平衡状态,物体A始终不离开地面。灯泡电阻不变,且不会被烧坏。取g=10N/kg。则下列选项中错误的是
A.人的拉力最大时,滑动变阻器接入电路的阻值是12Ω
B.物体A的质量是60kg
C.人的拉力最大时,人对地面的压强是?
D.当灯泡正常发光时,物体A对地面的压力是400N
20、如图甲所示,正方体A边长0.2m,作为配重使用,杠杆OE:OF=2:3,某同学用这个装置和一个密闭容器D提取水中的圆柱体B,
圆柱体B的体积是密闭容器D的;旁边浮体C的体积是0.1m3,该同学站在浮体C上,总体积的浸入水中;该同学用力拉动滑轮组绕绳自由端,手拉绳的功率P和密闭容器D匀速被提升的距离关系如图24乙所示;密闭容器D上升速度0.05m/s保持不变,密闭容器D被提出水后,圆柱体B从密闭容器D中取出放在浮体C的上面,同时手松开绳子时,浮体C露出水面的体积减少总体积的;在提升全过程中,配重A始终没有离开地面。两个定滑轮总重10
N.(绳的重力,滑轮与轴的摩擦及水的阻力不计。g=10N/kg),求:(7分)
(1)圆柱体B的重力;
(2)密闭容器D离开水面时,滑轮组提升重物B的机械效率;(百分号前面保留整数);
(3)圆柱体B的密度;
(4)在提升全过程中配重A对地面的压强的最大变化量。
答案
1、【答案】
A
2、【答案】
A
3、【答案】
B
4、【答案】
C
5、【答案】
先变小后变大
6、【答案】
B
7、【答案】
D
8、【答案】
300?
60
9、【答案】
(1)左?(2)动力×动力臂=阻力×阻力臂?不合理?实验次数太少,不具有普遍性?(3)杠杆自重对实验有影响?(4)在C点挂4个钩码?在D点挂3个钩码??(5)对?乙?乙便于测量力臂
10、【答案】
(1)左??便于准确测量力臂?(2)3?(3)变大???在阻力与阻力臂一定时,动力臂变小,则动力变大
11、【答案】
(2)?用刻度尺测出OE的长度L1??????;
12、【答案】
答案如图下图所示
13、【答案】
14、【答案】
59N,向左
15、【答案】
右?
0.75??大
16、【答案】
(1)80%;(2)70000Pa;(3)13050N;(4)1800W.
17、【答案】
(1)60N(2)?(3)
7500pa
18、【答案】
(1)托盘上没放物时F="0"
N,从图17-乙可知
R="450"
Ω-----------1分
(2)S=
F/P=400/2×106=0.0002(m2)----------------2分
(3)当传感器受到最大压力F=400N时,秤达到最大称量。
由
OB:BA="1:2?"
得OA:OB=3:1
由杠杆平衡条件得:mg×OB=
F×OA
m=
F×OA/(g×OB)=400×3/(10×1)=120(kg)-------
2分
(4)从图17-乙可知F=400N时R="50"
Ω?
UO=3V
I=IO=UO/RO=3/100=0.03(A)
P=I2R=0.032×50="0.045(w)------"
2分
19、【答案】
C
20、【答案】
(1)200N(2)83%(3)(4)
1、某人将一根木棒的一端抬起,另上端搁在地上。在抬起的过程中(棒竖直时除外),所用的力始终竖直向上,则用力的大小(
)
A.保持不变
B.逐渐增大
C.逐渐减小
D.先减小后增大
2、如图所示,杠杆可绕O点转动,力F作用在杠杆一端且始终与杠杆垂直;在将杠杆缓慢地由位置A拉到位置B的过程中,力F(
)
A.变大
B.变小
C.不变
D.先变大后变小
3、一根杠杆两端挂有等重的实心铜块和铁块,当它们都浸没在水中时,杠杆恰好平衡,现将铜块和铁块同时从水中取出,则杠杆将(
)
A.铜块端向下运动
B.铁块端向下运动
C.杠杆仍然平衡
D.条件不足,无法判断
4、如图所示,有一固定在墙壁上的可绕支点O转动杠杆,在杠杆上C点悬挂一装有水的敞口水杯,在A点施加竖直向上的拉力F使杠杆在水平位置保持平衡.则拔下水杯底部的塞子后,拉力F随时间t变化的图像是(
)
5、如图1所示,在杠杆OA上的B点悬挂一重物G,A端用细绳吊在小圆环E上,且细绳AE长等于圆弧CED的半径,此时杠杆恰好成水平状态,A点与圆弧CED的圆心重合,E环从C点沿顺时针方向逐渐滑到D点的整个过程中,吊绳对A端的作用力的大小??????
。(填变化情况)
6、如图所示,AO=40厘米,BO=20厘米,拉力F=3牛,并与水平方向成30°角。若在木棒B端悬挂体积为100厘米3的物体G,并将它浸没在水中,木棒恰好平衡,则物体的重力应为(
)
A.3牛
B.4牛
C.6牛
D.6.98牛
7、一架不准确的天平,主要原因是横梁左右两臂不等长。为了减少实验误差,先把物体放在左盘称得质量为m1,再把物体放在右盘称得质量为m2,该物体的真实质量为(
)
8、如图所示,某同学在做俯卧撑运动,可将他视为一个杠杆。他的中心在A点,重力为500N,那么他将身体撑起,双手对地面的压力至少为????????N。若他在1min内做了30个俯卧撑,每次肩部上升的距离均为0.4m,则他的功率至少为
???????W.
9、如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,达到水平平衡状态。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为: 。他这样得出的结论是否合理? ;为什么? 。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是:
。
(4)实验时只有8个相同的钩码,杠杆上每格等距,如图甲,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①.____________________???????
_?????
__;②_________________???????????
_______????。
(5)杠杆不处于水平位置能否平衡?甲乙意见不同。甲认为能平衡。于是他让每次杠杆倾斜时静止,做这个实验也得出了杠杆平衡条件。甲认为杠杆平衡不一定是水平的,这种说法对吗????????????????(选填对或错),甲这种方案与乙让杠杆在水平位置做实验的方案相比较,你认为哪个实验方案好,并说明理由:______实验方案好;理由是?????????????????????????????????。
10、在探究杠杆平衡条件的实验中:
(1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向______调节。小明调节杠杆在水平位置平衡的主要目的是______________。
(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码____________个。
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将______________(变大/变小/不变),其原因是__________________________。
11、小李想测量食用油的密度ρ油,他手边的测量工具只有刻度尺。小李利用身边的器材设计出一个实验方案。找来一根均匀轻质直硬棒,用细线系在O点吊起,硬棒在水平位置平衡,将一密度未知的金属块B挂在硬棒左端C处,另外找一个重物A挂在硬棒右端,调节重物A的位置,使硬棒在水平位置平衡,此时重物挂在硬棒上的位置为D,如图20所示。下面是小李测出ρ油
的部分实验步骤,请你按照小李的实验思路,将实验步骤补充完整。
(1)用刻度尺测出OD的长度Lo;
(2)将适量水倒入烧杯(水的密度为ρ水
为已知),金属块B没入水中且不碰烧杯,把重物A从D处移动到E处时(E点未标出),硬棒再次在水平位置平衡,??????????????????,将金属块B取出并将水擦干;
(3)将适量油倒入另一烧杯,??????????????,将重物A从E处移动到F处时,硬棒再次在水平位置平衡,?????????????????,将金属块B取出,用抹布擦干;??
(4)利用上述测量出的物理量和题中的已知量计算的表达式为:____________?。
12、(1)请在图中画出用此杠杆提升物体时的最小力的示意图(O为支点)。
(2)如图所示,O为杠杆OAB的支点,请画出物体受到的重力示意图和杠杆OAB所受拉力F的力臂.
(3)根据图示要求,画出滑轮组的绕法。
13、如图所示,要使轻质杠杆在图示位置平衡,作出人加在杠杆上的最小作用力及力臂。
14、如图是锅炉安全阀示意图、阀的横截面积S为4厘米2,OA∶AB=1∶2,若锅炉能承受的最大压强为5.4×105帕,在B处应挂多重的物体G?若锅炉能承受的最大压强减小,为保证锅炉的安全,应将重物向什么方向移动?
15、如图杆秤是民间的一种测量工具。使用时将待测物体挂在秤钩A上,用手拎住秤纽B或C(相当于支点),秤砣D在秤杆E上移动,当秤杆水平平衡时就可以在秤杆上读出读数.
(1)在测量中,当被测物重量增加,要是杆秤平衡,秤砣D应该向________移动.若秤砣的质量为150g,秤杆的质量忽略不计,秤杆水平静止时,AC=5cm,CD=25cm,则被测物的质量为______kg.
(2)根据杠杆平衡的条件分析,使用杆秤时,当从秤纽C换到秤纽B时,最大测量值将变_????????__.
16、如图所示,质量为8t(含动滑轮等附属设备的质量)的一台起重机正将一箱箱设备吊装到施工台上,其中起重臂下的钢绳是绕在一个动滑轮上的.已知每箱设备重4000N,施工台距离地面的高度为3m,当起重机沿竖直方向匀速提升一箱设备时,动滑轮上每段钢绳的拉力是2500N.(忽略钢绳的重力和摩擦)
(1)求动滑轮的机械效率;
(2)起重机工作时汽车轮胎离开地面,若支架与地面接触的总面积为1.2m2,求此时起重机对地面的压强;
(3)如图所示起重臂OA长12m,与水平方向夹角为30°(如图所示),伸缩支撑臂为圆弧状,伸缩时对吊臂的支持力始终与吊臂垂直,作用点为B且OB=4m,求支撑臂给起重臂的支持力(忽略起重臂自重,直角三角形OAC中当=30°时,≈0.87);
(4)为了节省时间,加快施工进度,起重机同时将两箱设备以0.2m/s的速度.匀速提升到施工台.求这种情况下,动滑轮上钢绳自由端拉力的功率.
17、如图所示,正方体合金块A的边长为0.2m,把它挂在以O为支点的轻质杠杆的M点处,在A的下方放置一个由同种材料制成的边长为0.1m的立方体B,物体B放置在水平地面上;OM:ON
=1:3。一个重为640N的人在杠杆的N点通过滑轮组(每个滑轮的自重均为20N)用力F1使杠杆在水平位置平衡,此时A对B的压强为=1.4×104Pa,人对水平地面的压强为=1.45×104Pa;若人用力F2=80N仍使杠杆在水平位置平衡,此时物体B对地面的压强为。已知人单独站在水平地面上,对地面的压强为1.6×104
Pa。(g取10N/kg)求:
(1)力F1的大小;
(2)合金块的密度;
(3)压强的大小
18、(8分)小明设计了一个测量物体质量的“托盘秤”,图甲是其原理示意图,其中托盘上放置物体,压力传感器R的电阻值会随所受压力大小发生变化,杠杆ABO可绕0点转动,电压表的量程为O~3V(可显示质量大小)。已知OB:BA=1:2,电阻R0=100?。压力传感器R表面能承受的最大压力为400N,该压力传感器能承受的最大压强为2×106
Pa,压力传感器R的电阻值随所受压力变化的图像如图18-乙所示。电源电压恒定不变,秤达到最大称量时,电压表的示数也达到最大值,托盘和杠杆组件的质量忽略不计。求:
(1)当托盘上没有放物体称量时R的大小;
(2)压杆与压力传感器的接触面积;
(3)托盘秤的最大称量;
(4)当托盘秤达到最大称量时R消耗的功率。
19、一绝缘细绳的一端与可绕O点转动的轻质杠杆的E端相连,另一端绕过滑轮D与C与滑动变阻器的滑片P相连;B为一可导电的轻质弹簧,如图所示接入电路中,一端通过绝缘绳固定在地面上,另一端与滑片P相连;一人站在地面上拉住与杠杆H端相连的细绳。已知电源电压为8V,灯泡标有“6V、3W”字样,人的质量为70kg,人与地面的接触面积为150cm2,。当开关S闭合、人对绳子拉力最小时,电流表的示数为,且滑片刚好位于滑动变阻器的a端;当人对绳子拉力最大时,电流表示数为,且,滑动变阻器的阻值与弹簧所受拉力的关系如下表所示:
?
0
2
4
6
8
10
12
14
……
?
0.5
50.5
100.5
150.5
200.5
250.5
300.5
350.5
……
若不计杠杆、弹簧、滑片、细绳的重力,不计摩擦,不计弹簧电阻。整套装置始终处于平衡状态,物体A始终不离开地面。灯泡电阻不变,且不会被烧坏。取g=10N/kg。则下列选项中错误的是
A.人的拉力最大时,滑动变阻器接入电路的阻值是12Ω
B.物体A的质量是60kg
C.人的拉力最大时,人对地面的压强是?
D.当灯泡正常发光时,物体A对地面的压力是400N
20、如图甲所示,正方体A边长0.2m,作为配重使用,杠杆OE:OF=2:3,某同学用这个装置和一个密闭容器D提取水中的圆柱体B,
圆柱体B的体积是密闭容器D的;旁边浮体C的体积是0.1m3,该同学站在浮体C上,总体积的浸入水中;该同学用力拉动滑轮组绕绳自由端,手拉绳的功率P和密闭容器D匀速被提升的距离关系如图24乙所示;密闭容器D上升速度0.05m/s保持不变,密闭容器D被提出水后,圆柱体B从密闭容器D中取出放在浮体C的上面,同时手松开绳子时,浮体C露出水面的体积减少总体积的;在提升全过程中,配重A始终没有离开地面。两个定滑轮总重10
N.(绳的重力,滑轮与轴的摩擦及水的阻力不计。g=10N/kg),求:(7分)
(1)圆柱体B的重力;
(2)密闭容器D离开水面时,滑轮组提升重物B的机械效率;(百分号前面保留整数);
(3)圆柱体B的密度;
(4)在提升全过程中配重A对地面的压强的最大变化量。
答案
1、【答案】
A
2、【答案】
A
3、【答案】
B
4、【答案】
C
5、【答案】
先变小后变大
6、【答案】
B
7、【答案】
D
8、【答案】
300?
60
9、【答案】
(1)左?(2)动力×动力臂=阻力×阻力臂?不合理?实验次数太少,不具有普遍性?(3)杠杆自重对实验有影响?(4)在C点挂4个钩码?在D点挂3个钩码??(5)对?乙?乙便于测量力臂
10、【答案】
(1)左??便于准确测量力臂?(2)3?(3)变大???在阻力与阻力臂一定时,动力臂变小,则动力变大
11、【答案】
(2)?用刻度尺测出OE的长度L1??????;
12、【答案】
答案如图下图所示
13、【答案】
14、【答案】
59N,向左
15、【答案】
右?
0.75??大
16、【答案】
(1)80%;(2)70000Pa;(3)13050N;(4)1800W.
17、【答案】
(1)60N(2)?(3)
7500pa
18、【答案】
(1)托盘上没放物时F="0"
N,从图17-乙可知
R="450"
Ω-----------1分
(2)S=
F/P=400/2×106=0.0002(m2)----------------2分
(3)当传感器受到最大压力F=400N时,秤达到最大称量。
由
OB:BA="1:2?"
得OA:OB=3:1
由杠杆平衡条件得:mg×OB=
F×OA
m=
F×OA/(g×OB)=400×3/(10×1)=120(kg)-------
2分
(4)从图17-乙可知F=400N时R="50"
Ω?
UO=3V
I=IO=UO/RO=3/100=0.03(A)
P=I2R=0.032×50="0.045(w)------"
2分
19、【答案】
C
20、【答案】
(1)200N(2)83%(3)(4)
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿