上海市2011-2020年高考物理试卷专项分类汇编之12—力学实验(含答案及解析)
文档属性
| 名称 | 上海市2011-2020年高考物理试卷专项分类汇编之12—力学实验(含答案及解析) |
|
|
| 格式 | rar | ||
| 文件大小 | 414.5KB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 沪科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-01-13 00:00:00 | ||
图片预览
文档简介
中小学教育资源及组卷应用平台
上海市2011-2020年高考试卷分类汇编之12—
力学实验
(1)测定物体的加速度
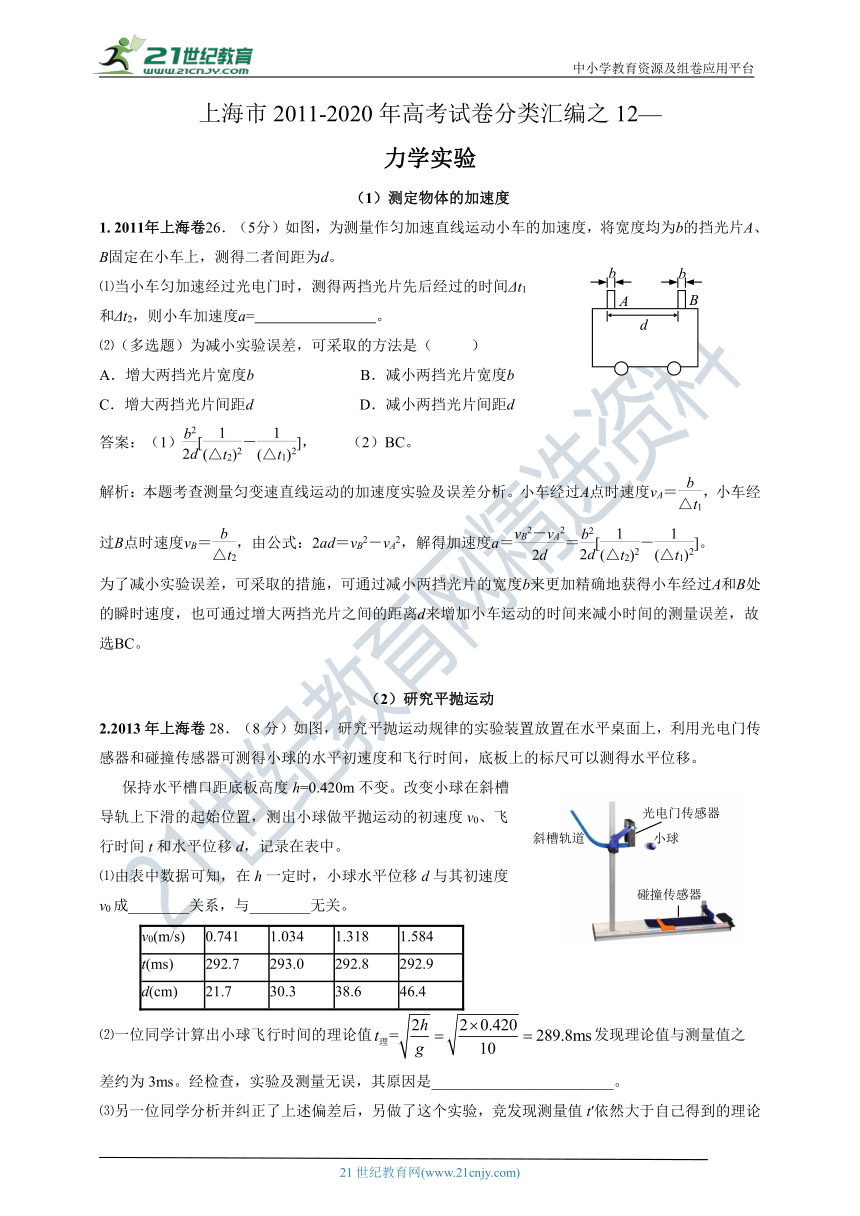
1. 2011年上海卷26.(5分)如图,为测量作匀加速直线运动小车的加速度,将宽度均为b的挡光片A、B固定在小车上,测得二者间距为d。
⑴当小车匀加速经过光电门时,测得两挡光片先后经过的时间Δt1和Δt2,则小车加速度a= 。
⑵(多选题)为减小实验误差,可采取的方法是( )
A.增大两挡光片宽度b B.减小两挡光片宽度b
C.增大两挡光片间距d D.减小两挡光片间距d
答案:(1)[-], (2)BC。
解析:本题考查测量匀变速直线运动的加速度实验及误差分析。小车经过A点时速度vA=,小车经过B点时速度vB=,由公式:2ad=vB2-vA2,解得加速度a==[-]。
为了减小实验误差,可采取的措施,可通过减小两挡光片的宽度b来更加精确地获得小车经过A和B处的瞬时速度,也可通过增大两挡光片之间的距离d来增加小车运动的时间来减小时间的测量误差,故选BC。
(2)研究平抛运动
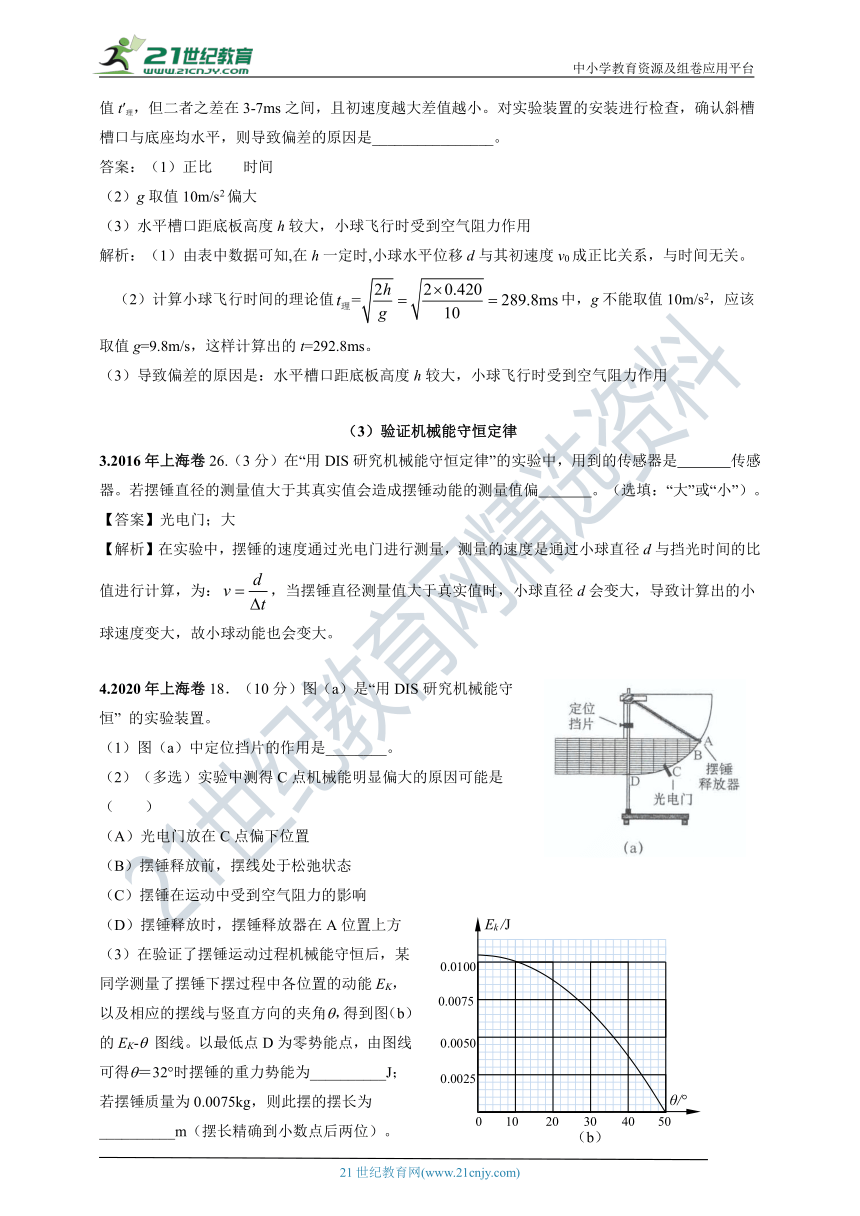
2.2013年上海卷28.(8分)如图,研究平抛运动规律的实验装置放置在水平桌面上,利用光电门传感器和碰撞传感器可测得小球的水平初速度和飞行时间,底板上的标尺可以测得水平位移。
保持水平槽口距底板高度h=0.420m不变。改变小球在斜槽导轨上下滑的起始位置,测出小球做平抛运动的初速度v0、飞行时间t和水平位移d,记录在表中。
⑴由表中数据可知,在h一定时,小球水平位移d与其初速度v0成________关系,与________无关。
v0(m/s) 0.741 1.034 1.318 1.584
t(ms) 292.7 293.0 292.8 292.9
d(cm) 21.7 30.3 38.6 46.4
⑵一位同学计算出小球飞行时间的理论值发现理论值与测量值之差约为3ms。经检查,实验及测量无误,其原因是________________________。
⑶另一位同学分析并纠正了上述偏差后,另做了这个实验,竞发现测量值t′依然大于自己得到的理论值t′理,但二者之差在3-7ms之间,且初速度越大差值越小。对实验装置的安装进行检查,确认斜槽槽口与底座均水平,则导致偏差的原因是________________。
答案:(1)正比 时间
(2)g取值10m/s2偏大
(3)水平槽口距底板高度h较大,小球飞行时受到空气阻力作用
解析:(1)由表中数据可知,在h一定时,小球水平位移d与其初速度v0成正比关系,与时间无关。
(2)计算小球飞行时间的理论值中,g不能取值10m/s2,应该取值g=9.8m/s,这样计算出的t=292.8ms。
(3)导致偏差的原因是:水平槽口距底板高度h较大,小球飞行时受到空气阻力作用
(3)验证机械能守恒定律
3.2016年上海卷26.(3分)在“用DIS研究机械能守恒定律”的实验中,用到的传感器是 传感器。若摆锤直径的测量值大于其真实值会造成摆锤动能的测量值偏 。(选填:“大”或“小”)。
【答案】光电门;大
【解析】在实验中,摆锤的速度通过光电门进行测量,测量的速度是通过小球直径d与挡光时间的比值进行计算,为:,当摆锤直径测量值大于真实值时,小球直径d会变大,导致计算出的小球速度变大,故小球动能也会变大。
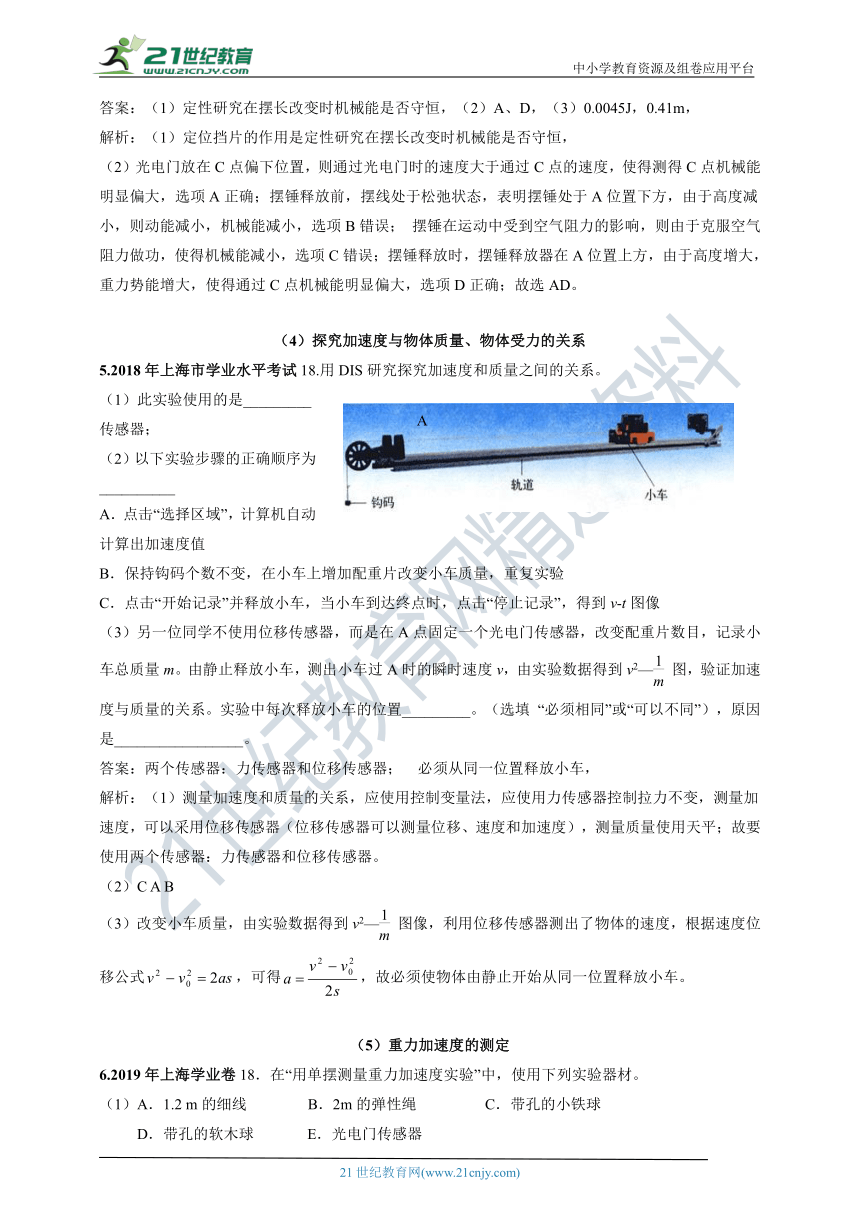
4.2020年上海卷18.(10分)图(a)是“用DIS研究机械能守恒” 的实验装置。
(1)图(a)中定位挡片的作用是________。
(2)(多选)实验中测得C点机械能明显偏大的原因可能是( )
(A)光电门放在C点偏下位置
(B)摆锤释放前,摆线处于松弛状态
(C)摆锤在运动中受到空气阻力的影响
(D)摆锤释放时,摆锤释放器在A位置上方
(3)在验证了摆锤运动过程机械能守恒后,某同学测量了摆锤下摆过程中各位置的动能EK,以及相应的摆线与竖直方向的夹角,得到图(b)的EK- 图线。以最低点D为零势能点,由图线可得=32时摆锤的重力势能为__________J;若摆锤质量为0.0075kg,则此摆的摆长为__________m(摆长精确到小数点后两位)。
答案:(1)定性研究在摆长改变时机械能是否守恒,(2)A、D,(3)0.0045J,0.41m,
解析:(1)定位挡片的作用是定性研究在摆长改变时机械能是否守恒,
(2)光电门放在C点偏下位置,则通过光电门时的速度大于通过C点的速度,使得测得C点机械能明显偏大,选项A正确;摆锤释放前,摆线处于松弛状态,表明摆锤处于A位置下方,由于高度减小,则动能减小,机械能减小,选项B错误; 摆锤在运动中受到空气阻力的影响,则由于克服空气阻力做功,使得机械能减小,选项C错误;摆锤释放时,摆锤释放器在A位置上方,由于高度增大,重力势能增大,使得通过C点机械能明显偏大,选项D正确;故选AD。
(4)探究加速度与物体质量、物体受力的关系
5.2018年上海市学业水平考试18.用DIS研究探究加速度和质量之间的关系。
(1)此实验使用的是_________传感器;
(2)以下实验步骤的正确顺序为__________
A.点击“选择区域”,计算机自动计算出加速度值
B.保持钩码个数不变,在小车上增加配重片改变小车质量,重复实验
C.点击“开始记录”并释放小车,当小车到达终点时,点击“停止记录”,得到v-t图像
(3)另一位同学不使用位移传感器,而是在A点固定一个光电门传感器,改变配重片数目,记录小车总质量m。由静止释放小车,测出小车过A时的瞬时速度v,由实验数据得到v2—图,验证加速度与质量的关系。实验中每次释放小车的位置_________。(选填 “必须相同”或“可以不同”),原因是_________________。
答案:两个传感器:力传感器和位移传感器; 必须从同一位置释放小车,
解析:(1)测量加速度和质量的关系,应使用控制变量法,应使用力传感器控制拉力不变,测量加速度,可以采用位移传感器(位移传感器可以测量位移、速度和加速度),测量质量使用天平;故要使用两个传感器:力传感器和位移传感器。
(2)C A B
(3)改变小车质量,由实验数据得到v2—图像,利用位移传感器测出了物体的速度,根据速度位移公式,可得,故必须使物体由静止开始从同一位置释放小车。
(5)重力加速度的测定
6.2019年上海学业卷18.在“用单摆测量重力加速度实验”中,使用下列实验器材。
(1)A.1.2 m的细线 B.2m的弹性绳 C.带孔的小铁球
D.带孔的软木球 E.光电门传感器
应选用哪种绳________,应选用哪种球__________, 光电门的摆放位置为(选填“最高点”或“最低点”)
(2)右图为光电门传感器电流强度I与t的图像,则周期为( )
A.t1 B.t2一t1 C.t3一t1 D. t4一t1
(3)甲同学用秒表做该实验,但所得周期比该实验得到的大,则可能的原因是_____________________________。
答案:?(1))A;? C; 最低点????? (2)C??
(3)开始计时时,秒表太早按下,测量时间偏长,周期偏大
解析:(1))用单摆测量重力加速度的实验中,应使用不可伸长的细线,故选A;摆球应选密度大的小球,以减小空气阻力的影响,故选C;光电门的摆放位置应为最低点,摆球通过平衡位置时的速度最大,测量周期的误差小。
(2)摆球往返一次的时间为周期,因此有两次通过平衡位置,故选C。
(3)甲同学在开始计时时,秒表过早按下,测量的时间偏长,使得周期偏大。
7. 2012年物理上海卷29.(8分)在“利用单摆测重力加速度”的实验中。
(1)某同学尝试用DIS测量周期。如图,用一个磁性小球代替原先的摆球,在单摆下方放置一个磁传感器,其轴线恰好位于单摆悬挂点正下方。图中磁传感器的引出端A应接到____________。使单摆做小角度摆动,当磁感应强度测量值最大时,磁性小球位于____________。若测得连续N个磁感应强度最大值之间的时间间隔为t,则单摆周期的测量值为____________(地磁场和磁传感器的影响可忽略)。
(2)多次改变摆长使单摆做小角度摆动,测量摆长L及相应的周期T。此后,分别取L和T的对数,所得到的lgT-lgL图线为____________(填:“直线”、“对数曲线”或“指数曲线”);读得图线与纵轴交点的纵坐标为c,由此得到该地重力加速度g=____________。
答案:(1)数据采集器,最低点(或平衡位置), , (2)直线,
解析:(1)只有小球在最低点时,磁感应器中的磁感强度才最大;连续N个磁感应强度最大值应有N-1个时间间隔,这段时间应为(N-1)/2个周期,即:因此
(2)根据:,取对数得:因此图象为一条直线;图象与纵坐标交点为C,则 整理得:
8. 2014年物理上海卷29. (8分)某小组在做“用单摆测定重力加速度”实验后,为进一步探究,将单摆的轻质细线改为刚性重杆。通过查资料得知,这样做成的“复摆”做简谐运动的周期,式中Ic为由该摆决定的常量,m为摆的质量,g为重力加速度,r为转轴到重心C的距离。如图(a),实验时在杆上不同位置打上多个小孔,将其中一个小孔穿在光滑水平轴O上,使杆做简谐运动,测量并记录r和相应的运动周期T,然后将不同位置的孔穿在轴上重复实验,实验数据见表,并测得摆的质量m=0.50kg
r/m 0.45 0.40 0.35 0.30 0.25 0.20
T/s 2.11 2.14 2.20 2.30 2.43 2.64
(1)由实验数据得出图(b)所示的拟合直线,图中纵轴表示 .
(2) Ic的国际单位为 ,由拟合直线得到Ic的值为 (保留到小数点后二位);
(3)若摆的质量测量值偏大,重力加速度g的测量值 。(选填:“偏大”、“偏小”或“不变")
【答案】(1)T2r (2) kg·m2; 0.17 (3)不变
【解析】(1)根据复摆的周期公式: ,得,题图中纵坐标表示T2r;(2)根据关系式,利用单位关系可知Ic的国际单位为kg·m2;根据图线的截距得,解得Ic=0.17。(3)本实验数据处理是通过图线的斜率分析出的,与质量无关,所以质量变化后,重力加速度的测量值不变。
(6)其它力学实验
9.2019年上海学业卷13.在太空中测宇航员质量,测量仪器提供拉力、并测出宇航员的________, 根据______得出宇航员的质量。
答案:加速度,牛顿第二定律
解析:在太空中,万有引力提供向心力,宇航员及其中的物品均处于失重状态。根据F=ma,测量仪器提供拉力的值,再测量出加速度,可以根据牛顿第二定律来测量质量。
10.2015年上海卷28.(8分)改进后的“研究有固定转动轴物体平衡条件”的实验装置如图所示,力传感器、定滑轮固定在横杆上,替代原装置中的弹簧秤。已知力矩盘上各同心圆的间距均为5cm。
(1)(多选题)做这样改进的优点是
(A)力传感器既可测拉力又可测压力
(B)力传感器测力时不受主观判断影响,精度较高
(C)能消除转轴摩擦引起的实验误差
(D)保证力传感器所受拉力方向不变
(2)某同学用该装置做实验,检验时发现盘停止转动时G点始终在最低处,他仍用该盘做实验。在对力传感器进行调零后,用力传感器将力矩盘的G点拉到图示位置,此时力传感器读数为3N。再对力传感器进行调零,然后悬挂钩码进行实验。此方法________(选填“能”、“不能”)消除力矩盘偏心引起的实验误差。已知每个钩码所受重力为1N,力矩盘按图示方式悬挂钩码后,力矩盘所受顺时针方向的合力矩为_______N·m。力传感器的读数为_______N。
答案:(1)BD (2)能, 0.7、 -0.5
解析:(1)力传感器、定滑轮固定在横杆上,替代原装置中的弹簧秤,主要好处是:力传感器测力时不受主观判断影响,精确度高和保证力传感器所受拉力方向不变,所以B、D正确。弹簧秤也可以测拉力和压力的,所以A错误;不能消除转轴摩擦引起的实验误差,故C错误。
(2)某同学用该装置做实验,检验时发现盘停止转动时,G点始终在最低处,他仍用该盘做实验。在对力传感器进行调零后,用力传感器将力矩盘的G点拉到图示位置,此时力传感器读数为3N,说明此时偏心的顺时针力矩为M0=3×2×0.05 N?m =0.3N?m,再对力矩盘进行调零,这时就可以消除力矩盘偏心引起的实验误差;
力矩盘所受顺时针方向的合力矩M1=(2×1×0.05+0.3) N?m =0.7N?m,
根据有固定转动轴物体的平衡条件:F×2×0.05+3×1×3×0.05+0.3= 2×1×0.05+2×1×3×0.05+0.3,
解得F= -0.5N
_21?????????è?????(www.21cnjy.com)_
上海市2011-2020年高考试卷分类汇编之12—
力学实验
(1)测定物体的加速度
1. 2011年上海卷26.(5分)如图,为测量作匀加速直线运动小车的加速度,将宽度均为b的挡光片A、B固定在小车上,测得二者间距为d。
⑴当小车匀加速经过光电门时,测得两挡光片先后经过的时间Δt1和Δt2,则小车加速度a= 。
⑵(多选题)为减小实验误差,可采取的方法是( )
A.增大两挡光片宽度b B.减小两挡光片宽度b
C.增大两挡光片间距d D.减小两挡光片间距d
答案:(1)[-], (2)BC。
解析:本题考查测量匀变速直线运动的加速度实验及误差分析。小车经过A点时速度vA=,小车经过B点时速度vB=,由公式:2ad=vB2-vA2,解得加速度a==[-]。
为了减小实验误差,可采取的措施,可通过减小两挡光片的宽度b来更加精确地获得小车经过A和B处的瞬时速度,也可通过增大两挡光片之间的距离d来增加小车运动的时间来减小时间的测量误差,故选BC。
(2)研究平抛运动
2.2013年上海卷28.(8分)如图,研究平抛运动规律的实验装置放置在水平桌面上,利用光电门传感器和碰撞传感器可测得小球的水平初速度和飞行时间,底板上的标尺可以测得水平位移。
保持水平槽口距底板高度h=0.420m不变。改变小球在斜槽导轨上下滑的起始位置,测出小球做平抛运动的初速度v0、飞行时间t和水平位移d,记录在表中。
⑴由表中数据可知,在h一定时,小球水平位移d与其初速度v0成________关系,与________无关。
v0(m/s) 0.741 1.034 1.318 1.584
t(ms) 292.7 293.0 292.8 292.9
d(cm) 21.7 30.3 38.6 46.4
⑵一位同学计算出小球飞行时间的理论值发现理论值与测量值之差约为3ms。经检查,实验及测量无误,其原因是________________________。
⑶另一位同学分析并纠正了上述偏差后,另做了这个实验,竞发现测量值t′依然大于自己得到的理论值t′理,但二者之差在3-7ms之间,且初速度越大差值越小。对实验装置的安装进行检查,确认斜槽槽口与底座均水平,则导致偏差的原因是________________。
答案:(1)正比 时间
(2)g取值10m/s2偏大
(3)水平槽口距底板高度h较大,小球飞行时受到空气阻力作用
解析:(1)由表中数据可知,在h一定时,小球水平位移d与其初速度v0成正比关系,与时间无关。
(2)计算小球飞行时间的理论值中,g不能取值10m/s2,应该取值g=9.8m/s,这样计算出的t=292.8ms。
(3)导致偏差的原因是:水平槽口距底板高度h较大,小球飞行时受到空气阻力作用
(3)验证机械能守恒定律
3.2016年上海卷26.(3分)在“用DIS研究机械能守恒定律”的实验中,用到的传感器是 传感器。若摆锤直径的测量值大于其真实值会造成摆锤动能的测量值偏 。(选填:“大”或“小”)。
【答案】光电门;大
【解析】在实验中,摆锤的速度通过光电门进行测量,测量的速度是通过小球直径d与挡光时间的比值进行计算,为:,当摆锤直径测量值大于真实值时,小球直径d会变大,导致计算出的小球速度变大,故小球动能也会变大。
4.2020年上海卷18.(10分)图(a)是“用DIS研究机械能守恒” 的实验装置。
(1)图(a)中定位挡片的作用是________。
(2)(多选)实验中测得C点机械能明显偏大的原因可能是( )
(A)光电门放在C点偏下位置
(B)摆锤释放前,摆线处于松弛状态
(C)摆锤在运动中受到空气阻力的影响
(D)摆锤释放时,摆锤释放器在A位置上方
(3)在验证了摆锤运动过程机械能守恒后,某同学测量了摆锤下摆过程中各位置的动能EK,以及相应的摆线与竖直方向的夹角,得到图(b)的EK- 图线。以最低点D为零势能点,由图线可得=32时摆锤的重力势能为__________J;若摆锤质量为0.0075kg,则此摆的摆长为__________m(摆长精确到小数点后两位)。
答案:(1)定性研究在摆长改变时机械能是否守恒,(2)A、D,(3)0.0045J,0.41m,
解析:(1)定位挡片的作用是定性研究在摆长改变时机械能是否守恒,
(2)光电门放在C点偏下位置,则通过光电门时的速度大于通过C点的速度,使得测得C点机械能明显偏大,选项A正确;摆锤释放前,摆线处于松弛状态,表明摆锤处于A位置下方,由于高度减小,则动能减小,机械能减小,选项B错误; 摆锤在运动中受到空气阻力的影响,则由于克服空气阻力做功,使得机械能减小,选项C错误;摆锤释放时,摆锤释放器在A位置上方,由于高度增大,重力势能增大,使得通过C点机械能明显偏大,选项D正确;故选AD。
(4)探究加速度与物体质量、物体受力的关系
5.2018年上海市学业水平考试18.用DIS研究探究加速度和质量之间的关系。
(1)此实验使用的是_________传感器;
(2)以下实验步骤的正确顺序为__________
A.点击“选择区域”,计算机自动计算出加速度值
B.保持钩码个数不变,在小车上增加配重片改变小车质量,重复实验
C.点击“开始记录”并释放小车,当小车到达终点时,点击“停止记录”,得到v-t图像
(3)另一位同学不使用位移传感器,而是在A点固定一个光电门传感器,改变配重片数目,记录小车总质量m。由静止释放小车,测出小车过A时的瞬时速度v,由实验数据得到v2—图,验证加速度与质量的关系。实验中每次释放小车的位置_________。(选填 “必须相同”或“可以不同”),原因是_________________。
答案:两个传感器:力传感器和位移传感器; 必须从同一位置释放小车,
解析:(1)测量加速度和质量的关系,应使用控制变量法,应使用力传感器控制拉力不变,测量加速度,可以采用位移传感器(位移传感器可以测量位移、速度和加速度),测量质量使用天平;故要使用两个传感器:力传感器和位移传感器。
(2)C A B
(3)改变小车质量,由实验数据得到v2—图像,利用位移传感器测出了物体的速度,根据速度位移公式,可得,故必须使物体由静止开始从同一位置释放小车。
(5)重力加速度的测定
6.2019年上海学业卷18.在“用单摆测量重力加速度实验”中,使用下列实验器材。
(1)A.1.2 m的细线 B.2m的弹性绳 C.带孔的小铁球
D.带孔的软木球 E.光电门传感器
应选用哪种绳________,应选用哪种球__________, 光电门的摆放位置为(选填“最高点”或“最低点”)
(2)右图为光电门传感器电流强度I与t的图像,则周期为( )
A.t1 B.t2一t1 C.t3一t1 D. t4一t1
(3)甲同学用秒表做该实验,但所得周期比该实验得到的大,则可能的原因是_____________________________。
答案:?(1))A;? C; 最低点????? (2)C??
(3)开始计时时,秒表太早按下,测量时间偏长,周期偏大
解析:(1))用单摆测量重力加速度的实验中,应使用不可伸长的细线,故选A;摆球应选密度大的小球,以减小空气阻力的影响,故选C;光电门的摆放位置应为最低点,摆球通过平衡位置时的速度最大,测量周期的误差小。
(2)摆球往返一次的时间为周期,因此有两次通过平衡位置,故选C。
(3)甲同学在开始计时时,秒表过早按下,测量的时间偏长,使得周期偏大。
7. 2012年物理上海卷29.(8分)在“利用单摆测重力加速度”的实验中。
(1)某同学尝试用DIS测量周期。如图,用一个磁性小球代替原先的摆球,在单摆下方放置一个磁传感器,其轴线恰好位于单摆悬挂点正下方。图中磁传感器的引出端A应接到____________。使单摆做小角度摆动,当磁感应强度测量值最大时,磁性小球位于____________。若测得连续N个磁感应强度最大值之间的时间间隔为t,则单摆周期的测量值为____________(地磁场和磁传感器的影响可忽略)。
(2)多次改变摆长使单摆做小角度摆动,测量摆长L及相应的周期T。此后,分别取L和T的对数,所得到的lgT-lgL图线为____________(填:“直线”、“对数曲线”或“指数曲线”);读得图线与纵轴交点的纵坐标为c,由此得到该地重力加速度g=____________。
答案:(1)数据采集器,最低点(或平衡位置), , (2)直线,
解析:(1)只有小球在最低点时,磁感应器中的磁感强度才最大;连续N个磁感应强度最大值应有N-1个时间间隔,这段时间应为(N-1)/2个周期,即:因此
(2)根据:,取对数得:因此图象为一条直线;图象与纵坐标交点为C,则 整理得:
8. 2014年物理上海卷29. (8分)某小组在做“用单摆测定重力加速度”实验后,为进一步探究,将单摆的轻质细线改为刚性重杆。通过查资料得知,这样做成的“复摆”做简谐运动的周期,式中Ic为由该摆决定的常量,m为摆的质量,g为重力加速度,r为转轴到重心C的距离。如图(a),实验时在杆上不同位置打上多个小孔,将其中一个小孔穿在光滑水平轴O上,使杆做简谐运动,测量并记录r和相应的运动周期T,然后将不同位置的孔穿在轴上重复实验,实验数据见表,并测得摆的质量m=0.50kg
r/m 0.45 0.40 0.35 0.30 0.25 0.20
T/s 2.11 2.14 2.20 2.30 2.43 2.64
(1)由实验数据得出图(b)所示的拟合直线,图中纵轴表示 .
(2) Ic的国际单位为 ,由拟合直线得到Ic的值为 (保留到小数点后二位);
(3)若摆的质量测量值偏大,重力加速度g的测量值 。(选填:“偏大”、“偏小”或“不变")
【答案】(1)T2r (2) kg·m2; 0.17 (3)不变
【解析】(1)根据复摆的周期公式: ,得,题图中纵坐标表示T2r;(2)根据关系式,利用单位关系可知Ic的国际单位为kg·m2;根据图线的截距得,解得Ic=0.17。(3)本实验数据处理是通过图线的斜率分析出的,与质量无关,所以质量变化后,重力加速度的测量值不变。
(6)其它力学实验
9.2019年上海学业卷13.在太空中测宇航员质量,测量仪器提供拉力、并测出宇航员的________, 根据______得出宇航员的质量。
答案:加速度,牛顿第二定律
解析:在太空中,万有引力提供向心力,宇航员及其中的物品均处于失重状态。根据F=ma,测量仪器提供拉力的值,再测量出加速度,可以根据牛顿第二定律来测量质量。
10.2015年上海卷28.(8分)改进后的“研究有固定转动轴物体平衡条件”的实验装置如图所示,力传感器、定滑轮固定在横杆上,替代原装置中的弹簧秤。已知力矩盘上各同心圆的间距均为5cm。
(1)(多选题)做这样改进的优点是
(A)力传感器既可测拉力又可测压力
(B)力传感器测力时不受主观判断影响,精度较高
(C)能消除转轴摩擦引起的实验误差
(D)保证力传感器所受拉力方向不变
(2)某同学用该装置做实验,检验时发现盘停止转动时G点始终在最低处,他仍用该盘做实验。在对力传感器进行调零后,用力传感器将力矩盘的G点拉到图示位置,此时力传感器读数为3N。再对力传感器进行调零,然后悬挂钩码进行实验。此方法________(选填“能”、“不能”)消除力矩盘偏心引起的实验误差。已知每个钩码所受重力为1N,力矩盘按图示方式悬挂钩码后,力矩盘所受顺时针方向的合力矩为_______N·m。力传感器的读数为_______N。
答案:(1)BD (2)能, 0.7、 -0.5
解析:(1)力传感器、定滑轮固定在横杆上,替代原装置中的弹簧秤,主要好处是:力传感器测力时不受主观判断影响,精确度高和保证力传感器所受拉力方向不变,所以B、D正确。弹簧秤也可以测拉力和压力的,所以A错误;不能消除转轴摩擦引起的实验误差,故C错误。
(2)某同学用该装置做实验,检验时发现盘停止转动时,G点始终在最低处,他仍用该盘做实验。在对力传感器进行调零后,用力传感器将力矩盘的G点拉到图示位置,此时力传感器读数为3N,说明此时偏心的顺时针力矩为M0=3×2×0.05 N?m =0.3N?m,再对力矩盘进行调零,这时就可以消除力矩盘偏心引起的实验误差;
力矩盘所受顺时针方向的合力矩M1=(2×1×0.05+0.3) N?m =0.7N?m,
根据有固定转动轴物体的平衡条件:F×2×0.05+3×1×3×0.05+0.3= 2×1×0.05+2×1×3×0.05+0.3,
解得F= -0.5N
_21?????????è?????(www.21cnjy.com)_
同课章节目录