3.4 简单机械-杠杆 (课件 24张ppt)
文档属性
| 名称 | 3.4 简单机械-杠杆 (课件 24张ppt) |

|
|
| 格式 | ppt | ||
| 文件大小 | 701.6KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2021-01-25 00:00:00 | ||
图片预览






文档简介
什么是杠杆?
简单机械
一、杠杆
这些都应用了杠杆原理
提问:杠杆有什么共同的特征呢?
1 .
2 .
3.
固定点
绕固定点转动
硬棒
归纳结论
1. 杠杆:在力的作用下,能绕某一固定点转动的硬棒,物理学中叫杠杆。
举例
提问:在现实生活中,你还能举出哪些杠杆的实例呢?
F2阻力
L1动力臂
L2阻力臂
动力作用线
阻力作用线
O支点
杠杆绕着转动的固定点
使杠杆转动的力
阻碍杠杆转动的力
支点到动力作用线的距离
支点到阻力作用线的距离
F1动力
2. 杠杆的五要素
支点
动力
动力臂
阻力
阻力臂
杠杆绕着转动的固定点,用O表示。
使杠杆转动的力,用F1表示。
从支点到动力作用线的距离,用L1表示。
阻碍杠杆转动的力,用F2表示。
从支点到阻力作用线的距离,用L2表示。
动力和阻力使杠杆转动的方向(转动效果)相反
提问:什么是力臂?
2 杠杆是否都是直的?
回答:力臂是支点到力的作用线的垂直距离。
思考讨论:
1 力臂是一定在杠杆上吗?
3 若一力作用在杠杆上,作用点不变,但作用方向改变,力臂是否改变?
答:不是
答:杠杆可以是直的,也可以是弯的
答:要改变
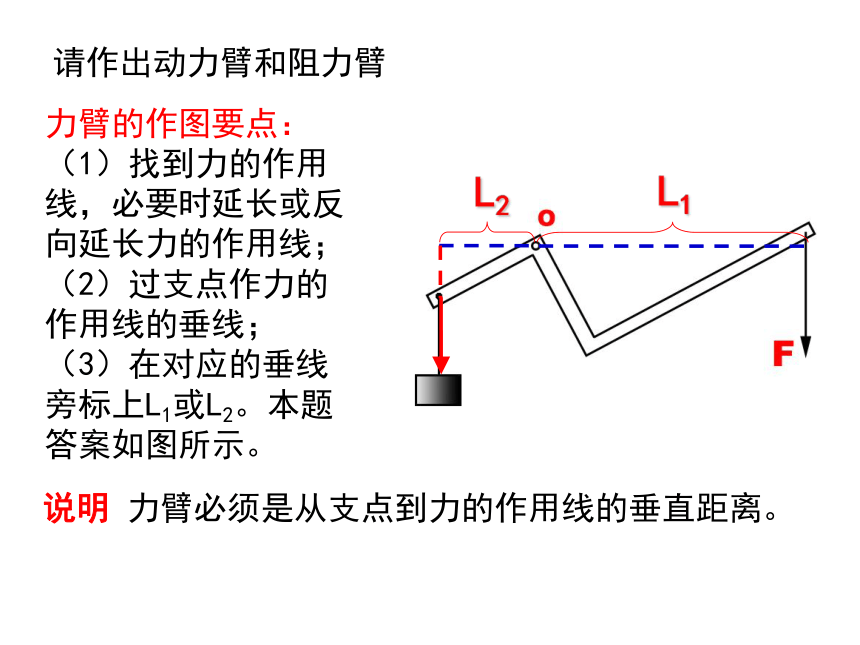
请作出动力臂和阻力臂
L1
L2
力臂的作图要点:(1)找到力的作用线,必要时延长或反向延长力的作用线;(2)过支点作力的作用线的垂线;
(3)在对应的垂线旁标上L1或L2。本题答案如图所示。
说明 力臂必须是从支点到力的作用线的垂直距离。
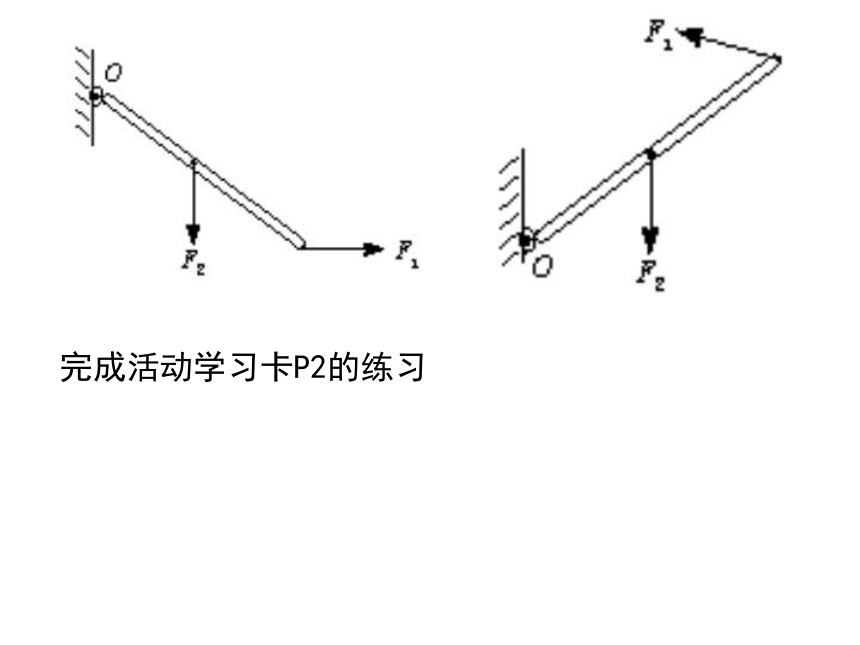
完成活动学习卡P2的练习
如图所示,杠杆OA在力F1、F2的作用下处于静止状态,l2是F2的力臂,在图中画出力F2。
F2
力的作图要点是
(1)找到力臂的一端,做垂线;
(2)垂线与杠杆的交点为力的作用点;
(3)根据支点和2个力作用点的位置关系,画出力的方向。
F1
F2
L1
L2
O
画出各力和力臂
O
F2
F1
L1
L2
画出下图杠杆的支点、动力、阻力、动力臂、阻力臂
O
F2
F1
阻力和动力的方向和支点的关系
画出下图杠杆的支点、动力、阻力、动力臂、阻力臂
F1
F2
L1
L2
O
F1
F2
L1
L2
O
如图所示的杠杆中,动力的力臂用L表示,图中所画力臂正确的是( )
D
图中,杠杆有可能平衡的是( )
D
在图6中,O为支点,力臂最长的力是 ( )
A.F1 B.F2
C.F3 D.F4
C
1. 杠杆平衡:
二、杠杆的平衡条件
2. 设计实验:
(1)器材:
杠杆保持静止或匀速转动
带刻度的杠杆,线,支架,钩码,弹簧测力计。
(2)步骤:
a. 把杠杆安装在支架上,调节两端的平衡螺母,使杠杆在水平位置平衡。
b. 在杠杆两边挂钩码,把支点右边的钩码对杠杆的作用力当作动力,支点左边的钩码对杠杆的作用力当作阻力。改变钩码的位置,使杠杆在水平位置平衡,记下动力F1、阻力F2、动力臂L1、阻力臂L2的数值。
次数
F1 (N)
L1
(Cm)
F1 ?L1
F2 (N)
L2
(Cm)
F2 ?L2
1
2
3
完成活动学习卡P3的表格
杠杆平衡的条件
当杠杆平衡时:
F1×L1=F2×L2
或
F1
L1
F2
L2
=
上式表明:动力臂L1是阻力臂L2的几倍,动力F1就是阻力F2的几分之一。
实验题训练:
研究杠杆平衡条件的实验装置如图所示,在未挂钩码时,平衡螺母的作用是__________________________,挂上钩码后,发现杠杆不平衡,则应________________
______________________________________________。
使杠杆在水平位置平衡
移动钩码的位置(或改变钩码的个数)使杠杆在水平位置平衡
某同学在做“研究杠杆平衡条件”的实验中,进行以下操作:
(1)调节杠杆两边的螺母,使杠杆平衡。
(2)在杠杆支点的两边挂上数目不等的钩码,通过移动悬挂钩码的细绳位置,并调节杠杆两边的螺母,使杠杆重新平衡,记录有关数据。
请指出该同学在上述两步操作中存在的问题。
(1)_____________________________________.
(2)_________________________________________.
应使杠杆在水平位置平衡.
(这样才可以在杠杆上直接读取力臂的长度.)
加挂钩码后就不能再去调节螺母,只能通过移动钩码的位置或加减钩码来达到新的平衡.
某同学在已经调节水平平衡的杠杆的一边挂上钩码,设钩码对杠杆的拉力为F1,在同一侧用已调整好的弹簧测力计,测得使杠杆平衡的力F2,得到如下数据。
实验次数
F1(N)
L1(cm)
F2(N)
L2(cm)
1
6
10
5
20
2
4
10
6
10
如果该同学在实验时读数和记录都正确,但操作有错误,试分析产生以上错误的原因:
_______________________________________________ ______________________________________.
F2的作用方向不在竖直位置上,使力臂L2的长度不应在
杠杆上直接读取.
在“研究杠杆平衡条件”的实验中:
(1)所用的器材有弹簧测力计,支架,线,_______和______________.
(2)实验前,先要调节杠杆两端的________.使杠杆在___________.强调这一平衡位置的目的是__________________________________.
(3)如图所示的杠杆已处于平衡状态,若左端所挂重物的重力是1N,则弹簧测力计的示数______2N,因为弹簧测力计拉力的力臂______OA的长度(均填“大于”、“小于”或“等于”).如果要在杠杆上直接可以读出力臂值来计算,那么弹簧测力计应沿_________方向拉着杠杆.
(4)该实验得到的结论是:
____________________________________
钩码
带刻度的杠杆
平衡螺母
水平平衡
便于直接在杠杆上读出力臂的值
大于
小于
竖直向上
杠杆平衡时:动力?动力臂=阻力?阻力臂
学校组织同学们到农村参加社会实践活动,小强第一次学习挑担子,他做了以下两次试验,请你根据各小题后的要求作答。
(1)他先在1.2m扁担的两端各挂上50N的重物,担子很快就被平稳地挑起来。这时他的肩膀应放在扁担的什么位置(只要回答,不要分析)?
(2)接着,他又在扁担的A端加上50N的重物,但他掌握不好担子的平衡。请你用杠杆平衡知识,帮助他计算出肩膀应距B端多远,担子才能重新水平平衡?(扁担质量忽略不计)
如图所示为使杠杆平衡,F1、F2、F3 三次分别作用在A点,其中______最小。
F2
希腊科学家阿基米德发现杠杆原理后,发出了“给我支点,我可以撬动地球”的豪言壮语。假如阿基米德在杠杆的一端施加600N的力,要搬动质量为6.0×1024kg的地球,那么长臂的长应是短臂长的多少倍?如果要把地球撬起1cm,长臂的一端要按下多长距离?假如我们以光速向下按,要按多少年?(做完该题,你有何启示?)
简单机械
一、杠杆
这些都应用了杠杆原理
提问:杠杆有什么共同的特征呢?
1 .
2 .
3.
固定点
绕固定点转动
硬棒
归纳结论
1. 杠杆:在力的作用下,能绕某一固定点转动的硬棒,物理学中叫杠杆。
举例
提问:在现实生活中,你还能举出哪些杠杆的实例呢?
F2阻力
L1动力臂
L2阻力臂
动力作用线
阻力作用线
O支点
杠杆绕着转动的固定点
使杠杆转动的力
阻碍杠杆转动的力
支点到动力作用线的距离
支点到阻力作用线的距离
F1动力
2. 杠杆的五要素
支点
动力
动力臂
阻力
阻力臂
杠杆绕着转动的固定点,用O表示。
使杠杆转动的力,用F1表示。
从支点到动力作用线的距离,用L1表示。
阻碍杠杆转动的力,用F2表示。
从支点到阻力作用线的距离,用L2表示。
动力和阻力使杠杆转动的方向(转动效果)相反
提问:什么是力臂?
2 杠杆是否都是直的?
回答:力臂是支点到力的作用线的垂直距离。
思考讨论:
1 力臂是一定在杠杆上吗?
3 若一力作用在杠杆上,作用点不变,但作用方向改变,力臂是否改变?
答:不是
答:杠杆可以是直的,也可以是弯的
答:要改变
请作出动力臂和阻力臂
L1
L2
力臂的作图要点:(1)找到力的作用线,必要时延长或反向延长力的作用线;(2)过支点作力的作用线的垂线;
(3)在对应的垂线旁标上L1或L2。本题答案如图所示。
说明 力臂必须是从支点到力的作用线的垂直距离。
完成活动学习卡P2的练习
如图所示,杠杆OA在力F1、F2的作用下处于静止状态,l2是F2的力臂,在图中画出力F2。
F2
力的作图要点是
(1)找到力臂的一端,做垂线;
(2)垂线与杠杆的交点为力的作用点;
(3)根据支点和2个力作用点的位置关系,画出力的方向。
F1
F2
L1
L2
O
画出各力和力臂
O
F2
F1
L1
L2
画出下图杠杆的支点、动力、阻力、动力臂、阻力臂
O
F2
F1
阻力和动力的方向和支点的关系
画出下图杠杆的支点、动力、阻力、动力臂、阻力臂
F1
F2
L1
L2
O
F1
F2
L1
L2
O
如图所示的杠杆中,动力的力臂用L表示,图中所画力臂正确的是( )
D
图中,杠杆有可能平衡的是( )
D
在图6中,O为支点,力臂最长的力是 ( )
A.F1 B.F2
C.F3 D.F4
C
1. 杠杆平衡:
二、杠杆的平衡条件
2. 设计实验:
(1)器材:
杠杆保持静止或匀速转动
带刻度的杠杆,线,支架,钩码,弹簧测力计。
(2)步骤:
a. 把杠杆安装在支架上,调节两端的平衡螺母,使杠杆在水平位置平衡。
b. 在杠杆两边挂钩码,把支点右边的钩码对杠杆的作用力当作动力,支点左边的钩码对杠杆的作用力当作阻力。改变钩码的位置,使杠杆在水平位置平衡,记下动力F1、阻力F2、动力臂L1、阻力臂L2的数值。
次数
F1 (N)
L1
(Cm)
F1 ?L1
F2 (N)
L2
(Cm)
F2 ?L2
1
2
3
完成活动学习卡P3的表格
杠杆平衡的条件
当杠杆平衡时:
F1×L1=F2×L2
或
F1
L1
F2
L2
=
上式表明:动力臂L1是阻力臂L2的几倍,动力F1就是阻力F2的几分之一。
实验题训练:
研究杠杆平衡条件的实验装置如图所示,在未挂钩码时,平衡螺母的作用是__________________________,挂上钩码后,发现杠杆不平衡,则应________________
______________________________________________。
使杠杆在水平位置平衡
移动钩码的位置(或改变钩码的个数)使杠杆在水平位置平衡
某同学在做“研究杠杆平衡条件”的实验中,进行以下操作:
(1)调节杠杆两边的螺母,使杠杆平衡。
(2)在杠杆支点的两边挂上数目不等的钩码,通过移动悬挂钩码的细绳位置,并调节杠杆两边的螺母,使杠杆重新平衡,记录有关数据。
请指出该同学在上述两步操作中存在的问题。
(1)_____________________________________.
(2)_________________________________________.
应使杠杆在水平位置平衡.
(这样才可以在杠杆上直接读取力臂的长度.)
加挂钩码后就不能再去调节螺母,只能通过移动钩码的位置或加减钩码来达到新的平衡.
某同学在已经调节水平平衡的杠杆的一边挂上钩码,设钩码对杠杆的拉力为F1,在同一侧用已调整好的弹簧测力计,测得使杠杆平衡的力F2,得到如下数据。
实验次数
F1(N)
L1(cm)
F2(N)
L2(cm)
1
6
10
5
20
2
4
10
6
10
如果该同学在实验时读数和记录都正确,但操作有错误,试分析产生以上错误的原因:
_______________________________________________ ______________________________________.
F2的作用方向不在竖直位置上,使力臂L2的长度不应在
杠杆上直接读取.
在“研究杠杆平衡条件”的实验中:
(1)所用的器材有弹簧测力计,支架,线,_______和______________.
(2)实验前,先要调节杠杆两端的________.使杠杆在___________.强调这一平衡位置的目的是__________________________________.
(3)如图所示的杠杆已处于平衡状态,若左端所挂重物的重力是1N,则弹簧测力计的示数______2N,因为弹簧测力计拉力的力臂______OA的长度(均填“大于”、“小于”或“等于”).如果要在杠杆上直接可以读出力臂值来计算,那么弹簧测力计应沿_________方向拉着杠杆.
(4)该实验得到的结论是:
____________________________________
钩码
带刻度的杠杆
平衡螺母
水平平衡
便于直接在杠杆上读出力臂的值
大于
小于
竖直向上
杠杆平衡时:动力?动力臂=阻力?阻力臂
学校组织同学们到农村参加社会实践活动,小强第一次学习挑担子,他做了以下两次试验,请你根据各小题后的要求作答。
(1)他先在1.2m扁担的两端各挂上50N的重物,担子很快就被平稳地挑起来。这时他的肩膀应放在扁担的什么位置(只要回答,不要分析)?
(2)接着,他又在扁担的A端加上50N的重物,但他掌握不好担子的平衡。请你用杠杆平衡知识,帮助他计算出肩膀应距B端多远,担子才能重新水平平衡?(扁担质量忽略不计)
如图所示为使杠杆平衡,F1、F2、F3 三次分别作用在A点,其中______最小。
F2
希腊科学家阿基米德发现杠杆原理后,发出了“给我支点,我可以撬动地球”的豪言壮语。假如阿基米德在杠杆的一端施加600N的力,要搬动质量为6.0×1024kg的地球,那么长臂的长应是短臂长的多少倍?如果要把地球撬起1cm,长臂的一端要按下多长距离?假如我们以光速向下按,要按多少年?(做完该题,你有何启示?)
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿