沪粤版物理八下课时达标练习:6.5 探究杠杆的平衡条件第1课时 杠杆及其平衡条件(含答案)
文档属性
| 名称 | 沪粤版物理八下课时达标练习:6.5 探究杠杆的平衡条件第1课时 杠杆及其平衡条件(含答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 3.5MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪粤版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-01-28 00:00:00 | ||
图片预览


文档简介
6.5 探究杠杆的平衡条件
第1课时 杠杆及其平衡条件
题组1 杠杆及其五要素
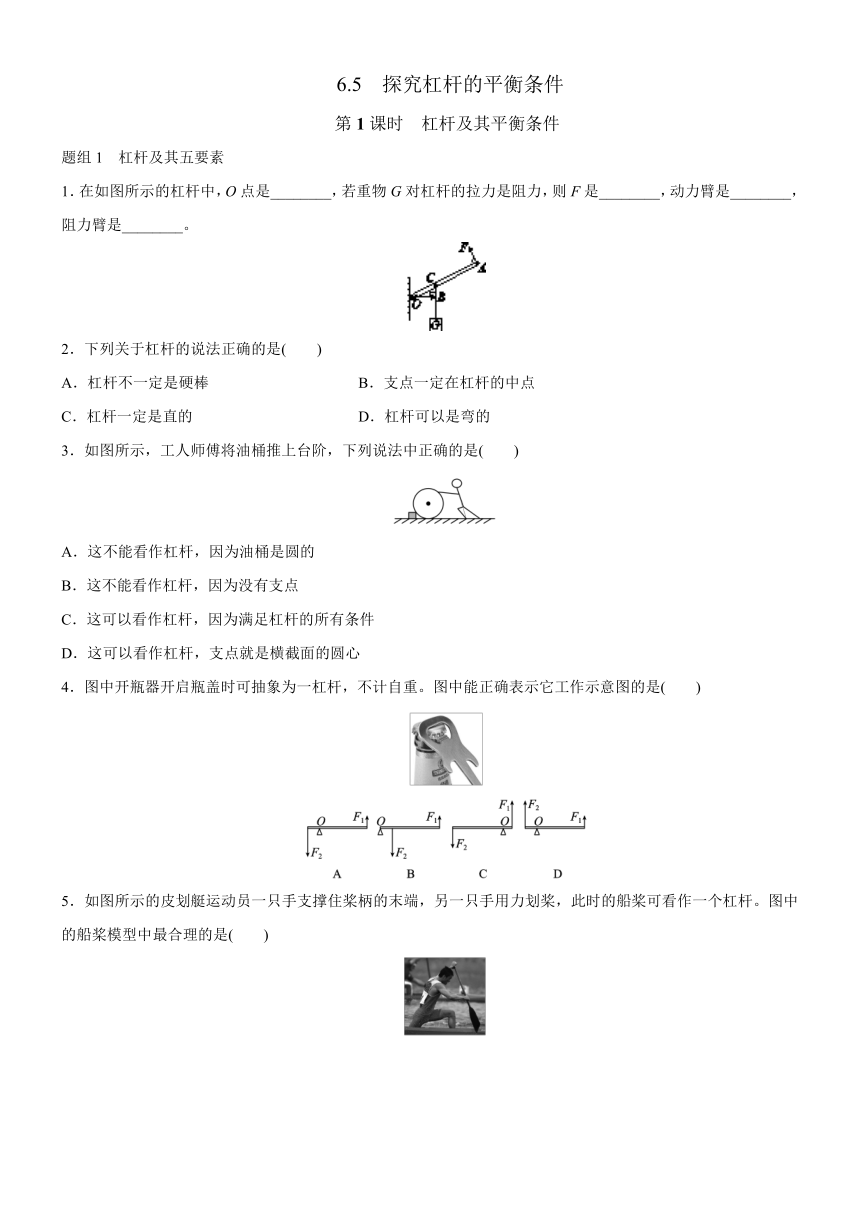
1.在如图所示的杠杆中,O点是________,若重物G对杠杆的拉力是阻力,则F是________,动力臂是________,阻力臂是________。
2.下列关于杠杆的说法正确的是( )
A.杠杆不一定是硬棒 B.支点一定在杠杆的中点
C.杠杆一定是直的 D.杠杆可以是弯的
3.如图所示,工人师傅将油桶推上台阶,下列说法中正确的是( )
A.这不能看作杠杆,因为油桶是圆的
B.这不能看作杠杆,因为没有支点
C.这可以看作杠杆,因为满足杠杆的所有条件
D.这可以看作杠杆,支点就是横截面的圆心
4.图中开瓶器开启瓶盖时可抽象为一杠杆,不计自重。图中能正确表示它工作示意图的是( )
5.如图所示的皮划艇运动员一只手支撑住桨柄的末端,另一只手用力划桨,此时的船桨可看作一个杠杆。图中的船桨模型中最合理的是( )
题组2 力臂及其画法
6.关于力臂,下列说法中正确的是( )
A.力臂一定在杠杆上 B.力臂不可能等于零
C.从支点到动力作用点的距离叫动力臂 D.从支点到力的作用线的距离叫力臂
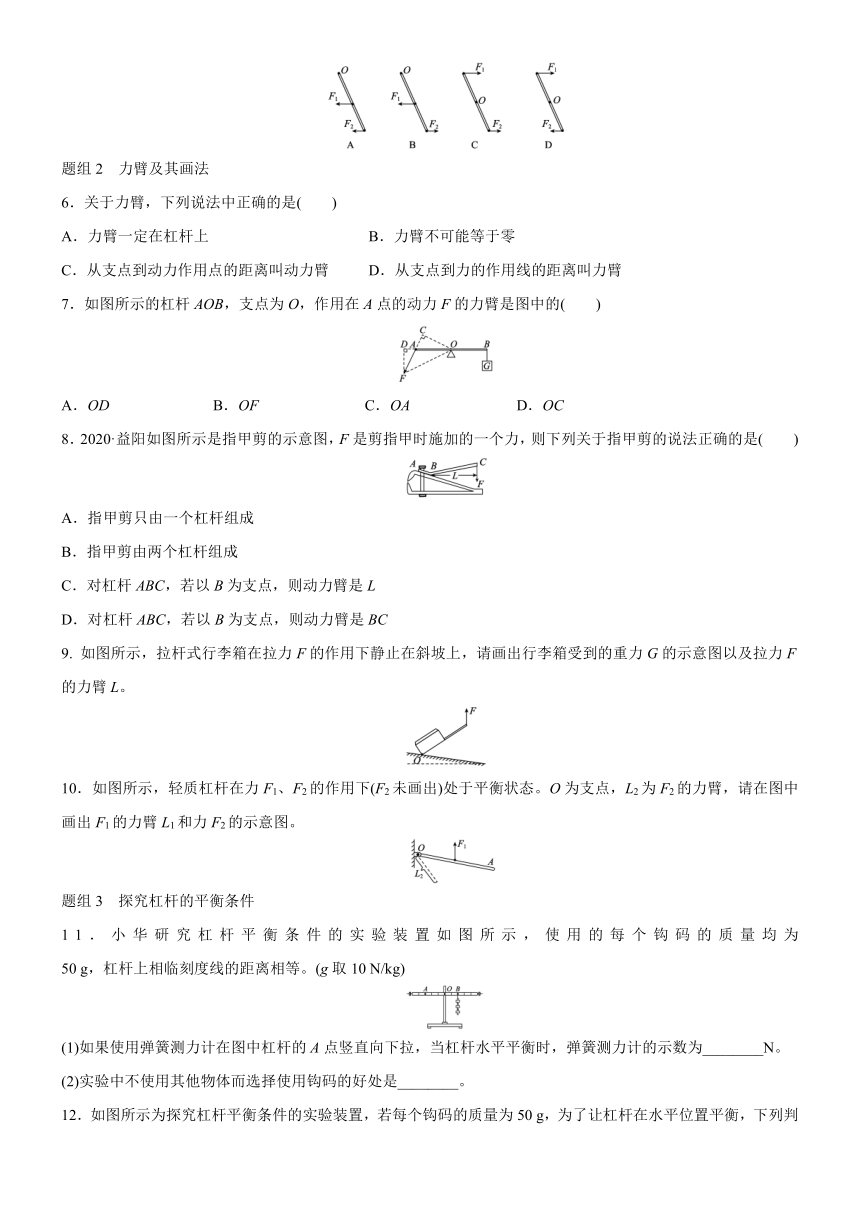
7.如图所示的杠杆AOB,支点为O,作用在A点的动力F的力臂是图中的( )
A.OD B.OF C.OA D.OC
8.2020·益阳如图所示是指甲剪的示意图,F是剪指甲时施加的一个力,则下列关于指甲剪的说法正确的是( )
A.指甲剪只由一个杠杆组成
B.指甲剪由两个杠杆组成
C.对杠杆ABC,若以B为支点,则动力臂是L
D.对杠杆ABC,若以B为支点,则动力臂是BC
9. 如图所示,拉杆式行李箱在拉力F的作用下静止在斜坡上,请画出行李箱受到的重力G的示意图以及拉力F的力臂L。
10.如图所示,轻质杠杆在力F1、F2的作用下(F2未画出)处于平衡状态。O为支点,L2为F2的力臂,请在图中画出F1的力臂L1和力F2的示意图。
题组3 探究杠杆的平衡条件
11.小华研究杠杆平衡条件的实验装置如图所示,使用的每个钩码的质量均为
50 g,杠杆上相临刻度线的距离相等。(g取10 N/kg)
(1)如果使用弹簧测力计在图中杠杆的A点竖直向下拉,当杠杆水平平衡时,弹簧测力计的示数为________N。
(2)实验中不使用其他物体而选择使用钩码的好处是________。
12.如图所示为探究杠杆平衡条件的实验装置,若每个钩码的质量为50 g,为了让杠杆在水平位置平衡,下列判断正确的是( )
A.在A点挂4个钩码能使杠杆平衡
B.在B点用弹簧测力计竖直向下拉,当示数为0.5 N时,能使杠杆平衡
C.用弹簧测力计在B点拉,无论如何改变用力方向都会省力
D.用弹簧测力计在A点拉,无论如何改变用力方向都会费力
13.小明利用刻度均匀的轻质杠杆探究“杠杆的平衡条件”实验,已知每个钩码重0.5 N。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向________(选填“左”或“右”)调节,直到杠杆在水平位置平衡。你认为实验中让杠杆在水平位置平衡的好处是_________________________________________。
(2)在图甲中的A点悬挂4个钩码,要使杠杆仍保持水平位置平衡,需在B点悬挂 ________个钩码。
(3)如图乙所示,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,仍使杠杆在水平位置平衡,弹簧测力计的拉力为 ________ N ;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然在水平位置平衡,则弹簧测力计的读数将________(选填“变大”“变小”或“不变”);若此时斜向右上方的弹簧测力计与竖直方向间的夹角为60°,杠杆在水平位置平衡时,弹簧测力计的读数为________ N。
14.小明同学做“探究杠杆的平衡条件”的实验。
(1)小明通过实验,得出了如下表所示的数据,根据数据得出杠杆的平衡条件:动力+动力臂=阻力+阻力臂,你认为他的实验过程存在什么问题?
写出两点:______________________;______________________。
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
4
5
5
4
(2)实验中,小明用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒他不要采用这种方式,主要是因为________。(填字母)
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(3)小明马上进行了改正,他不改变支点右侧所挂的两个钩码及其位置,保持左侧第________格的钩码不动,将支点左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
题组4 杠杆平衡条件的计算
15.停车场入口处常用横杆来控制车辆的进出 ,如图甲所示。我们可以把该装置简化成如图乙所示的杠杆。若横杆AB粗细相同、质量分布均匀,重力G=120 N,AB=2.8 m,AO=0.3 m。要使横杆AB保持水平平衡,需在A端施加竖直向下的力F=________N。
16.如图所示,一根粗细均匀的杠杆,等距处标注了刻度,杠杆可绕A端转动,当在B处施加15 N竖直向上的拉力F时,杠杆刚好水平平衡,则杠杆自重为________N。
17.如图所示,O为杠杆的支点,OA=40 cm,AB=10 cm,B点所挂物体重60 N,要使杠杆在水平位置平衡,则在A点至少加一个大小为________N的动力。(杠杆自重忽略不计)
18.如图所示,轻杆AB悬于O点,BO=3AO,其左端挂一质量为6 kg的物体,右端施加一个与水平方向成30°夹角的力F,此时轻杆水平平衡。请画出力F的力臂,并算出其大小为________N。(g取10 N/kg)
19.如图甲所示为前臂平伸用手掌托住铅球时的情形。我们可将图甲简化成如图乙所示的杠杆,不计杠杆自重。若铅球质量m=3 kg,OA=0.03 m,OB=0.30 m,求此时肱二头肌对前臂产生的拉力F1的大小。(g取10 N/kg)
20.如图所示是小柯制作的“杠杆力臂演示仪”,杠杆AOB可绕O点(螺母)转动,OA=0.2 m,OB=0.1 m,GM=2 N,杠杆自重和摩擦忽略不计,固定装置未画出。
(1)当杠杆处于如图甲所示的水平位置平衡时,物块N的重力GN为________N。
(2)松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB′(B′点对应B点),保持M位置不变,要使杠杆在图乙所示位置保持平衡,则应将物块N移动到________(填字母)。
A.O点处 B.①处
C.②处 D.③处
答案详析
1.支点 动力 OA OB
2.D
3.C
4.B 解析: 开瓶器开启瓶盖时可抽象为一杠杆,动力向上,且力臂比较长;而阻力向下,且力臂比较短;两个力都在支点的右侧。
5.B 解析: 由题意可知,撑住桨柄的末端为支点,下面的手给桨向后的力,这时水给桨一个向前的力,所以皮划艇前进。
6.D
7.D
8.C 解析: 由图可知,指甲剪由三个杠杆组成,故A和B均错误;力臂是支点到力的作用线的距离,而不是支点到力的作用点的距离,对杠杆ABC,若以B为支点,则动力臂是L,故C正确,D错误。
9.如图所示
10.如图所示
11.(1)1
(2)便于读取力的大小(或使力成倍改变,便于寻找规律)
解析: (1)每个钩码的重力:G=mg=50×10-3 kg×10 N/kg=0.5 N,由图可知,OB∶OA=2∶3,因为F×OA=3G×OB,所以F=3G×OBOA=3×0.5 N×23=1 N。(2)因为每个钩码的质量相等且质量已知,所以实验中使用钩码,便于读取力的大小(或使力成倍改变,便于寻找规律)。
12.D
13.(1)右 便于测量力臂
(2)2
(3)1 变大 2
解析: (1)杠杆左端下沉,应将平衡螺母向右调节;实验中让杠杆在水平位置平衡的好处是便于测量力臂。(2)在A点悬挂4个钩码,其力臂为2个格子;B点的力臂为4个格子,则要使杠杆仍保持水平位置平衡,需在B点悬挂2个钩码。(3)4个钩码重2 N,力臂为2个格子;C点的力臂为4个格子,则弹簧测力计的拉力为1 N;若改变拉力的方向,拉力的力臂减小,拉力将变大;若弹簧测力计与竖直方向间的夹角为60°,则其力臂为OC的一半,即2个格子,弹簧测力计的读数应为2 N。
14.(1)实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论 单位不同的两个物理量不能相加
(2)D (3)2
解析: (1)小明同学的结论:动力+动力臂=阻力+阻力臂,没有意义,且实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论;单位不同的两个物理量不能相加。
(2)实验中,用如图所示的方式悬挂钩码,杠杆平衡是杠杆左侧多个力共同作用的结果,采用这种方式是不妥当的。这主要是因为杠杆上力和力臂数目过多。
(3)不改变支点右侧所挂的两个钩码及其位置,将左侧另外两个钩码改挂到第三个钩码的下方,即左侧的力是三个钩码,根据杠杆的平衡条件,可知应保持左侧第2格的钩码不动。
15.440
解析: 由题可知,F的力臂L1=AO=0.3 m,形状规则、质量分布均匀的物体,重心在其几何中心,所以AB的重力作用点在AB的中点,重力方向竖直向下,所以重力的力臂:L2=12AB-AO=12×
2.8 m-0.3 m=1.1 m,由杠杆的平衡条件F1L1=F2L2,可知F×0.3 m=120 N×1.1 m,则F=440 N。
16.25
17.75 解析: 由图可知,O点为支点,OA为动力臂,OB为阻力臂,阻力大小等于所挂物体的重力,作用在A点的拉力为动力;由杠杆的平衡条件可知,动力F=60 N×0.5 m0.4 m=75 N。
18.如图所示 40
解析: 反向延长力F的作用线,过支点O作力F作用线的垂线段即为F的力臂L1,因为右端施加的力F与水平方向成30°的夹角,由几何知识可知L1=12BO,
已知BO=3AO,物体的质量m为6 kg,则物体的重力:
G=mg=6 kg×10 N/kg=60 N,
由杠杆的平衡条件得G×L2=F×L1,
即G×AO=F×12BO,
代入数据可得,60 N×AO=F×12×3AO,
解得F=40 N。
19.由图可知,支点是O点,肱二头肌对前臂产生的拉力F1为动力,铅球的重力为阻力F2,
则阻力:F2=G=mg=3 kg×10 N/kg=30 N,
由图知,L1=OA=0.03 m,L2=OB=0.30 m,
根据杠杆的平衡条件:F1L1=F2L2,
即F1×0.03 m=30 N×0.30 m,解得F1=300 N。
20.(1)4 (2)C
解析: (1)杠杆在水平位置平衡,由杠杆平衡条件得GM×OA=GN×OB,即2 N×0.2 m=GN×0.1 m,解得GN=4 N。
(2)要使杠杆在图乙所示位置保持平衡,右端力与力臂的乘积也应该不变,力的大小不变,方向不变,则力臂应仍为OB的长度,根据力臂的定义,物块N应移动到②处。
第1课时 杠杆及其平衡条件
题组1 杠杆及其五要素
1.在如图所示的杠杆中,O点是________,若重物G对杠杆的拉力是阻力,则F是________,动力臂是________,阻力臂是________。
2.下列关于杠杆的说法正确的是( )
A.杠杆不一定是硬棒 B.支点一定在杠杆的中点
C.杠杆一定是直的 D.杠杆可以是弯的
3.如图所示,工人师傅将油桶推上台阶,下列说法中正确的是( )
A.这不能看作杠杆,因为油桶是圆的
B.这不能看作杠杆,因为没有支点
C.这可以看作杠杆,因为满足杠杆的所有条件
D.这可以看作杠杆,支点就是横截面的圆心
4.图中开瓶器开启瓶盖时可抽象为一杠杆,不计自重。图中能正确表示它工作示意图的是( )
5.如图所示的皮划艇运动员一只手支撑住桨柄的末端,另一只手用力划桨,此时的船桨可看作一个杠杆。图中的船桨模型中最合理的是( )
题组2 力臂及其画法
6.关于力臂,下列说法中正确的是( )
A.力臂一定在杠杆上 B.力臂不可能等于零
C.从支点到动力作用点的距离叫动力臂 D.从支点到力的作用线的距离叫力臂
7.如图所示的杠杆AOB,支点为O,作用在A点的动力F的力臂是图中的( )
A.OD B.OF C.OA D.OC
8.2020·益阳如图所示是指甲剪的示意图,F是剪指甲时施加的一个力,则下列关于指甲剪的说法正确的是( )
A.指甲剪只由一个杠杆组成
B.指甲剪由两个杠杆组成
C.对杠杆ABC,若以B为支点,则动力臂是L
D.对杠杆ABC,若以B为支点,则动力臂是BC
9. 如图所示,拉杆式行李箱在拉力F的作用下静止在斜坡上,请画出行李箱受到的重力G的示意图以及拉力F的力臂L。
10.如图所示,轻质杠杆在力F1、F2的作用下(F2未画出)处于平衡状态。O为支点,L2为F2的力臂,请在图中画出F1的力臂L1和力F2的示意图。
题组3 探究杠杆的平衡条件
11.小华研究杠杆平衡条件的实验装置如图所示,使用的每个钩码的质量均为
50 g,杠杆上相临刻度线的距离相等。(g取10 N/kg)
(1)如果使用弹簧测力计在图中杠杆的A点竖直向下拉,当杠杆水平平衡时,弹簧测力计的示数为________N。
(2)实验中不使用其他物体而选择使用钩码的好处是________。
12.如图所示为探究杠杆平衡条件的实验装置,若每个钩码的质量为50 g,为了让杠杆在水平位置平衡,下列判断正确的是( )
A.在A点挂4个钩码能使杠杆平衡
B.在B点用弹簧测力计竖直向下拉,当示数为0.5 N时,能使杠杆平衡
C.用弹簧测力计在B点拉,无论如何改变用力方向都会省力
D.用弹簧测力计在A点拉,无论如何改变用力方向都会费力
13.小明利用刻度均匀的轻质杠杆探究“杠杆的平衡条件”实验,已知每个钩码重0.5 N。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向________(选填“左”或“右”)调节,直到杠杆在水平位置平衡。你认为实验中让杠杆在水平位置平衡的好处是_________________________________________。
(2)在图甲中的A点悬挂4个钩码,要使杠杆仍保持水平位置平衡,需在B点悬挂 ________个钩码。
(3)如图乙所示,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,仍使杠杆在水平位置平衡,弹簧测力计的拉力为 ________ N ;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然在水平位置平衡,则弹簧测力计的读数将________(选填“变大”“变小”或“不变”);若此时斜向右上方的弹簧测力计与竖直方向间的夹角为60°,杠杆在水平位置平衡时,弹簧测力计的读数为________ N。
14.小明同学做“探究杠杆的平衡条件”的实验。
(1)小明通过实验,得出了如下表所示的数据,根据数据得出杠杆的平衡条件:动力+动力臂=阻力+阻力臂,你认为他的实验过程存在什么问题?
写出两点:______________________;______________________。
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
4
5
5
4
(2)实验中,小明用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒他不要采用这种方式,主要是因为________。(填字母)
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(3)小明马上进行了改正,他不改变支点右侧所挂的两个钩码及其位置,保持左侧第________格的钩码不动,将支点左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。
题组4 杠杆平衡条件的计算
15.停车场入口处常用横杆来控制车辆的进出 ,如图甲所示。我们可以把该装置简化成如图乙所示的杠杆。若横杆AB粗细相同、质量分布均匀,重力G=120 N,AB=2.8 m,AO=0.3 m。要使横杆AB保持水平平衡,需在A端施加竖直向下的力F=________N。
16.如图所示,一根粗细均匀的杠杆,等距处标注了刻度,杠杆可绕A端转动,当在B处施加15 N竖直向上的拉力F时,杠杆刚好水平平衡,则杠杆自重为________N。
17.如图所示,O为杠杆的支点,OA=40 cm,AB=10 cm,B点所挂物体重60 N,要使杠杆在水平位置平衡,则在A点至少加一个大小为________N的动力。(杠杆自重忽略不计)
18.如图所示,轻杆AB悬于O点,BO=3AO,其左端挂一质量为6 kg的物体,右端施加一个与水平方向成30°夹角的力F,此时轻杆水平平衡。请画出力F的力臂,并算出其大小为________N。(g取10 N/kg)
19.如图甲所示为前臂平伸用手掌托住铅球时的情形。我们可将图甲简化成如图乙所示的杠杆,不计杠杆自重。若铅球质量m=3 kg,OA=0.03 m,OB=0.30 m,求此时肱二头肌对前臂产生的拉力F1的大小。(g取10 N/kg)
20.如图所示是小柯制作的“杠杆力臂演示仪”,杠杆AOB可绕O点(螺母)转动,OA=0.2 m,OB=0.1 m,GM=2 N,杠杆自重和摩擦忽略不计,固定装置未画出。
(1)当杠杆处于如图甲所示的水平位置平衡时,物块N的重力GN为________N。
(2)松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB′(B′点对应B点),保持M位置不变,要使杠杆在图乙所示位置保持平衡,则应将物块N移动到________(填字母)。
A.O点处 B.①处
C.②处 D.③处
答案详析
1.支点 动力 OA OB
2.D
3.C
4.B 解析: 开瓶器开启瓶盖时可抽象为一杠杆,动力向上,且力臂比较长;而阻力向下,且力臂比较短;两个力都在支点的右侧。
5.B 解析: 由题意可知,撑住桨柄的末端为支点,下面的手给桨向后的力,这时水给桨一个向前的力,所以皮划艇前进。
6.D
7.D
8.C 解析: 由图可知,指甲剪由三个杠杆组成,故A和B均错误;力臂是支点到力的作用线的距离,而不是支点到力的作用点的距离,对杠杆ABC,若以B为支点,则动力臂是L,故C正确,D错误。
9.如图所示
10.如图所示
11.(1)1
(2)便于读取力的大小(或使力成倍改变,便于寻找规律)
解析: (1)每个钩码的重力:G=mg=50×10-3 kg×10 N/kg=0.5 N,由图可知,OB∶OA=2∶3,因为F×OA=3G×OB,所以F=3G×OBOA=3×0.5 N×23=1 N。(2)因为每个钩码的质量相等且质量已知,所以实验中使用钩码,便于读取力的大小(或使力成倍改变,便于寻找规律)。
12.D
13.(1)右 便于测量力臂
(2)2
(3)1 变大 2
解析: (1)杠杆左端下沉,应将平衡螺母向右调节;实验中让杠杆在水平位置平衡的好处是便于测量力臂。(2)在A点悬挂4个钩码,其力臂为2个格子;B点的力臂为4个格子,则要使杠杆仍保持水平位置平衡,需在B点悬挂2个钩码。(3)4个钩码重2 N,力臂为2个格子;C点的力臂为4个格子,则弹簧测力计的拉力为1 N;若改变拉力的方向,拉力的力臂减小,拉力将变大;若弹簧测力计与竖直方向间的夹角为60°,则其力臂为OC的一半,即2个格子,弹簧测力计的读数应为2 N。
14.(1)实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论 单位不同的两个物理量不能相加
(2)D (3)2
解析: (1)小明同学的结论:动力+动力臂=阻力+阻力臂,没有意义,且实验数据只有一组,应多做几次实验,得到多组数据,分析找到结论;单位不同的两个物理量不能相加。
(2)实验中,用如图所示的方式悬挂钩码,杠杆平衡是杠杆左侧多个力共同作用的结果,采用这种方式是不妥当的。这主要是因为杠杆上力和力臂数目过多。
(3)不改变支点右侧所挂的两个钩码及其位置,将左侧另外两个钩码改挂到第三个钩码的下方,即左侧的力是三个钩码,根据杠杆的平衡条件,可知应保持左侧第2格的钩码不动。
15.440
解析: 由题可知,F的力臂L1=AO=0.3 m,形状规则、质量分布均匀的物体,重心在其几何中心,所以AB的重力作用点在AB的中点,重力方向竖直向下,所以重力的力臂:L2=12AB-AO=12×
2.8 m-0.3 m=1.1 m,由杠杆的平衡条件F1L1=F2L2,可知F×0.3 m=120 N×1.1 m,则F=440 N。
16.25
17.75 解析: 由图可知,O点为支点,OA为动力臂,OB为阻力臂,阻力大小等于所挂物体的重力,作用在A点的拉力为动力;由杠杆的平衡条件可知,动力F=60 N×0.5 m0.4 m=75 N。
18.如图所示 40
解析: 反向延长力F的作用线,过支点O作力F作用线的垂线段即为F的力臂L1,因为右端施加的力F与水平方向成30°的夹角,由几何知识可知L1=12BO,
已知BO=3AO,物体的质量m为6 kg,则物体的重力:
G=mg=6 kg×10 N/kg=60 N,
由杠杆的平衡条件得G×L2=F×L1,
即G×AO=F×12BO,
代入数据可得,60 N×AO=F×12×3AO,
解得F=40 N。
19.由图可知,支点是O点,肱二头肌对前臂产生的拉力F1为动力,铅球的重力为阻力F2,
则阻力:F2=G=mg=3 kg×10 N/kg=30 N,
由图知,L1=OA=0.03 m,L2=OB=0.30 m,
根据杠杆的平衡条件:F1L1=F2L2,
即F1×0.03 m=30 N×0.30 m,解得F1=300 N。
20.(1)4 (2)C
解析: (1)杠杆在水平位置平衡,由杠杆平衡条件得GM×OA=GN×OB,即2 N×0.2 m=GN×0.1 m,解得GN=4 N。
(2)要使杠杆在图乙所示位置保持平衡,右端力与力臂的乘积也应该不变,力的大小不变,方向不变,则力臂应仍为OB的长度,根据力臂的定义,物块N应移动到②处。