2.5 制作循迹机器人 课件(19张PPT)
文档属性
| 名称 | 2.5 制作循迹机器人 课件(19张PPT) |

|
|
| 格式 | ppt | ||
| 文件大小 | 1.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2021-01-29 00:00:00 | ||
图片预览





文档简介
轨迹识别传感器
传感红外探头
可调电阻
轨迹识别传感器原理
红外发射器
红外接收器
轨迹识别传感器原理
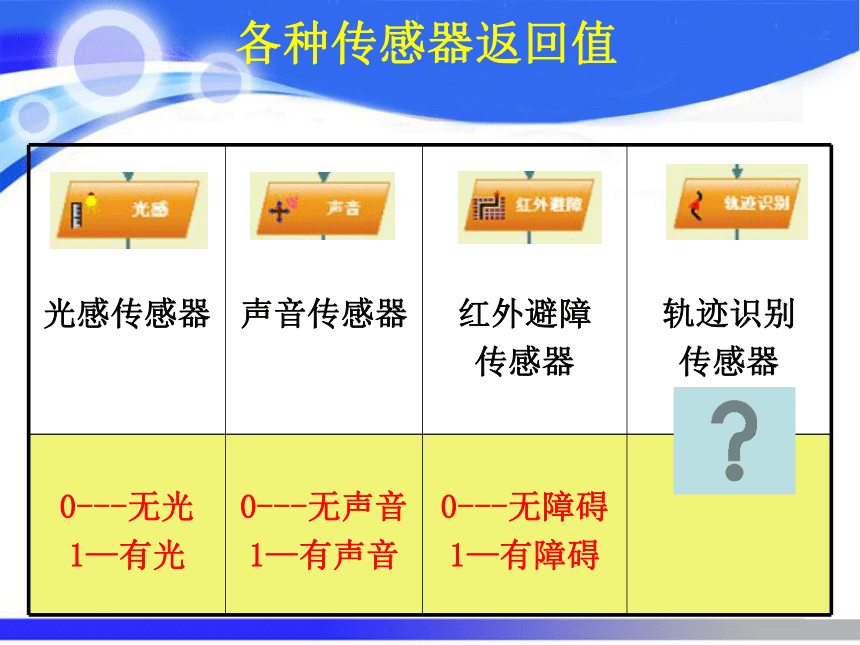
各种传感器返回值
光感传感器
声音传感器
红外避障
传感器
轨迹识别
传感器
0---无光
1—有光
0---无声音
1—有声音
0---无障碍
1—有障碍
轨迹识别传感器左右探测状态及返回值
轨迹探头
数据显示
左
右
0 无信号 无信号
1 有信号 无信号
2 无信号 有信号
3 有信号 有信号
机器人与轨迹的位置关系
1
2
3
0
返回值与机器人需执行动作对应表
轨迹变量的返回值
机器人的状态
需要执行
的动作
具体指令
0
不在线上
小转弯去找线
在左侧就右转,在右侧就左转
1
轨迹线的右边缘
左转
高速电机左边速度比右边小
2
轨迹线的左边缘
右转
高速电机左边速度比右边大
3
轨迹线上
直行
高速电机左右边速度一样
1
2
3
0
循迹机器人程序
轨迹变量==1
是
否
轨迹变量==2
是
否
轨迹变量==3
是
否
左电机:5,右电机:10
左电机:10,右电机:5
左电机:10,右电机:10
左电机:10,右电机:5
仿真轨迹
任务:完成循迹机器人的仿真实验
探究
机器人在循迹的时候,如果前方出现了障碍物,机器人如何能避开障碍物再次回到轨迹呢?请尝试修改程序,然后仿真
D
1.下图是一个循迹机器人,此时,轨迹变量的返回值是( )。
A.0
B.1
C.2
D.3
D
A.轨迹线上、直行
B.不在线上,左转或右转都可以
C.轨迹线的左边缘、左转
D.轨迹线的右边缘、左转
C
3.设计循规机器人程序时,当轨迹变量的返回值为3时,
需要设置的指令是( )
A.高速电机左电机转速比右电机转速小
B.高速电机右电机转速比左电机转速小
C.高速电机左、右电机速度一样
D.任意设置高速电机左、右电机速度都可以
D
4.关于调试轨迹识别传感器,以下哪句话是错误的? ( )
A.地面轨迹不应该太光滑。
B.轨迹颜色与周围颜色差别应该尽量大。
C.尽量将两组轨迹识别传感器的灵敏度调成一致。
D.高速电机的速度值和转弯的幅度应该调到最大值。
C
5.轨迹识别传感器主要是根据( )判断地面的轨迹。
A.声音的大小
B.光线的强弱
C.颜色的差别
D.表面的凹凸
传感红外探头
可调电阻
轨迹识别传感器原理
红外发射器
红外接收器
轨迹识别传感器原理
各种传感器返回值
光感传感器
声音传感器
红外避障
传感器
轨迹识别
传感器
0---无光
1—有光
0---无声音
1—有声音
0---无障碍
1—有障碍
轨迹识别传感器左右探测状态及返回值
轨迹探头
数据显示
左
右
0 无信号 无信号
1 有信号 无信号
2 无信号 有信号
3 有信号 有信号
机器人与轨迹的位置关系
1
2
3
0
返回值与机器人需执行动作对应表
轨迹变量的返回值
机器人的状态
需要执行
的动作
具体指令
0
不在线上
小转弯去找线
在左侧就右转,在右侧就左转
1
轨迹线的右边缘
左转
高速电机左边速度比右边小
2
轨迹线的左边缘
右转
高速电机左边速度比右边大
3
轨迹线上
直行
高速电机左右边速度一样
1
2
3
0
循迹机器人程序
轨迹变量==1
是
否
轨迹变量==2
是
否
轨迹变量==3
是
否
左电机:5,右电机:10
左电机:10,右电机:5
左电机:10,右电机:10
左电机:10,右电机:5
仿真轨迹
任务:完成循迹机器人的仿真实验
探究
机器人在循迹的时候,如果前方出现了障碍物,机器人如何能避开障碍物再次回到轨迹呢?请尝试修改程序,然后仿真
D
1.下图是一个循迹机器人,此时,轨迹变量的返回值是( )。
A.0
B.1
C.2
D.3
D
A.轨迹线上、直行
B.不在线上,左转或右转都可以
C.轨迹线的左边缘、左转
D.轨迹线的右边缘、左转
C
3.设计循规机器人程序时,当轨迹变量的返回值为3时,
需要设置的指令是( )
A.高速电机左电机转速比右电机转速小
B.高速电机右电机转速比左电机转速小
C.高速电机左、右电机速度一样
D.任意设置高速电机左、右电机速度都可以
D
4.关于调试轨迹识别传感器,以下哪句话是错误的? ( )
A.地面轨迹不应该太光滑。
B.轨迹颜色与周围颜色差别应该尽量大。
C.尽量将两组轨迹识别传感器的灵敏度调成一致。
D.高速电机的速度值和转弯的幅度应该调到最大值。
C
5.轨迹识别传感器主要是根据( )判断地面的轨迹。
A.声音的大小
B.光线的强弱
C.颜色的差别
D.表面的凹凸