第7课 《仿真机器人避障》精品课件(19ppt)
文档属性
| 名称 | 第7课 《仿真机器人避障》精品课件(19ppt) |

|
|
| 格式 | zip | ||
| 文件大小 | 3.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 闽教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2021-03-05 00:00:00 | ||
图片预览

文档简介
(共19张PPT)
第七课
仿真机器人避障
学习任务
1.了解红外避障传感器的组成。
2.分析扫地机器人的行走规律。
3.编写程序,在虚拟环境中模拟扫地机器人躲避障碍行走。
开阔视野
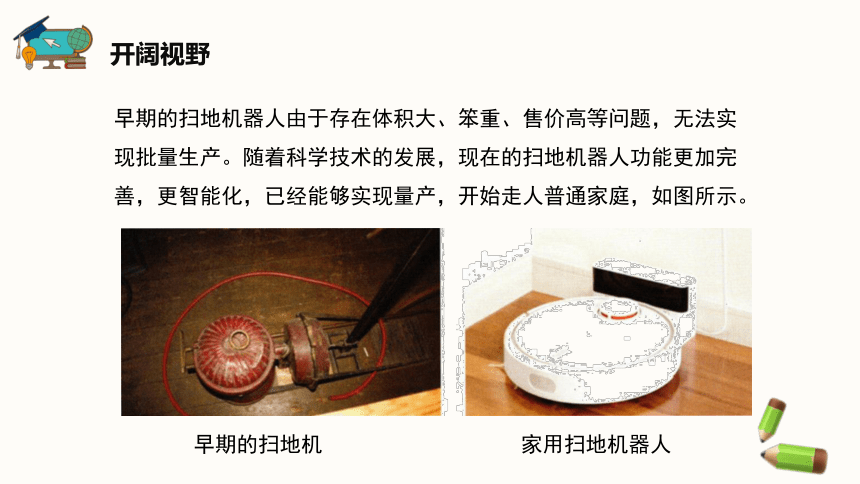
早期的扫地机器人由于存在体积大、笨重、售价高等问题,无法实现批量生产。随着科学技术的发展,现在的扫地机器人功能更加完善,更智能化,已经能够实现量产,开始走人普通家庭,如图所示。
家用扫地机器人
早期的扫地机
探究活动
与早期的扫地机器人相比,现在的扫地机器人更加智能,躲避障碍的能力也更强。
活动主题:在仿真环境中模拟机器人躲避障碍行走
想让机器人避开障碍物,首先要让它能看到障碍物。所以我们需要为扫地机器人安装上“眼睛”,使它拥有能看到障碍物的“器官”;然后编写自动躲避障碍的控制程序,让扫地机器人能根据检测到的障碍物情况进行合理避障。
活动主题:在仿真环境中模拟机器人躲避障碍行走
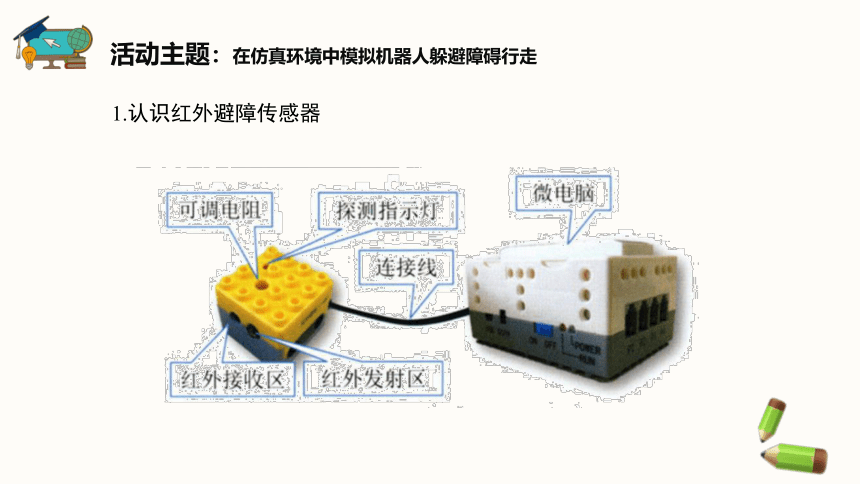
1.认识红外避障传感器
活动主题:在仿真环境中模拟机器人躲避障碍行走
红外线发射区发射的红外线遇到障碍物发生反射,反射的红外线被红外线接收区接收到时,探测指示灯会亮起。此时,红外避障传感器会把发现障碍物的这个信息传输给机器人的微电脑,机器人就知道了障碍物的存在。
通过调节红外避障传感器的可调电阻,可以调节可探测到的障碍物的距离。顺时针调节,探测距离变远;逆时针调节,探测距离变近。
活动主题:在仿真环境中模拟机器人躲避障碍行走
2.扫地机器人的工作情况
扫地机器人拥有了“眼睛”之后,就可以看到障碍物了。在此基础上,还要让扫地机器人在执行任务时一直保持识别、躲避障碍物的状态,直到任务完成。
扫地机器人躲避障碍物的过程可以用示意图表示出来,如图所示。
活动主题:在仿真环境中模拟机器人躲避障碍行走
扫地机器人躲避障碍物的示意图
根据示意图所示,我们在RC软件中,编写指挥仿真扫地机器人执行任务的程序。
活动主题:在仿真环境中模拟机器人躲避障碍行走
3.编写仿真程序
(1)启动RC软件,认识程序主界面RC软件主界面如图所示,由菜单栏、工具栏、模块库、流程图生成区、状态栏等部分组成。
活动主题:在仿真环境中模拟机器人躲避障碍行走
RC编程软件的主界面
红外避障变量1、2、3、4,分别对应着仿真状态下机器人的前、左、右、后四个方向。
活动主题:在仿真环境中模拟机器人躲避障碍行走
(2)添加“永久循环”及“红外避障”模块
活动主题:在仿真环境中模拟机器人躲避障碍行走
(3)添加“条件判断”模块
“条件判断”模块
活动主题:在仿真环境中模拟机器人躲避障碍行走
(4)添加“转向”和“高速电机”模块
“转向”和“高速电机”模块
活动主题:在仿真环境中模拟机器人躲避障碍行走
4.仿真测试机器人
单击按钮
,进入仿真环境,制作一个简单的用于仿真扫地机器人工作的仿真地图环境。
单击工具栏上的“仿真”图标
琴或“3D仿真”图标
,然后将仿真机器人放入仿真环境中进行测试。
活动主题:在仿真环境中模拟机器人躲避障碍行走
(1)超声波传感器
“仿真”和“3D仿真”的仿真效果
现实生活中,有的扫地机器人遇到障碍时,并不会立刻转向,而是会后退一步再转向,这样可以更好地躲避障碍物。修改程序,让仿真扫地机器人以同样的动作躲避障碍物。
如果有实体机器人,可以用下载线将机器人与计算机进行连接,点击工具栏中的按钮丛
,将程序下载到
其中。然后将机器人放在周围有障
碍物的环境中,打开电源运行即可。
创新活动
实体机器人
活动评价
了解红外避障传感器的工作原理
☆☆☆
理解扫地机器人躲避障碍的原理
☆☆☆
掌握躲避障碍程序的编写方法
☆☆☆
遇到困难时的表现:
□自己解决
□请教同学
□请教老师
□参考教材
□小组讨论
通过本节课的学习,谈一谈你有哪些收获呢?
你的收获
课堂小结
第七课
仿真机器人避障
学习任务
1.了解红外避障传感器的组成。
2.分析扫地机器人的行走规律。
3.编写程序,在虚拟环境中模拟扫地机器人躲避障碍行走。
开阔视野
早期的扫地机器人由于存在体积大、笨重、售价高等问题,无法实现批量生产。随着科学技术的发展,现在的扫地机器人功能更加完善,更智能化,已经能够实现量产,开始走人普通家庭,如图所示。
家用扫地机器人
早期的扫地机
探究活动
与早期的扫地机器人相比,现在的扫地机器人更加智能,躲避障碍的能力也更强。
活动主题:在仿真环境中模拟机器人躲避障碍行走
想让机器人避开障碍物,首先要让它能看到障碍物。所以我们需要为扫地机器人安装上“眼睛”,使它拥有能看到障碍物的“器官”;然后编写自动躲避障碍的控制程序,让扫地机器人能根据检测到的障碍物情况进行合理避障。
活动主题:在仿真环境中模拟机器人躲避障碍行走
1.认识红外避障传感器
活动主题:在仿真环境中模拟机器人躲避障碍行走
红外线发射区发射的红外线遇到障碍物发生反射,反射的红外线被红外线接收区接收到时,探测指示灯会亮起。此时,红外避障传感器会把发现障碍物的这个信息传输给机器人的微电脑,机器人就知道了障碍物的存在。
通过调节红外避障传感器的可调电阻,可以调节可探测到的障碍物的距离。顺时针调节,探测距离变远;逆时针调节,探测距离变近。
活动主题:在仿真环境中模拟机器人躲避障碍行走
2.扫地机器人的工作情况
扫地机器人拥有了“眼睛”之后,就可以看到障碍物了。在此基础上,还要让扫地机器人在执行任务时一直保持识别、躲避障碍物的状态,直到任务完成。
扫地机器人躲避障碍物的过程可以用示意图表示出来,如图所示。
活动主题:在仿真环境中模拟机器人躲避障碍行走
扫地机器人躲避障碍物的示意图
根据示意图所示,我们在RC软件中,编写指挥仿真扫地机器人执行任务的程序。
活动主题:在仿真环境中模拟机器人躲避障碍行走
3.编写仿真程序
(1)启动RC软件,认识程序主界面RC软件主界面如图所示,由菜单栏、工具栏、模块库、流程图生成区、状态栏等部分组成。
活动主题:在仿真环境中模拟机器人躲避障碍行走
RC编程软件的主界面
红外避障变量1、2、3、4,分别对应着仿真状态下机器人的前、左、右、后四个方向。
活动主题:在仿真环境中模拟机器人躲避障碍行走
(2)添加“永久循环”及“红外避障”模块
活动主题:在仿真环境中模拟机器人躲避障碍行走
(3)添加“条件判断”模块
“条件判断”模块
活动主题:在仿真环境中模拟机器人躲避障碍行走
(4)添加“转向”和“高速电机”模块
“转向”和“高速电机”模块
活动主题:在仿真环境中模拟机器人躲避障碍行走
4.仿真测试机器人
单击按钮
,进入仿真环境,制作一个简单的用于仿真扫地机器人工作的仿真地图环境。
单击工具栏上的“仿真”图标
琴或“3D仿真”图标
,然后将仿真机器人放入仿真环境中进行测试。
活动主题:在仿真环境中模拟机器人躲避障碍行走
(1)超声波传感器
“仿真”和“3D仿真”的仿真效果
现实生活中,有的扫地机器人遇到障碍时,并不会立刻转向,而是会后退一步再转向,这样可以更好地躲避障碍物。修改程序,让仿真扫地机器人以同样的动作躲避障碍物。
如果有实体机器人,可以用下载线将机器人与计算机进行连接,点击工具栏中的按钮丛
,将程序下载到
其中。然后将机器人放在周围有障
碍物的环境中,打开电源运行即可。
创新活动
实体机器人
活动评价
了解红外避障传感器的工作原理
☆☆☆
理解扫地机器人躲避障碍的原理
☆☆☆
掌握躲避障碍程序的编写方法
☆☆☆
遇到困难时的表现:
□自己解决
□请教同学
□请教老师
□参考教材
□小组讨论
通过本节课的学习,谈一谈你有哪些收获呢?
你的收获
课堂小结