2021年吉林省吉林市高考物理二调试卷(解析版)
文档属性
| 名称 | 2021年吉林省吉林市高考物理二调试卷(解析版) |
|
|
| 格式 | zip | ||
| 文件大小 | 539.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版(新课程标准) | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-03-23 00:00:00 | ||
图片预览
文档简介
2021年吉林省吉林市高考物理二调试卷
一、选择题(共56分)本卷共12小题,1-8题为单选,每题4分,不选或错选的得0分;9-12题为多选,每题6分,全选对的得6分,选对但不全得3分,有选错或不答的得0分。将你的答案填写在“答题纸”对应的题号处
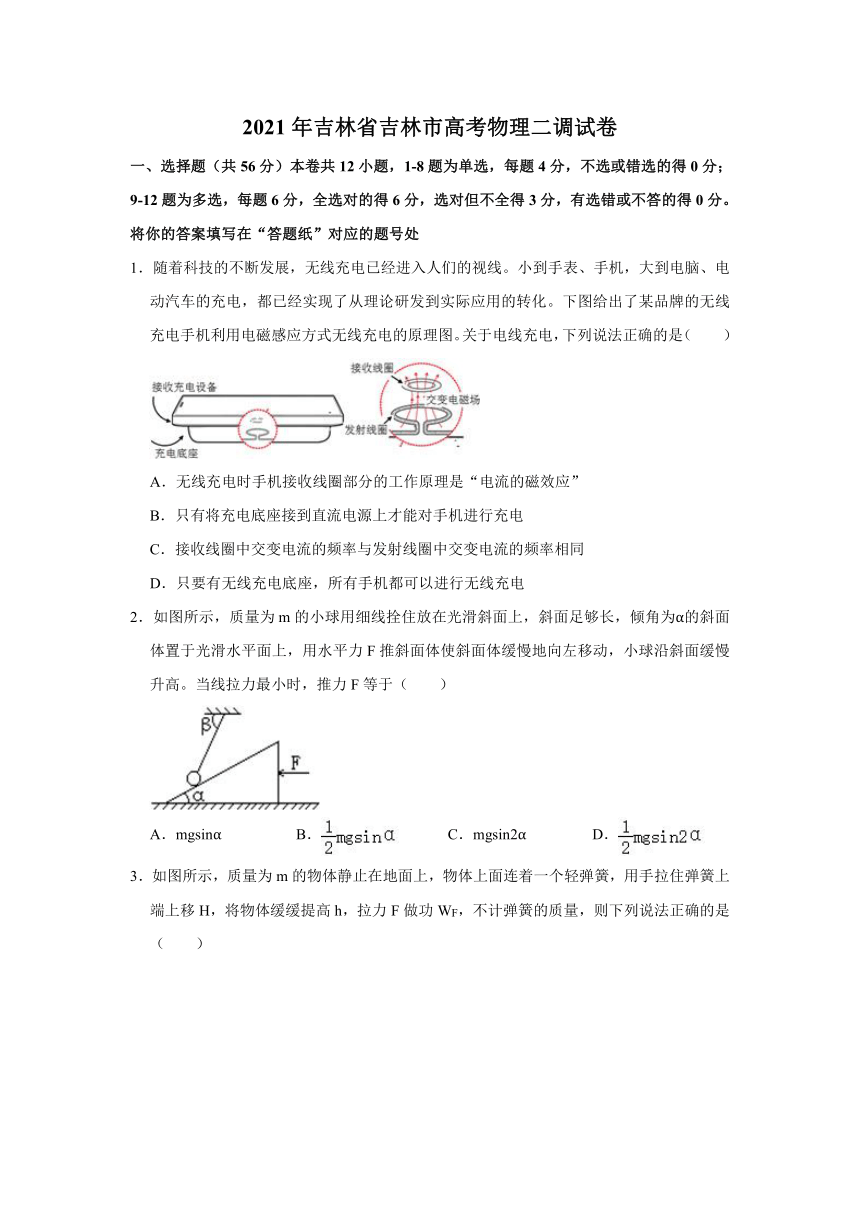
1.随着科技的不断发展,无线充电已经进入人们的视线。小到手表、手机,大到电脑、电动汽车的充电,都已经实现了从理论研发到实际应用的转化。下图给出了某品牌的无线充电手机利用电磁感应方式无线充电的原理图。关于电线充电,下列说法正确的是( )
A.无线充电时手机接收线圈部分的工作原理是“电流的磁效应”
B.只有将充电底座接到直流电源上才能对手机进行充电
C.接收线圈中交变电流的频率与发射线圈中交变电流的频率相同
D.只要有无线充电底座,所有手机都可以进行无线充电
2.如图所示,质量为m的小球用细线拴住放在光滑斜面上,斜面足够长,倾角为α的斜面体置于光滑水平面上,用水平力F推斜面体使斜面体缓慢地向左移动,小球沿斜面缓慢升高。当线拉力最小时,推力F等于( )
A.mgsinα
B.
C.mgsin2α
D.
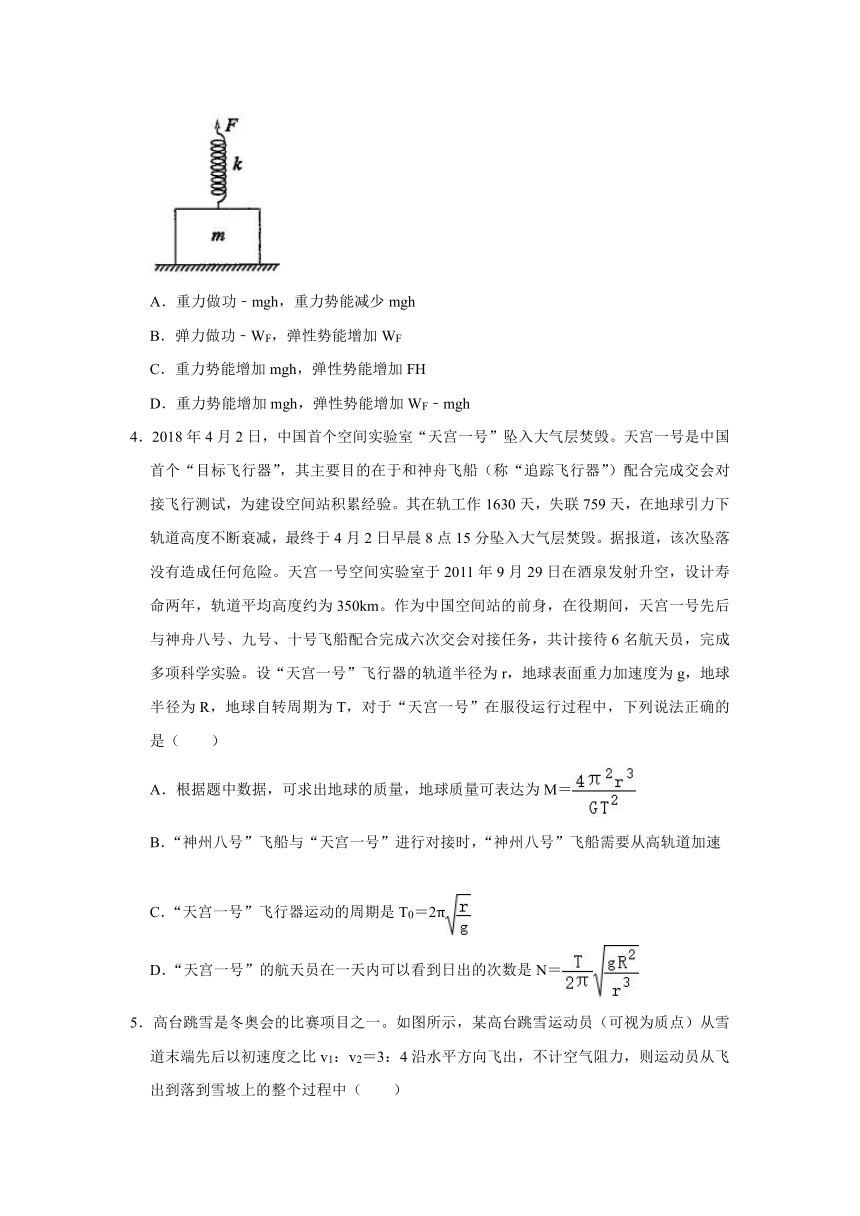
3.如图所示,质量为m的物体静止在地面上,物体上面连着一个轻弹簧,用手拉住弹簧上端上移H,将物体缓缓提高h,拉力F做功WF,不计弹簧的质量,则下列说法正确的是( )
A.重力做功﹣mgh,重力势能减少mgh
B.弹力做功﹣WF,弹性势能增加WF
C.重力势能增加mgh,弹性势能增加FH
D.重力势能增加mgh,弹性势能增加WF﹣mgh
4.2018年4月2日,中国首个空间实验室“天宫一号”坠入大气层焚毁。天宫一号是中国首个“目标飞行器”,其主要目的在于和神舟飞船(称“追踪飞行器”)配合完成交会对接飞行测试,为建设空间站积累经验。其在轨工作1630天,失联759天,在地球引力下轨道高度不断衰减,最终于4月2日早晨8点15分坠入大气层焚毁。据报道,该次坠落没有造成任何危险。天宫一号空间实验室于2011年9月29日在酒泉发射升空,设计寿命两年,轨道平均高度约为350km。作为中国空间站的前身,在役期间,天宫一号先后与神舟八号、九号、十号飞船配合完成六次交会对接任务,共计接待6名航天员,完成多项科学实验。设“天宫一号”飞行器的轨道半径为r,地球表面重力加速度为g,地球半径为R,地球自转周期为T,对于“天宫一号”在服役运行过程中,下列说法正确的是( )
A.根据题中数据,可求出地球的质量,地球质量可表达为M=
B.“神州八号”飞船与“天宫一号”进行对接时,“神州八号”飞船需要从高轨道加速
C.“天宫一号”飞行器运动的周期是T0=2π
D.“天宫一号”的航天员在一天内可以看到日出的次数是N=
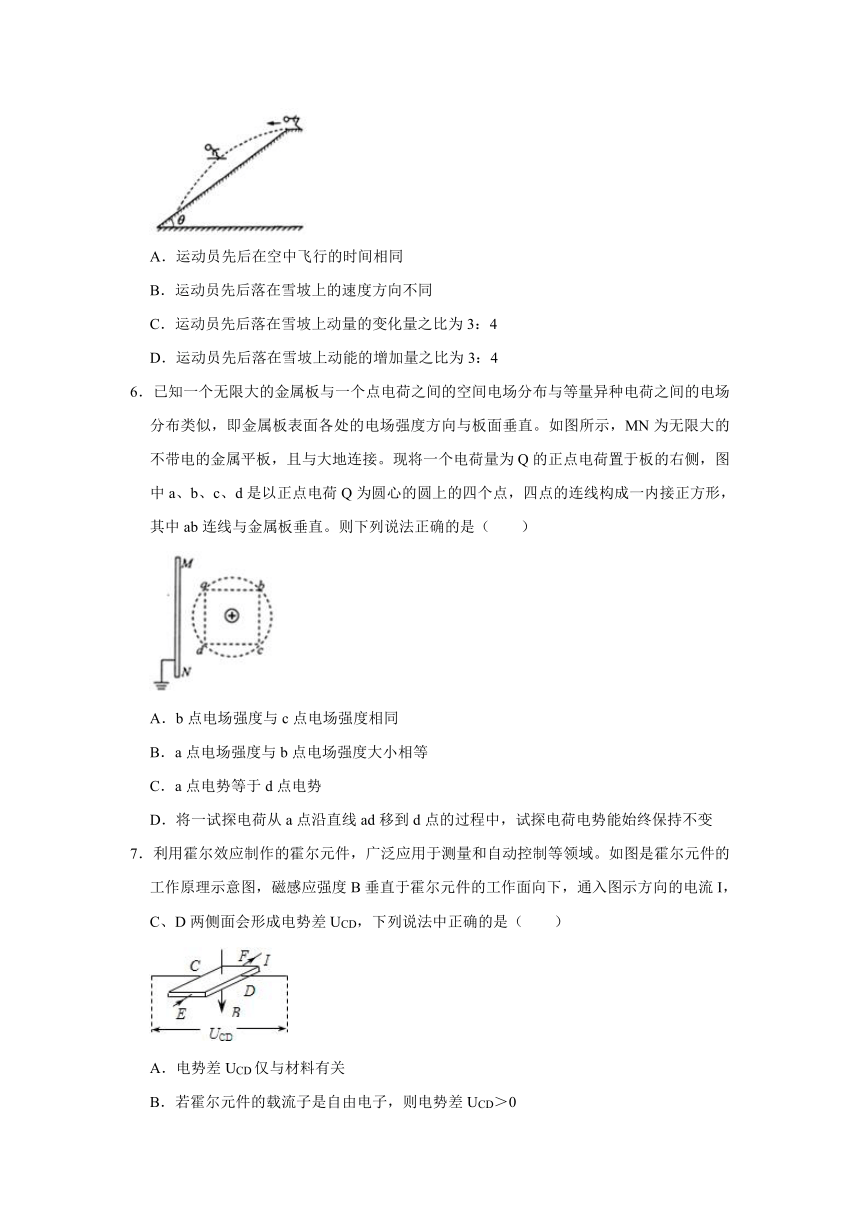
5.高台跳雪是冬奥会的比赛项目之一。如图所示,某高台跳雪运动员(可视为质点)从雪道末端先后以初速度之比v1:v2=3:4沿水平方向飞出,不计空气阻力,则运动员从飞出到落到雪坡上的整个过程中( )
A.运动员先后在空中飞行的时间相同
B.运动员先后落在雪坡上的速度方向不同
C.运动员先后落在雪坡上动量的变化量之比为3:4
D.运动员先后落在雪坡上动能的增加量之比为3:4
6.已知一个无限大的金属板与一个点电荷之间的空间电场分布与等量异种电荷之间的电场分布类似,即金属板表面各处的电场强度方向与板面垂直。如图所示,MN为无限大的不带电的金属平板,且与大地连接。现将一个电荷量为Q的正点电荷置于板的右侧,图中a、b、c、d是以正点电荷Q为圆心的圆上的四个点,四点的连线构成一内接正方形,其中ab连线与金属板垂直。则下列说法正确的是( )
A.b点电场强度与c点电场强度相同
B.a点电场强度与b点电场强度大小相等
C.a点电势等于d点电势
D.将一试探电荷从a点沿直线ad移到d点的过程中,试探电荷电势能始终保持不变
7.利用霍尔效应制作的霍尔元件,广泛应用于测量和自动控制等领域。如图是霍尔元件的工作原理示意图,磁感应强度B垂直于霍尔元件的工作面向下,通入图示方向的电流I,C、D两侧面会形成电势差UCD,下列说法中正确的是( )
A.电势差UCD仅与材料有关
B.若霍尔元件的载流子是自由电子,则电势差UCD>0
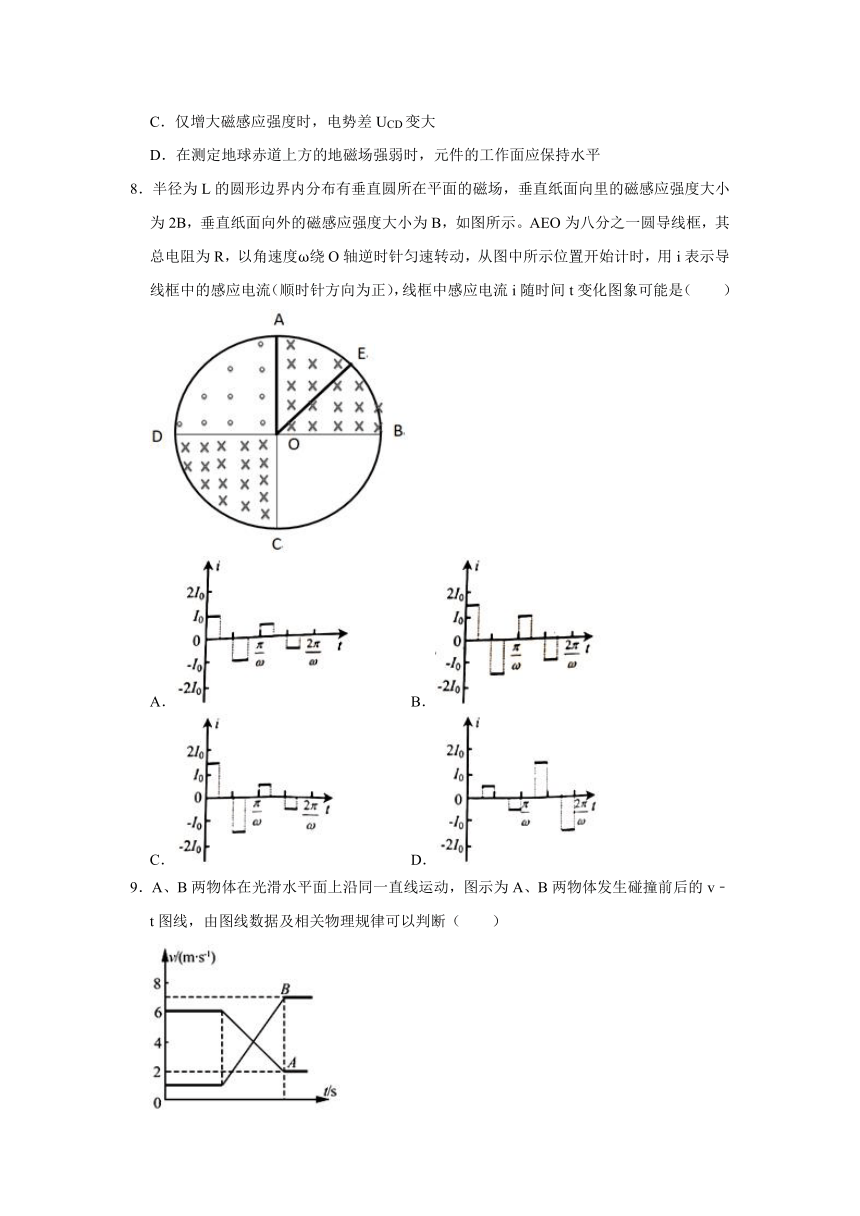
C.仅增大磁感应强度时,电势差UCD变大
D.在测定地球赤道上方的地磁场强弱时,元件的工作面应保持水平
8.半径为L的圆形边界内分布有垂直圆所在平面的磁场,垂直纸面向里的磁感应强度大小为2B,垂直纸面向外的磁感应强度大小为B,如图所示。AEO为八分之一圆导线框,其总电阻为R,以角速度ω绕O轴逆时针匀速转动,从图中所示位置开始计时,用i表示导线框中的感应电流(顺时针方向为正),线框中感应电流i随时间t变化图象可能是( )
A.
B.
C.
D.
9.A、B两物体在光滑水平面上沿同一直线运动,图示为A、B两物体发生碰撞前后的v﹣t图线,由图线数据及相关物理规律可以判断( )
A.A、B的质量比为3:2
B.A作用前后动量变化为﹣12kg?m/s
C.B作用前后动量变化为10kg?m/s
D.A、B作用前后总动能不变
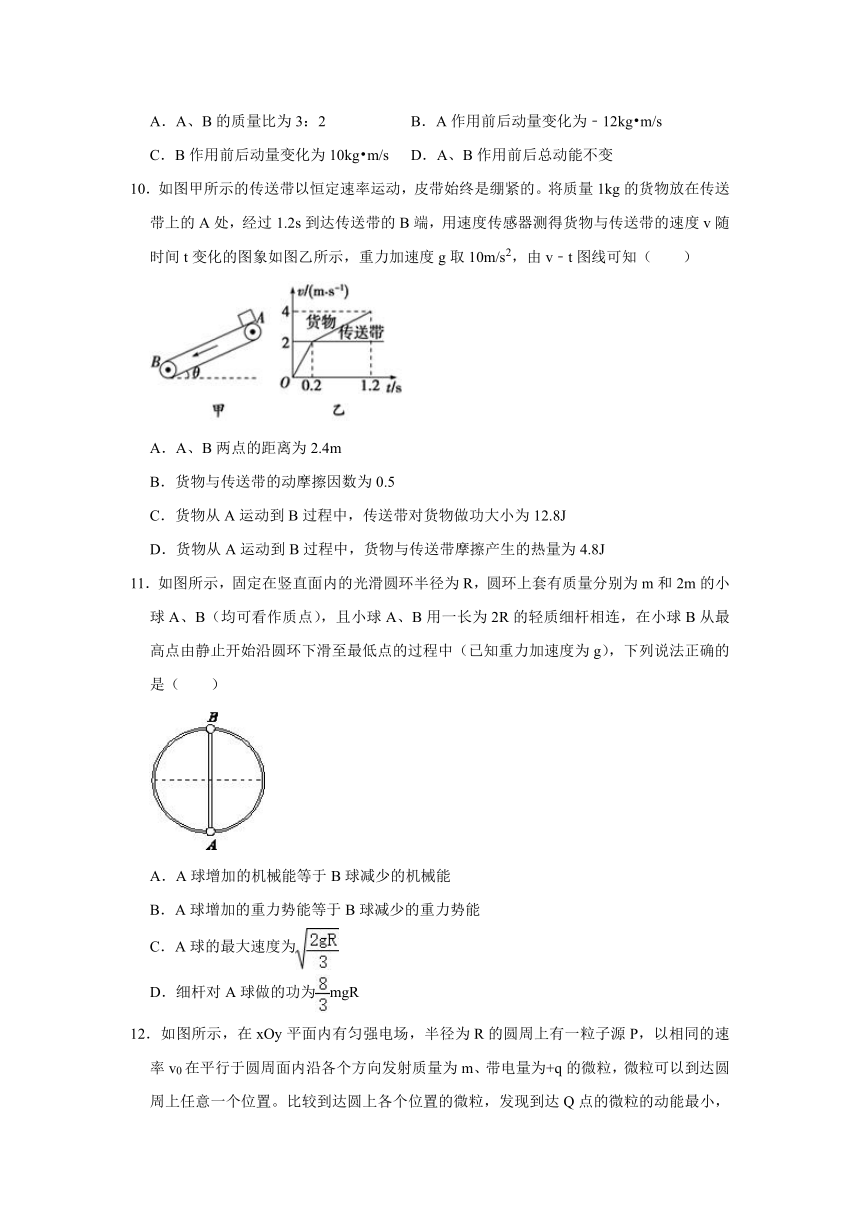
10.如图甲所示的传送带以恒定速率运动,皮带始终是绷紧的。将质量1kg的货物放在传送带上的A处,经过1.2s到达传送带的B端,用速度传感器测得货物与传送带的速度v随时间t变化的图象如图乙所示,重力加速度g取10m/s2,由v﹣t图线可知( )
A.A、B两点的距离为2.4m
B.货物与传送带的动摩擦因数为0.5
C.货物从A运动到B过程中,传送带对货物做功大小为12.8J
D.货物从A运动到B过程中,货物与传送带摩擦产生的热量为4.8J
11.如图所示,固定在竖直面内的光滑圆环半径为R,圆环上套有质量分别为m和2m的小球A、B(均可看作质点),且小球A、B用一长为2R的轻质细杆相连,在小球B从最高点由静止开始沿圆环下滑至最低点的过程中(已知重力加速度为g),下列说法正确的是( )
A.A球增加的机械能等于B球减少的机械能
B.A球增加的重力势能等于B球减少的重力势能
C.A球的最大速度为
D.细杆对A球做的功为mgR
12.如图所示,在xOy平面内有匀强电场,半径为R的圆周上有一粒子源P,以相同的速率v0在平行于圆周面内沿各个方向发射质量为m、带电量为+q的微粒,微粒可以到达圆周上任意一个位置。比较到达圆上各个位置的微粒,发现到达Q点的微粒的动能最小,从C点离开的微粒的机械能最大,已知∠BOP=30°,∠AOQ=37°,取重力加速度为g,取sin37°=0.6,cos37°=0.8,取最低点D所在水平面为零重力势能面,不计空气阻力及带电微粒间的相互作用。则( )
A.匀强电场的电场强度大小为,方向沿y轴负方向
B.匀强电场的电场强度大小为,方向沿x轴负方向
C.通过D点的微粒动能为mv02+(+)mgR
D.微粒从P点运动到Q点过程中电势能增加
二、非选择题(共54分)
13.(6分)某实验小组的同学用如图所示的装置测量滑块与斜面间的动摩擦因数μ.每次滑块都从斜面上由静止开始下滑,测出滑块每次下滑时遮光板到光电门所在位置的距离L及相应遮光时间t的值。
(1)用游标卡尺测量遮光板的宽度d,如图乙所示,则d=
cm。
(2)为测出滑块与斜面间的动摩擦因数μ,本实验还需要测出或知道的物理量是
(填下列序号)。
A.滑块和遮光板的总质量m
B.斜面的倾角θ
C.当地的重力加速度g
(3)实验中测出了多组L和t的值,若要通过线性图象来处理数据求μ值,则应作出的图象为
;
A.t2﹣L图象
B.图象
D.L2﹣t图象
C.图象
14.(9分)某学习小组测绘一个标有“4V,2.4W”的小电风扇(线圈电阻恒定)的伏安特性曲线,电风扇两端的电压需要从零逐渐增加到4V,并便于操作,实验室备有下列器材:
A.电池组(电动势为4V,内阻约为1Ω)
B.被测小电风扇,电路符号“”
C.电压表V1(量程为0~6V,内阻约为4kΩ)
D.电压表V2(量程为0~15V,内阻约为8kΩ)
E.电流表A1(量程为0~0.6A,内阻约为0.2kΩ)
F.电流表A2(量程为0~3A,内阻约为0.05kΩ)
G.滑动变阻器R1(最大阻值为5Ω,额定电流为3A)
H.滑动变阻器R2(最大阻值为2000Ω,额定电流为3A)
I.开关和导线若干
(1)实验中所用的电压表应选
(填“C”或“D”),电流表应选
(填“E”或“F”),滑动变阻器应选
(填“G”或“H”)。
(2)在图甲中所示方框内画出实验电路图。
(3)当电压表的示数大于0.5V时小电风扇才开始转动,小电风扇的伏安特性曲线如图乙所示,图中OA段是直线,AB段是曲线,A点的坐标值为(0.2A,0.5V),B点坐标值为(0.6A,4.0V),则小电风扇的电阻为
Ω,正常工作时的机械功率为
W。
15.(6分)如图所示为四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用。一架质量m=1kg的无人机,其动力系统所能提供的最大升力F=16N,无人机上升过程中最大速度为6m/s。若无人机从地面以最大升力竖直起飞,达到最大速度所用时间为3s,假设无人机竖直飞行时所受阻力大小不变。g取10m/s2,求:
(1)无人机在竖直上升过程中所受阻力Ff的大小;
(2)无人机从地面起飞竖直上升至离地面h=30m的高空所需的最短时间。
16.(14分)如图,光滑水平面上静止质量m1=1.0kg、长L=0.3m的木板,木板右端有质量m2=1.0kg的小滑块,在滑块正上方的0点用长r=0.4m的轻质细绳悬挂质量m=0.5kg的小球。将小球向右上方拉至细绳与整直方向成θ=60°的位置由静止释放,小球摆到最低点与滑块发生正碰并被反弹,碰撞时间极短,碰撞前后瞬间细绳对小球的拉力减小了4.8N,最终小滑块恰好不会从木板上滑下。不计空气阻力、滑块、小球均可视为质点,重力加速度g取10m/s2.求:
(1)小球碰前、碰后瞬间的速度大小;
(2)小滑块与木板之间的动摩擦因数。
17.(19分)如图所示,在坐标系xOy的第一象限内有方向竖直向上的匀强电场,第二象限内有磁感应强度大小为B1(未知)、方向垂直于纸面向里的匀强磁场,第三、四象限内有磁感应强度大小为B2(未知)、方向垂直于纸面向里的匀强磁场,一带电荷量为q、质量为m的带负电的粒子,从x轴上的P点(﹣L,0),沿与x轴负方向成37°角的方向向上射出,射出时的初速度大小为v0,经磁场偏转后,垂直通过y轴,粒子运动过程中第一次通过x轴时,速度方向与x轴的正方向刚好成37°角,又经过一段时间刚好从P点第二次通过x轴.不计粒子的重力.求:(sin37°=0.6,cos37°=0.8)
(1)磁感应强度B1的大小及粒子第一次通过y轴的位置;
(2)电场强度E及磁感应强度B2的大小;
(3)粒子从P点出发再回到P点所用的时间.
2021年吉林省吉林市高考物理二调试卷
参考答案与试题解析
一、选择题(共56分)本卷共12小题,1-8题为单选,每题4分,不选或错选的得0分;9-12题为多选,每题6分,全选对的得6分,选对但不全得3分,有选错或不答的得0分。将你的答案填写在“答题纸”对应的题号处
1.(4分)随着科技的不断发展,无线充电已经进入人们的视线。小到手表、手机,大到电脑、电动汽车的充电,都已经实现了从理论研发到实际应用的转化。下图给出了某品牌的无线充电手机利用电磁感应方式无线充电的原理图。关于电线充电,下列说法正确的是( )
A.无线充电时手机接收线圈部分的工作原理是“电流的磁效应”
B.只有将充电底座接到直流电源上才能对手机进行充电
C.接收线圈中交变电流的频率与发射线圈中交变电流的频率相同
D.只要有无线充电底座,所有手机都可以进行无线充电
【分析】根据电磁感应现象的原理,结合感应电动势产生的条件,即可一一求解。
【解答】解:A、无线充电时手机接收线圈部分的工作原理是电磁感应现象,不是“电流的磁效应”现象,故A错误;
B、当充电设备通以恒定直流,无线充电设备不会产生交变磁场,那么不能够正常使用,故B错误;
C、接收线圈中交变电流的频率与发射线圈中交变电流的频率相同,故C正确;
D、被充电手机内部,应该有一类似金属线圈的部件,与手机电池相连,当有交变磁场时,则出现感应电动势,那么普通手机不能够利用无线充电设备进行充电,故D错误;
故选:C。
【点评】考查充电手机的工作原理,理解电磁感应现象的运用,及产生感应电动势的条件,注意涡流的防止与应用。
2.(4分)如图所示,质量为m的小球用细线拴住放在光滑斜面上,斜面足够长,倾角为α的斜面体置于光滑水平面上,用水平力F推斜面体使斜面体缓慢地向左移动,小球沿斜面缓慢升高。当线拉力最小时,推力F等于( )
A.mgsinα
B.
C.mgsin2α
D.
【分析】先以小球为研究对象.斜面体缓慢地向左移动过程中,小球缓慢上升,合力为零.运用作图法得出线的拉力取得最小时,线与水平方向的夹角,并求出拉力的最小值,再对整体进行研究,由平衡条件求出F.
【解答】解:以小球为研究对象。小球受到重力mg、斜面的支持力N和细线的拉力T,在小球缓慢上升过程中,小球的合力为零,则N与T的合力与重力大小相等、方向相反,根据平行四边形定则作出三个位置力的合成图如图,则得当T与N垂直,即线与斜面平行时T最小,则得线的拉力最小值为
Tmin=Tmin=mgsinα。
再对小球和斜面体组成的整体研究,根据平衡条件得:
F=Tmincosα=(mgsinα)cosα=。
故选:D。
【点评】本题是动态平衡问题,关键要作出力图,运用图解法得到拉力最小的条件和最小值,
3.(4分)如图所示,质量为m的物体静止在地面上,物体上面连着一个轻弹簧,用手拉住弹簧上端上移H,将物体缓缓提高h,拉力F做功WF,不计弹簧的质量,则下列说法正确的是( )
A.重力做功﹣mgh,重力势能减少mgh
B.弹力做功﹣WF,弹性势能增加WF
C.重力势能增加mgh,弹性势能增加FH
D.重力势能增加mgh,弹性势能增加WF﹣mgh
【分析】重力势能的变化量等于负的重力所做的功,物体缓缓提高说明速度不变,拉力F做的功等于物体重力势能的变化量与弹簧弹性势能增加量之和.
【解答】解:重力势能的变化量等于负的重力所做的功,即
△EP=﹣WG=﹣(﹣mgh)=mgh
物体缓缓提高说明速度不变,所以物体动能不发生变化,
△E弹=WF+WG=WF﹣mgh
故选:D。
【点评】本题主要考查了重力势能的变化量与重力做功的关系以及能量转化关系,难度不大,属于基础题.
4.(4分)2018年4月2日,中国首个空间实验室“天宫一号”坠入大气层焚毁。天宫一号是中国首个“目标飞行器”,其主要目的在于和神舟飞船(称“追踪飞行器”)配合完成交会对接飞行测试,为建设空间站积累经验。其在轨工作1630天,失联759天,在地球引力下轨道高度不断衰减,最终于4月2日早晨8点15分坠入大气层焚毁。据报道,该次坠落没有造成任何危险。天宫一号空间实验室于2011年9月29日在酒泉发射升空,设计寿命两年,轨道平均高度约为350km。作为中国空间站的前身,在役期间,天宫一号先后与神舟八号、九号、十号飞船配合完成六次交会对接任务,共计接待6名航天员,完成多项科学实验。设“天宫一号”飞行器的轨道半径为r,地球表面重力加速度为g,地球半径为R,地球自转周期为T,对于“天宫一号”在服役运行过程中,下列说法正确的是( )
A.根据题中数据,可求出地球的质量,地球质量可表达为M=
B.“神州八号”飞船与“天宫一号”进行对接时,“神州八号”飞船需要从高轨道加速
C.“天宫一号”飞行器运动的周期是T0=2π
D.“天宫一号”的航天员在一天内可以看到日出的次数是N=
【分析】根据万有引力等于重力,可求出地球的质量,也可以根据万有引力提供向心力,来求地球的质量;飞船加速时将做离心运动;“天宫一号”绕地球做匀速圆周运动,根据万有引力提供向心力,可求出“天宫一号”运动的周期;根据地球自转周期和“天宫一号”运动的周期求出宇航员一天内看到日出的次数。
【解答】解:A、设“天宫一号”飞行器运动的周期为T0。“天宫一号”绕地球做匀速圆周运动,根据万有引力提供向心力,可得G=mr,则地球质量为M=,由于“天宫一号”运动的周期与地球自转周期T不等,不能地球质量不能表达为M=,故A错误;
B、“神州八号”飞船与“天宫一号”进行对接时,若“神州八号”飞船从高轨道加速,使得万有引力小于向心力,做离心运动,不能实现对接,因此,“神州八号”飞船需要从低轨道加速,使得万有引力小于向心力,做离心运动,实现对接,故B错误;
C、在地球表面上,根据万有引力等于重力,得G=m′g得GM=gR2,结合G=mr,得“天宫一号”飞行器运动的周期T0=2π,故C错误;
D、“天宫一号”在在一天内,转动的圈数N==,则天宫一号的航天员在一天内可以看到日出的次数是N=,故D正确。
故选:D。
【点评】解决本题的关键要掌握万有引力定律应用的两个重要理论:1、万有引力等于重力,2、万有引力提供向心力,并能灵活运用。
5.(4分)高台跳雪是冬奥会的比赛项目之一。如图所示,某高台跳雪运动员(可视为质点)从雪道末端先后以初速度之比v1:v2=3:4沿水平方向飞出,不计空气阻力,则运动员从飞出到落到雪坡上的整个过程中( )
A.运动员先后在空中飞行的时间相同
B.运动员先后落在雪坡上的速度方向不同
C.运动员先后落在雪坡上动量的变化量之比为3:4
D.运动员先后落在雪坡上动能的增加量之比为3:4
【分析】分析题干信息可知本题为斜面上的平抛运动
【解答】解:A、由平抛运动规律有x=v0t,,,代入数据解得
运动员飞行的时间t与v0成正比,所以运动员先后在空中飞行的时间不相同。故A错误;
B、由平抛运动推论有速度夹角的正切值是位移夹角正切值的2倍,落到雪坡上位移夹角相同,则速度的夹角也相同。故B错误;
C、由于运动员飞行的时间t与v0成正比t1:t2=3:4,运动员飞行过程,由动量定理有mgt=△p,故运动员先后落在雪坡上动量的变化量之比与时间成正比为3:4,故C正确;
D、运动员下落的高度为,由动能定理有mgh=△Ek,代入数据解得,运动员先后落在雪坡上动能的增加量与时间的平方成正比,动能的增加量之比为9:16,故D错误。
故选:C。
【点评】本题利用斜面上的平抛运动模型考察了平抛运动规律与动量定理应用,综合性较强,正确使用物理公式是本题的解题关键。
6.(4分)已知一个无限大的金属板与一个点电荷之间的空间电场分布与等量异种电荷之间的电场分布类似,即金属板表面各处的电场强度方向与板面垂直。如图所示,MN为无限大的不带电的金属平板,且与大地连接。现将一个电荷量为Q的正点电荷置于板的右侧,图中a、b、c、d是以正点电荷Q为圆心的圆上的四个点,四点的连线构成一内接正方形,其中ab连线与金属板垂直。则下列说法正确的是( )
A.b点电场强度与c点电场强度相同
B.a点电场强度与b点电场强度大小相等
C.a点电势等于d点电势
D.将一试探电荷从a点沿直线ad移到d点的过程中,试探电荷电势能始终保持不变
【分析】先画出电场线:电场线从正电荷出发,终止于负电荷,根据电场线的疏密分析电场强度的大小;根据对称性分析a点与d点的电势关系,根据电场力方向与位移方向的夹角分析电场力做功情况,来分析电势能的变化。
【解答】解:画出电场线如图所示:
A、根据对称性可知,b点电场强度与c点电场强度大小相等,方向不同,故A错误;
B、电场线密集的地方电场强度大,从图上可以看出a点电场强度大于b点电场强度,故B错误;
C、根据对称性并结合电场线的分布可知a点电势等于d点电势,故C正确;
D、由于试探电荷先靠近正电荷后远离正电荷,所以电场力在这个过程中做功,所以试探电荷电势能不是始终保持不变,故D错误;
故选:C。
【点评】本题涉及电场强度和电势高低的判断,电场强度是矢量,合成遵循平行四边形定则;电势是标量,合成遵循代数法则。
7.(4分)利用霍尔效应制作的霍尔元件,广泛应用于测量和自动控制等领域。如图是霍尔元件的工作原理示意图,磁感应强度B垂直于霍尔元件的工作面向下,通入图示方向的电流I,C、D两侧面会形成电势差UCD,下列说法中正确的是( )
A.电势差UCD仅与材料有关
B.若霍尔元件的载流子是自由电子,则电势差UCD>0
C.仅增大磁感应强度时,电势差UCD变大
D.在测定地球赤道上方的地磁场强弱时,元件的工作面应保持水平
【分析】在霍尔元件中,移动的是自由电子,根据左手定则判断出电子所受洛伦兹力方向,从而知道两侧面所带电荷的电性,即可知道C、D两侧面会形成电势差UCD的正负。CD间存在电势差,之间就存在电场,电子在电场力和洛伦兹力作用下处于平衡,根据平衡推导出电势差UCD与什么因素有关。
【解答】解:ABC、根据左手定则,电子向C侧面偏转,C表面带负电,D表面带正电,所以D表面的电势高,则UCD<0.CD间存在电势差,之间就存在电场,电子在电场力和洛伦兹力作用下处于平衡,设霍尔元件的长宽高分别为a、b、c,有q=qvB,I=nqvs=nqvbc,则U=.故A错误,B错误,C正确。
D、在测定地球赤道上方的地磁场强弱时,应将元件的工作面保持竖直,让磁场垂直通过。故D错误。
故选:C。
【点评】解决本题的关键知道霍尔元件中移动的是自由电子,以及自由电子在电场力和洛伦兹力作用下处于平衡。
8.(4分)半径为L的圆形边界内分布有垂直圆所在平面的磁场,垂直纸面向里的磁感应强度大小为2B,垂直纸面向外的磁感应强度大小为B,如图所示。AEO为八分之一圆导线框,其总电阻为R,以角速度ω绕O轴逆时针匀速转动,从图中所示位置开始计时,用i表示导线框中的感应电流(顺时针方向为正),线框中感应电流i随时间t变化图象可能是( )
A.
B.
C.
D.
【分析】根据法拉第电磁感应定律求解感应电动势大小,再根据闭合电路的欧姆定律求解感应电流大小,根据楞次定律判断感应电流方向。
【解答】解:在第一个T内,根据楞次定律可得电流方向为顺时针,感应电动势大小为:E=×2BL2ω+×BL2ω=×BL2ω,感应电流大小为:i===;
在第二个T内,感应电流为零;
在第三个T内,根据楞次定律可得电流方向为逆时针,感应电动势大小为:E=×2BL2ω+×BL2ω=×BL2ω,感应电流大小为:i===;
在第四个T内,感应电流为零;
在第五个T内,根据楞次定律可得电流方向为顺时针,感应电动势大小为E=BL2ω,感应电流大小为i==I0;
在第六个T内,感应电流为零;
在第七个T内,根据楞次定律可得电流方向为逆时针,根据楞次定律可得电流方向为逆时针,感应电动势大小为E=BL2ω,感应电流大小为i==I0;
在第八个T内,感应电流为零;
故B正确,ACD
错误。
故选:B。
【点评】对于电磁感应现象中的图象问题,磁场是根据楞次定律或右手定则判断电流方向,根据法拉第电磁感应定律和闭合电路的欧姆定律求解感应电流随时间变化关系,由此进行解答,这是电磁感应问题中常用的方法和思路。
9.(6分)A、B两物体在光滑水平面上沿同一直线运动,图示为A、B两物体发生碰撞前后的v﹣t图线,由图线数据及相关物理规律可以判断( )
A.A、B的质量比为3:2
B.A作用前后动量变化为﹣12kg?m/s
C.B作用前后动量变化为10kg?m/s
D.A、B作用前后总动能不变
【分析】从图中可以得出碰撞前后A、B速度大小,利用动量守恒定律公式,代入数据可以求出A、B质量之比,结合初末速度与质量比可以求证碰撞前后A、B动能是否变化
【解答】解:A、根据动量守恒定律:mA?vA1+mB?vB1=mA?vA2+mB?vB2
结合图像代入有mA?6m/s+mB?1m/s=mA?2m/s+mB?7m/s,得:mA:mB=3:2,故A正确;
BC、A的动量变化△p=pA2﹣pA1=mA?vA2﹣mA?vA1,由于A质量未知,故动量变化具体数值无法求出,故B错误,同理可知C选项错误;
D、作用前总动能:,作用后总动能:,由此可知作用前后A、B的总动能不变,D正确;
故选:AD。
【点评】本题考查动量守恒定律,要求学生具备从图像读取信息的能力,难度适中。
10.(6分)如图甲所示的传送带以恒定速率运动,皮带始终是绷紧的。将质量1kg的货物放在传送带上的A处,经过1.2s到达传送带的B端,用速度传感器测得货物与传送带的速度v随时间t变化的图象如图乙所示,重力加速度g取10m/s2,由v﹣t图线可知( )
A.A、B两点的距离为2.4m
B.货物与传送带的动摩擦因数为0.5
C.货物从A运动到B过程中,传送带对货物做功大小为12.8J
D.货物从A运动到B过程中,货物与传送带摩擦产生的热量为4.8J
【分析】货物在传送带上先做加速度较大的匀加速直线运动,然后做加速度较小的匀加速直线运动,根据速度﹣时间图线与时间轴围成的面积表示物块的位移,求出AB两点间的距离。由速度图象的斜率求出加速度,根据牛顿第二定律求动摩擦因数。根据动能定理求传送带对货物做功大小。根据货物与传送带间的相对位移求产生的热量。
【解答】解:A、根据v﹣t图象与时间轴围成的面积表示物块的位移,知0﹣1.2s内货物运动的位移为
x=(+×1)m=3.2m,则AB两点的距离为3.2m,故A错误;
B、由图象可以看出,货物在两段时间内均做匀加速直线运动,根据牛顿第二定律有:
0﹣0.2s内,有
mgsinθ+μmgcosθ=ma1
0.2﹣1.2s内,有
mgsinθ﹣μmgcosθ=ma2
由v﹣t图象的斜率表示加速度,可得两段的加速度分别为:a1=m/s2=10m/s2,a2=m/s2=2m/s2
解得:θ=37°,μ=0.5,故B正确;
C、设传送带对货物做的功为W,对整个过程,根据动能定理得:W+mgxsinθ=﹣0,由图知,v=4m/s,解得
W=﹣11.2J,故C错误;
D、由图判断知,传送带的速度为
v皮=2m/s。根据功能关系,知货物与传送带因摩擦产生的热量等于摩擦力乘以相对位移,货物受到的滑动摩擦力大小为
f=μmgcosθ=0.5×10×1×0.8N=4N
0﹣0.2s内,货物的位移为:x1=×2×0.2m=0.2m,皮带位移为:x皮1=v皮t1=2×0.2m=0.4m,两者间相对位移为:△x1=x皮1﹣x1=(0.4﹣0.2)m=0.2m
同理:0.2﹣1.2s内,货物的位移为:x2=×(2+4)×1m=3m,x皮2=v皮t2=2×1m=2m,两者间相对位移为:△x2=x2﹣x皮2=(3﹣2)m=1m
故两者之间相对路程为:△x=△x1+△x2=(1+0.2)m=1.2m
货物与传送带摩擦产生的热量为:Q=W=f△x=4×1.2J=4.8J,故D正确。
故选:BD。
【点评】本题一方面要分析货物的运动情况,由图象的斜率求两段过程的加速度,另方面结合牛顿第二定律分两个过程列式求解摩擦因数及斜面倾角。在求摩擦产生的热量时注意找两物体的相对位移。
11.(6分)如图所示,固定在竖直面内的光滑圆环半径为R,圆环上套有质量分别为m和2m的小球A、B(均可看作质点),且小球A、B用一长为2R的轻质细杆相连,在小球B从最高点由静止开始沿圆环下滑至最低点的过程中(已知重力加速度为g),下列说法正确的是( )
A.A球增加的机械能等于B球减少的机械能
B.A球增加的重力势能等于B球减少的重力势能
C.A球的最大速度为
D.细杆对A球做的功为mgR
【分析】本题中两个球的系统机械能守恒,根据机械能守恒定律列式求解即可.
【解答】解:A、B球运动到最低点,A球运动到最高点,两个球系统机械能守恒,故A球增加的机械能等于B球减少的机械能,故A正确;
B、A球重力势能增加mg?2R,B球重力势能减小2mg?2R,故B错误;
C、两个球系统机械能守恒,当B球运动到最低点时,速度最大,有
2mg?2R﹣mg?2R=(m+2m)v2
解得
v=
故C错误;
D、除重力外其余力做的功等于机械能的增加量,故细杆对A球做的功等于A球动能的增加量,有
W=+mg?2R==
故D正确;
故选:AD。
【点评】本题关键抓住AB系统机械能守恒,同时运用除重力外其余力做的功等于机械能的增加量列式求解.
12.(6分)如图所示,在xOy平面内有匀强电场,半径为R的圆周上有一粒子源P,以相同的速率v0在平行于圆周面内沿各个方向发射质量为m、带电量为+q的微粒,微粒可以到达圆周上任意一个位置。比较到达圆上各个位置的微粒,发现到达Q点的微粒的动能最小,从C点离开的微粒的机械能最大,已知∠BOP=30°,∠AOQ=37°,取重力加速度为g,取sin37°=0.6,cos37°=0.8,取最低点D所在水平面为零重力势能面,不计空气阻力及带电微粒间的相互作用。则( )
A.匀强电场的电场强度大小为,方向沿y轴负方向
B.匀强电场的电场强度大小为,方向沿x轴负方向
C.通过D点的微粒动能为mv02+(+)mgR
D.微粒从P点运动到Q点过程中电势能增加
【分析】根据机械能最大点确定电场强度的方向;根据动能定理及功能关系确定各点的动能;根据功能关系求解微粒从P点运动到Q点过程中电势能增加。
【解答】解:ABC、在C点微粒机械能最大,说明P到C电场力做功最大,由数学关系可知,过C点做圆的切线为电场的等势线,即电场力沿OC方向,因带电粒子带正电,场强方向沿OC方向,即沿x轴负方向;而在Q点,微粒动能最小,即重力与电场力的合力方向沿QO,则有:
Eqtan37°=mg
F合sin37°=mg
解得E==,F合==mg
从P到D根据动能定理可得:EkD﹣EkP=W合
则有EkD=+mgR(1+cos37°)+EqRsin30°=(+)mgR+,故BC正确、A错误;
D、微粒从P点运动到Q点过程中克服电场中做的功为WPQ=qER(cos37°﹣sin30°)=,所以电势能增加,故D正确。
故选:BCD。
【点评】解决这类带电粒子在电场中运动问题的该时间能够判断电场力方向,利用电场中有关规律求解;明确电场力做功与电势能和动能间的关系。
二、非选择题(共54分)
13.(6分)某实验小组的同学用如图所示的装置测量滑块与斜面间的动摩擦因数μ.每次滑块都从斜面上由静止开始下滑,测出滑块每次下滑时遮光板到光电门所在位置的距离L及相应遮光时间t的值。
(1)用游标卡尺测量遮光板的宽度d,如图乙所示,则d= 0.225 cm。
(2)为测出滑块与斜面间的动摩擦因数μ,本实验还需要测出或知道的物理量是 BC (填下列序号)。
A.滑块和遮光板的总质量m
B.斜面的倾角θ
C.当地的重力加速度g
(3)实验中测出了多组L和t的值,若要通过线性图象来处理数据求μ值,则应作出的图象为 B ;
A.t2﹣L图象
B.图象
D.L2﹣t图象
C.图象
【分析】(1)游标卡尺的读数等于主尺读数加上游标读数,不需估读。
(2)依据牛顿第二定律,结合运动学公式,及中时刻的瞬时速度等于这段时间内的平均速度,即可求解;
(3)依据的表达式,即可判定;
【解答】解:(1)游标的刻度是20,其精确度为0.05
mm,d=2mm+5×0.05
mm=2.25mm=0.225
cm;
(2)设斜面的倾角为θ,释放滑块时遮光条到光电门间的距离x,滑块经过光电门时的速度为v,物体在斜面上受到重力。
支持力和摩擦力的作用,沿斜面的方向:mgsinθ﹣μmgcosθ=ma,由导出公式2aL=v2﹣0,
由于遮光片经过光电门的时间比较小,所以可以用遮光片经过光电门的平均速度表示瞬时速度,即,
联立解得:,
从公式中可以看出,摩擦因数与斜面的倾角θ、遮光片的宽度d、重力加速度g、遮光条宽度d、遮光时间t以及释放滑块时遮光条到光电门间的距离L有关,
所以还需要测量的物理量为:斜面的倾角θ和释放滑块时遮光条到光电门间的距离x、当地的重力加速度g,故A错误,BC正确;
故选:BC
(3)实验中测出了多组L及t的值,则有:,
应作出的图象为图象;故ACD错误,B正确
故选:B
故答案为:(1)0.225;(2)BC;(3)B
【点评】考查牛顿第二定律与运动学公式的内容,掌握图象的斜率含义,注意理解表达式推导的方法。
14.(9分)某学习小组测绘一个标有“4V,2.4W”的小电风扇(线圈电阻恒定)的伏安特性曲线,电风扇两端的电压需要从零逐渐增加到4V,并便于操作,实验室备有下列器材:
A.电池组(电动势为4V,内阻约为1Ω)
B.被测小电风扇,电路符号“”
C.电压表V1(量程为0~6V,内阻约为4kΩ)
D.电压表V2(量程为0~15V,内阻约为8kΩ)
E.电流表A1(量程为0~0.6A,内阻约为0.2kΩ)
F.电流表A2(量程为0~3A,内阻约为0.05kΩ)
G.滑动变阻器R1(最大阻值为5Ω,额定电流为3A)
H.滑动变阻器R2(最大阻值为2000Ω,额定电流为3A)
I.开关和导线若干
(1)实验中所用的电压表应选 C (填“C”或“D”),电流表应选 E (填“E”或“F”),滑动变阻器应选 G (填“G”或“H”)。
(2)在图甲中所示方框内画出实验电路图。
(3)当电压表的示数大于0.5V时小电风扇才开始转动,小电风扇的伏安特性曲线如图乙所示,图中OA段是直线,AB段是曲线,A点的坐标值为(0.2A,0.5V),B点坐标值为(0.6A,4.0V),则小电风扇的电阻为 2.5 Ω,正常工作时的机械功率为 1.5 W。
【分析】(1)选择器材需安全、精确,根据电风扇的额定电流确定电流表的量程,通过电风扇电阻的大约值,从测量的误差和可操作性角度选择滑动变阻器;
(2)测量伏安特性电流、电压需从零开始测起,滑动变阻器需采用分压式接法,根据电风扇内阻的大小确定电流表的内外接;
(3)电压表读数小于0.5V时电风扇没启动。电能全部转化为内能,根据欧姆定律求出电风扇的电阻,正常工作时根据电流和内阻求出发热功率,根据输入功率,通过能量守恒求出机械功率。
【解答】解:(1)电风扇的额定电压U=4V,所以电压表选取C;
电风扇的额定电流I==A=0.6A,从读数误差的角度考虑,电流表选择E;
电风扇的电阻比较小,则滑动变阻器选择总电阻为5Ω的操作方便,即选择G;
(2)因为电压电流需从零开始测起,则滑动变阻器采用分压式接法,电风扇的电阻大约为:R==Ω≈6.67Ω,远小于电压表内阻,属于小电阻,电流表采用外接法。电路图如图所示;
(3)图中OA段是直线,由于电压表读数小于0.5V时电风扇没启动,根据欧姆定律得,RM==Ω=2.5Ω;
正常工作时电压为4V,根据图象知电流为0.6A,则电风扇发热功率P=I2RM=0.36×2.5W=0.9W,
则机械功率P′=UI﹣I2RM=(4×0.6﹣0.9)W=1.5W。
故答案为:(1)C;E;G;(2)如图所示;(3)2.5;1.5。
【点评】解决本题的关键掌握器材选取的原则,即安全,精确。以及知道滑动变阻器分压式和限流式接法的区别,电流表内外接的区别。知道有电动机存在的电路是非纯电阻电路,清楚电风扇没启动时电能全部转化为内能,正常工作时电能转化为内能和机械能。
15.(6分)如图所示为四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用。一架质量m=1kg的无人机,其动力系统所能提供的最大升力F=16N,无人机上升过程中最大速度为6m/s。若无人机从地面以最大升力竖直起飞,达到最大速度所用时间为3s,假设无人机竖直飞行时所受阻力大小不变。g取10m/s2,求:
(1)无人机在竖直上升过程中所受阻力Ff的大小;
(2)无人机从地面起飞竖直上升至离地面h=30m的高空所需的最短时间。
【分析】(1)根据匀变速运动的速度公式v=atF及牛顿第二定律F﹣Ff﹣mg=ma求解阻力;
(2)无人机先匀加速到速度达到最大值后再匀速上升至离地面h=30m的高空时所需的时间最短;
【解答】解:(1)无人机上升过程中最大速度为6m/s,且达到最大速度所用时间为3s,根据v=at,a===2m/s2,人机以最大升力起飞时的加速度:a═2
m/s2.由牛顿第二定律F﹣Ff﹣mg=ma,得Ff=4
N。
(2)无人机先匀加速到速度达到最大值后再匀速上升至离地面h=30m的高空时所需的时间最短,无人机达到最大速度上升的高度x===9m,需要的时间t1=3s;达到最大速度后以最大速度6m/s匀速上升,需要的时间==3.5s,故总时间t=t1+t2=6.5
s。
答:(1)无人机在竖直上升过程中所受阻力Ff的大小为4
N;
(2)无人机从地面起飞竖直上升至离地面h=30m的高空所需的最短时间为6.5s;
【点评】本题的关键是准确分析无人机的运动及受力状态,再结合匀变速直线的运动公式及牛顿第二定律求解。
16.(14分)如图,光滑水平面上静止质量m1=1.0kg、长L=0.3m的木板,木板右端有质量m2=1.0kg的小滑块,在滑块正上方的0点用长r=0.4m的轻质细绳悬挂质量m=0.5kg的小球。将小球向右上方拉至细绳与整直方向成θ=60°的位置由静止释放,小球摆到最低点与滑块发生正碰并被反弹,碰撞时间极短,碰撞前后瞬间细绳对小球的拉力减小了4.8N,最终小滑块恰好不会从木板上滑下。不计空气阻力、滑块、小球均可视为质点,重力加速度g取10m/s2.求:
(1)小球碰前、碰后瞬间的速度大小;
(2)小滑块与木板之间的动摩擦因数。
【分析】(1)根据机械能守恒定律求出小球下摆到最低点时的速度,根据碰撞前后细绳拉力减小了4.8N,分别列出碰撞前后向心力的表达式,即可求出碰撞后的速度大小;
(2)滑块在木板上滑动的过程,系统的合外力,则系统的动量守恒。利用动量守恒和能量守恒即可求出动摩擦因数。
【解答】解:(1)小球下摆过程,由机械能守恒定律得
mgr(1﹣cosθ)=
可得,小球碰前瞬间的速度大小
v==2m/s
小球与小滑块碰撞前、后瞬间,由向心力公式可得:
T﹣mg=m,T′﹣mg=m
由题意得:T﹣T′=4.8N
联立求得碰后瞬间小球的速度大小为
v′=0.4m/s
(2)小球与小滑块碰撞过程,取向左为正方向,由动量守恒定律得:
mv=﹣mv′+m2v1。
解得:v1=1.2m/s
小滑块在木板上滑动过程中,由动量守恒定律得:
m2v1=(m1+m2)v2
解得:v2=0.6m/s
由能量守恒可得:μm2gL=m2v12﹣(m1+m2)v22
解得小滑块与木板之间的动摩擦因数
μ=0.12
答:
(1)小球碰前、碰后瞬间的速度大小分别是2m/s,0.4m/s。
(2)小滑块与木板之间的动摩擦因数是0.12。
【点评】本题考查了动量守恒定律、能量守恒定律、机械能守恒定律的综合运用,知道小球和小滑块碰撞的瞬间,系统动量守恒;小滑块在木板上运动的过程中,系统动量守恒,能量也守恒。
17.(19分)如图所示,在坐标系xOy的第一象限内有方向竖直向上的匀强电场,第二象限内有磁感应强度大小为B1(未知)、方向垂直于纸面向里的匀强磁场,第三、四象限内有磁感应强度大小为B2(未知)、方向垂直于纸面向里的匀强磁场,一带电荷量为q、质量为m的带负电的粒子,从x轴上的P点(﹣L,0),沿与x轴负方向成37°角的方向向上射出,射出时的初速度大小为v0,经磁场偏转后,垂直通过y轴,粒子运动过程中第一次通过x轴时,速度方向与x轴的正方向刚好成37°角,又经过一段时间刚好从P点第二次通过x轴.不计粒子的重力.求:(sin37°=0.6,cos37°=0.8)
(1)磁感应强度B1的大小及粒子第一次通过y轴的位置;
(2)电场强度E及磁感应强度B2的大小;
(3)粒子从P点出发再回到P点所用的时间.
【分析】(1)作出粒子整个运动过程轨迹,根据几何关系求解粒子做圆周运动的半径,根据洛伦兹力提供向心力求解粒子通过y轴的位置坐标;
(2)粒子在电场中做类平抛运动,根据类平抛运动和速度分解求解粒子通过x轴的速度,根据几何关系可知,粒子在三、四象限内做圆周运动的半径,再根据洛伦兹力提供向心力求解磁感应强度;
(3)分别求出粒子在第二象限的运动时间、在电场中运动时间、在第三、四象限中运动时间,即可得到从P点出发到再回到P点经过的时间.
【解答】解:(1)粒子经过磁场偏转,垂直通过y轴,因此粒子在第二象限的磁场中做圆周运动的圆心在y轴上,作出粒子整个运动过程轨迹如图所示,
根据几何关系可知,粒子做圆周运动的半径为:R1==,
根据qv0B1=m解得:B1=;
粒子第一次通过y轴的位置为:y=R1+R1cos37°=3L,
因此通过y轴的位置坐标为(0,3L);
(2)粒子在电场中做类平抛运动,第一次通过x轴时,速度方向与x轴正方向夹角为37°,
则粒子通过x轴时,在电场中沿x轴方向的位移为:x=v0t1,
y方向的位移为:y=,
又tan37°=,qE=ma,
解得:x=8L,E=;
粒子通过x轴的速度为:v1==,
根据几何关系可知,粒子在三、四象限内做圆周运动的半径为:
R2==7.5L,
根据qv1B2=m解得:B2=;
(3)粒子在第二象限的运动周期为:T1=,
在第二象限的运动时间为:t0=,
在电场中运动时间为:t1=,
在第三、四象限中运动周期为:T2=,
在第三、四象限中运动时间为:t2=,
因此从P点出发到再回到P点经过的时间为:t=t0+t1+t2=().
答:(1)磁感应强度B1的大小及粒子第一次通过y轴的位置为(0,3L);
(2)电场强度E及磁感应强度B2的大小为;
(3)粒子从P点出发再回到P点所用的时间为().
【点评】对于带电粒子在磁场中的运动情况分析,一般是确定圆心位置,根据几何关系求半径,结合洛伦兹力提供向心力求解未知量;根据周期公式结合轨迹对应的圆心角求时间;对于带电粒子在电场中运动时,一般是按类平抛运动的知识进行解答.
一、选择题(共56分)本卷共12小题,1-8题为单选,每题4分,不选或错选的得0分;9-12题为多选,每题6分,全选对的得6分,选对但不全得3分,有选错或不答的得0分。将你的答案填写在“答题纸”对应的题号处
1.随着科技的不断发展,无线充电已经进入人们的视线。小到手表、手机,大到电脑、电动汽车的充电,都已经实现了从理论研发到实际应用的转化。下图给出了某品牌的无线充电手机利用电磁感应方式无线充电的原理图。关于电线充电,下列说法正确的是( )
A.无线充电时手机接收线圈部分的工作原理是“电流的磁效应”
B.只有将充电底座接到直流电源上才能对手机进行充电
C.接收线圈中交变电流的频率与发射线圈中交变电流的频率相同
D.只要有无线充电底座,所有手机都可以进行无线充电
2.如图所示,质量为m的小球用细线拴住放在光滑斜面上,斜面足够长,倾角为α的斜面体置于光滑水平面上,用水平力F推斜面体使斜面体缓慢地向左移动,小球沿斜面缓慢升高。当线拉力最小时,推力F等于( )
A.mgsinα
B.
C.mgsin2α
D.
3.如图所示,质量为m的物体静止在地面上,物体上面连着一个轻弹簧,用手拉住弹簧上端上移H,将物体缓缓提高h,拉力F做功WF,不计弹簧的质量,则下列说法正确的是( )
A.重力做功﹣mgh,重力势能减少mgh
B.弹力做功﹣WF,弹性势能增加WF
C.重力势能增加mgh,弹性势能增加FH
D.重力势能增加mgh,弹性势能增加WF﹣mgh
4.2018年4月2日,中国首个空间实验室“天宫一号”坠入大气层焚毁。天宫一号是中国首个“目标飞行器”,其主要目的在于和神舟飞船(称“追踪飞行器”)配合完成交会对接飞行测试,为建设空间站积累经验。其在轨工作1630天,失联759天,在地球引力下轨道高度不断衰减,最终于4月2日早晨8点15分坠入大气层焚毁。据报道,该次坠落没有造成任何危险。天宫一号空间实验室于2011年9月29日在酒泉发射升空,设计寿命两年,轨道平均高度约为350km。作为中国空间站的前身,在役期间,天宫一号先后与神舟八号、九号、十号飞船配合完成六次交会对接任务,共计接待6名航天员,完成多项科学实验。设“天宫一号”飞行器的轨道半径为r,地球表面重力加速度为g,地球半径为R,地球自转周期为T,对于“天宫一号”在服役运行过程中,下列说法正确的是( )
A.根据题中数据,可求出地球的质量,地球质量可表达为M=
B.“神州八号”飞船与“天宫一号”进行对接时,“神州八号”飞船需要从高轨道加速
C.“天宫一号”飞行器运动的周期是T0=2π
D.“天宫一号”的航天员在一天内可以看到日出的次数是N=
5.高台跳雪是冬奥会的比赛项目之一。如图所示,某高台跳雪运动员(可视为质点)从雪道末端先后以初速度之比v1:v2=3:4沿水平方向飞出,不计空气阻力,则运动员从飞出到落到雪坡上的整个过程中( )
A.运动员先后在空中飞行的时间相同
B.运动员先后落在雪坡上的速度方向不同
C.运动员先后落在雪坡上动量的变化量之比为3:4
D.运动员先后落在雪坡上动能的增加量之比为3:4
6.已知一个无限大的金属板与一个点电荷之间的空间电场分布与等量异种电荷之间的电场分布类似,即金属板表面各处的电场强度方向与板面垂直。如图所示,MN为无限大的不带电的金属平板,且与大地连接。现将一个电荷量为Q的正点电荷置于板的右侧,图中a、b、c、d是以正点电荷Q为圆心的圆上的四个点,四点的连线构成一内接正方形,其中ab连线与金属板垂直。则下列说法正确的是( )
A.b点电场强度与c点电场强度相同
B.a点电场强度与b点电场强度大小相等
C.a点电势等于d点电势
D.将一试探电荷从a点沿直线ad移到d点的过程中,试探电荷电势能始终保持不变
7.利用霍尔效应制作的霍尔元件,广泛应用于测量和自动控制等领域。如图是霍尔元件的工作原理示意图,磁感应强度B垂直于霍尔元件的工作面向下,通入图示方向的电流I,C、D两侧面会形成电势差UCD,下列说法中正确的是( )
A.电势差UCD仅与材料有关
B.若霍尔元件的载流子是自由电子,则电势差UCD>0
C.仅增大磁感应强度时,电势差UCD变大
D.在测定地球赤道上方的地磁场强弱时,元件的工作面应保持水平
8.半径为L的圆形边界内分布有垂直圆所在平面的磁场,垂直纸面向里的磁感应强度大小为2B,垂直纸面向外的磁感应强度大小为B,如图所示。AEO为八分之一圆导线框,其总电阻为R,以角速度ω绕O轴逆时针匀速转动,从图中所示位置开始计时,用i表示导线框中的感应电流(顺时针方向为正),线框中感应电流i随时间t变化图象可能是( )
A.
B.
C.
D.
9.A、B两物体在光滑水平面上沿同一直线运动,图示为A、B两物体发生碰撞前后的v﹣t图线,由图线数据及相关物理规律可以判断( )
A.A、B的质量比为3:2
B.A作用前后动量变化为﹣12kg?m/s
C.B作用前后动量变化为10kg?m/s
D.A、B作用前后总动能不变
10.如图甲所示的传送带以恒定速率运动,皮带始终是绷紧的。将质量1kg的货物放在传送带上的A处,经过1.2s到达传送带的B端,用速度传感器测得货物与传送带的速度v随时间t变化的图象如图乙所示,重力加速度g取10m/s2,由v﹣t图线可知( )
A.A、B两点的距离为2.4m
B.货物与传送带的动摩擦因数为0.5
C.货物从A运动到B过程中,传送带对货物做功大小为12.8J
D.货物从A运动到B过程中,货物与传送带摩擦产生的热量为4.8J
11.如图所示,固定在竖直面内的光滑圆环半径为R,圆环上套有质量分别为m和2m的小球A、B(均可看作质点),且小球A、B用一长为2R的轻质细杆相连,在小球B从最高点由静止开始沿圆环下滑至最低点的过程中(已知重力加速度为g),下列说法正确的是( )
A.A球增加的机械能等于B球减少的机械能
B.A球增加的重力势能等于B球减少的重力势能
C.A球的最大速度为
D.细杆对A球做的功为mgR
12.如图所示,在xOy平面内有匀强电场,半径为R的圆周上有一粒子源P,以相同的速率v0在平行于圆周面内沿各个方向发射质量为m、带电量为+q的微粒,微粒可以到达圆周上任意一个位置。比较到达圆上各个位置的微粒,发现到达Q点的微粒的动能最小,从C点离开的微粒的机械能最大,已知∠BOP=30°,∠AOQ=37°,取重力加速度为g,取sin37°=0.6,cos37°=0.8,取最低点D所在水平面为零重力势能面,不计空气阻力及带电微粒间的相互作用。则( )
A.匀强电场的电场强度大小为,方向沿y轴负方向
B.匀强电场的电场强度大小为,方向沿x轴负方向
C.通过D点的微粒动能为mv02+(+)mgR
D.微粒从P点运动到Q点过程中电势能增加
二、非选择题(共54分)
13.(6分)某实验小组的同学用如图所示的装置测量滑块与斜面间的动摩擦因数μ.每次滑块都从斜面上由静止开始下滑,测出滑块每次下滑时遮光板到光电门所在位置的距离L及相应遮光时间t的值。
(1)用游标卡尺测量遮光板的宽度d,如图乙所示,则d=
cm。
(2)为测出滑块与斜面间的动摩擦因数μ,本实验还需要测出或知道的物理量是
(填下列序号)。
A.滑块和遮光板的总质量m
B.斜面的倾角θ
C.当地的重力加速度g
(3)实验中测出了多组L和t的值,若要通过线性图象来处理数据求μ值,则应作出的图象为
;
A.t2﹣L图象
B.图象
D.L2﹣t图象
C.图象
14.(9分)某学习小组测绘一个标有“4V,2.4W”的小电风扇(线圈电阻恒定)的伏安特性曲线,电风扇两端的电压需要从零逐渐增加到4V,并便于操作,实验室备有下列器材:
A.电池组(电动势为4V,内阻约为1Ω)
B.被测小电风扇,电路符号“”
C.电压表V1(量程为0~6V,内阻约为4kΩ)
D.电压表V2(量程为0~15V,内阻约为8kΩ)
E.电流表A1(量程为0~0.6A,内阻约为0.2kΩ)
F.电流表A2(量程为0~3A,内阻约为0.05kΩ)
G.滑动变阻器R1(最大阻值为5Ω,额定电流为3A)
H.滑动变阻器R2(最大阻值为2000Ω,额定电流为3A)
I.开关和导线若干
(1)实验中所用的电压表应选
(填“C”或“D”),电流表应选
(填“E”或“F”),滑动变阻器应选
(填“G”或“H”)。
(2)在图甲中所示方框内画出实验电路图。
(3)当电压表的示数大于0.5V时小电风扇才开始转动,小电风扇的伏安特性曲线如图乙所示,图中OA段是直线,AB段是曲线,A点的坐标值为(0.2A,0.5V),B点坐标值为(0.6A,4.0V),则小电风扇的电阻为
Ω,正常工作时的机械功率为
W。
15.(6分)如图所示为四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用。一架质量m=1kg的无人机,其动力系统所能提供的最大升力F=16N,无人机上升过程中最大速度为6m/s。若无人机从地面以最大升力竖直起飞,达到最大速度所用时间为3s,假设无人机竖直飞行时所受阻力大小不变。g取10m/s2,求:
(1)无人机在竖直上升过程中所受阻力Ff的大小;
(2)无人机从地面起飞竖直上升至离地面h=30m的高空所需的最短时间。
16.(14分)如图,光滑水平面上静止质量m1=1.0kg、长L=0.3m的木板,木板右端有质量m2=1.0kg的小滑块,在滑块正上方的0点用长r=0.4m的轻质细绳悬挂质量m=0.5kg的小球。将小球向右上方拉至细绳与整直方向成θ=60°的位置由静止释放,小球摆到最低点与滑块发生正碰并被反弹,碰撞时间极短,碰撞前后瞬间细绳对小球的拉力减小了4.8N,最终小滑块恰好不会从木板上滑下。不计空气阻力、滑块、小球均可视为质点,重力加速度g取10m/s2.求:
(1)小球碰前、碰后瞬间的速度大小;
(2)小滑块与木板之间的动摩擦因数。
17.(19分)如图所示,在坐标系xOy的第一象限内有方向竖直向上的匀强电场,第二象限内有磁感应强度大小为B1(未知)、方向垂直于纸面向里的匀强磁场,第三、四象限内有磁感应强度大小为B2(未知)、方向垂直于纸面向里的匀强磁场,一带电荷量为q、质量为m的带负电的粒子,从x轴上的P点(﹣L,0),沿与x轴负方向成37°角的方向向上射出,射出时的初速度大小为v0,经磁场偏转后,垂直通过y轴,粒子运动过程中第一次通过x轴时,速度方向与x轴的正方向刚好成37°角,又经过一段时间刚好从P点第二次通过x轴.不计粒子的重力.求:(sin37°=0.6,cos37°=0.8)
(1)磁感应强度B1的大小及粒子第一次通过y轴的位置;
(2)电场强度E及磁感应强度B2的大小;
(3)粒子从P点出发再回到P点所用的时间.
2021年吉林省吉林市高考物理二调试卷
参考答案与试题解析
一、选择题(共56分)本卷共12小题,1-8题为单选,每题4分,不选或错选的得0分;9-12题为多选,每题6分,全选对的得6分,选对但不全得3分,有选错或不答的得0分。将你的答案填写在“答题纸”对应的题号处
1.(4分)随着科技的不断发展,无线充电已经进入人们的视线。小到手表、手机,大到电脑、电动汽车的充电,都已经实现了从理论研发到实际应用的转化。下图给出了某品牌的无线充电手机利用电磁感应方式无线充电的原理图。关于电线充电,下列说法正确的是( )
A.无线充电时手机接收线圈部分的工作原理是“电流的磁效应”
B.只有将充电底座接到直流电源上才能对手机进行充电
C.接收线圈中交变电流的频率与发射线圈中交变电流的频率相同
D.只要有无线充电底座,所有手机都可以进行无线充电
【分析】根据电磁感应现象的原理,结合感应电动势产生的条件,即可一一求解。
【解答】解:A、无线充电时手机接收线圈部分的工作原理是电磁感应现象,不是“电流的磁效应”现象,故A错误;
B、当充电设备通以恒定直流,无线充电设备不会产生交变磁场,那么不能够正常使用,故B错误;
C、接收线圈中交变电流的频率与发射线圈中交变电流的频率相同,故C正确;
D、被充电手机内部,应该有一类似金属线圈的部件,与手机电池相连,当有交变磁场时,则出现感应电动势,那么普通手机不能够利用无线充电设备进行充电,故D错误;
故选:C。
【点评】考查充电手机的工作原理,理解电磁感应现象的运用,及产生感应电动势的条件,注意涡流的防止与应用。
2.(4分)如图所示,质量为m的小球用细线拴住放在光滑斜面上,斜面足够长,倾角为α的斜面体置于光滑水平面上,用水平力F推斜面体使斜面体缓慢地向左移动,小球沿斜面缓慢升高。当线拉力最小时,推力F等于( )
A.mgsinα
B.
C.mgsin2α
D.
【分析】先以小球为研究对象.斜面体缓慢地向左移动过程中,小球缓慢上升,合力为零.运用作图法得出线的拉力取得最小时,线与水平方向的夹角,并求出拉力的最小值,再对整体进行研究,由平衡条件求出F.
【解答】解:以小球为研究对象。小球受到重力mg、斜面的支持力N和细线的拉力T,在小球缓慢上升过程中,小球的合力为零,则N与T的合力与重力大小相等、方向相反,根据平行四边形定则作出三个位置力的合成图如图,则得当T与N垂直,即线与斜面平行时T最小,则得线的拉力最小值为
Tmin=Tmin=mgsinα。
再对小球和斜面体组成的整体研究,根据平衡条件得:
F=Tmincosα=(mgsinα)cosα=。
故选:D。
【点评】本题是动态平衡问题,关键要作出力图,运用图解法得到拉力最小的条件和最小值,
3.(4分)如图所示,质量为m的物体静止在地面上,物体上面连着一个轻弹簧,用手拉住弹簧上端上移H,将物体缓缓提高h,拉力F做功WF,不计弹簧的质量,则下列说法正确的是( )
A.重力做功﹣mgh,重力势能减少mgh
B.弹力做功﹣WF,弹性势能增加WF
C.重力势能增加mgh,弹性势能增加FH
D.重力势能增加mgh,弹性势能增加WF﹣mgh
【分析】重力势能的变化量等于负的重力所做的功,物体缓缓提高说明速度不变,拉力F做的功等于物体重力势能的变化量与弹簧弹性势能增加量之和.
【解答】解:重力势能的变化量等于负的重力所做的功,即
△EP=﹣WG=﹣(﹣mgh)=mgh
物体缓缓提高说明速度不变,所以物体动能不发生变化,
△E弹=WF+WG=WF﹣mgh
故选:D。
【点评】本题主要考查了重力势能的变化量与重力做功的关系以及能量转化关系,难度不大,属于基础题.
4.(4分)2018年4月2日,中国首个空间实验室“天宫一号”坠入大气层焚毁。天宫一号是中国首个“目标飞行器”,其主要目的在于和神舟飞船(称“追踪飞行器”)配合完成交会对接飞行测试,为建设空间站积累经验。其在轨工作1630天,失联759天,在地球引力下轨道高度不断衰减,最终于4月2日早晨8点15分坠入大气层焚毁。据报道,该次坠落没有造成任何危险。天宫一号空间实验室于2011年9月29日在酒泉发射升空,设计寿命两年,轨道平均高度约为350km。作为中国空间站的前身,在役期间,天宫一号先后与神舟八号、九号、十号飞船配合完成六次交会对接任务,共计接待6名航天员,完成多项科学实验。设“天宫一号”飞行器的轨道半径为r,地球表面重力加速度为g,地球半径为R,地球自转周期为T,对于“天宫一号”在服役运行过程中,下列说法正确的是( )
A.根据题中数据,可求出地球的质量,地球质量可表达为M=
B.“神州八号”飞船与“天宫一号”进行对接时,“神州八号”飞船需要从高轨道加速
C.“天宫一号”飞行器运动的周期是T0=2π
D.“天宫一号”的航天员在一天内可以看到日出的次数是N=
【分析】根据万有引力等于重力,可求出地球的质量,也可以根据万有引力提供向心力,来求地球的质量;飞船加速时将做离心运动;“天宫一号”绕地球做匀速圆周运动,根据万有引力提供向心力,可求出“天宫一号”运动的周期;根据地球自转周期和“天宫一号”运动的周期求出宇航员一天内看到日出的次数。
【解答】解:A、设“天宫一号”飞行器运动的周期为T0。“天宫一号”绕地球做匀速圆周运动,根据万有引力提供向心力,可得G=mr,则地球质量为M=,由于“天宫一号”运动的周期与地球自转周期T不等,不能地球质量不能表达为M=,故A错误;
B、“神州八号”飞船与“天宫一号”进行对接时,若“神州八号”飞船从高轨道加速,使得万有引力小于向心力,做离心运动,不能实现对接,因此,“神州八号”飞船需要从低轨道加速,使得万有引力小于向心力,做离心运动,实现对接,故B错误;
C、在地球表面上,根据万有引力等于重力,得G=m′g得GM=gR2,结合G=mr,得“天宫一号”飞行器运动的周期T0=2π,故C错误;
D、“天宫一号”在在一天内,转动的圈数N==,则天宫一号的航天员在一天内可以看到日出的次数是N=,故D正确。
故选:D。
【点评】解决本题的关键要掌握万有引力定律应用的两个重要理论:1、万有引力等于重力,2、万有引力提供向心力,并能灵活运用。
5.(4分)高台跳雪是冬奥会的比赛项目之一。如图所示,某高台跳雪运动员(可视为质点)从雪道末端先后以初速度之比v1:v2=3:4沿水平方向飞出,不计空气阻力,则运动员从飞出到落到雪坡上的整个过程中( )
A.运动员先后在空中飞行的时间相同
B.运动员先后落在雪坡上的速度方向不同
C.运动员先后落在雪坡上动量的变化量之比为3:4
D.运动员先后落在雪坡上动能的增加量之比为3:4
【分析】分析题干信息可知本题为斜面上的平抛运动
【解答】解:A、由平抛运动规律有x=v0t,,,代入数据解得
运动员飞行的时间t与v0成正比,所以运动员先后在空中飞行的时间不相同。故A错误;
B、由平抛运动推论有速度夹角的正切值是位移夹角正切值的2倍,落到雪坡上位移夹角相同,则速度的夹角也相同。故B错误;
C、由于运动员飞行的时间t与v0成正比t1:t2=3:4,运动员飞行过程,由动量定理有mgt=△p,故运动员先后落在雪坡上动量的变化量之比与时间成正比为3:4,故C正确;
D、运动员下落的高度为,由动能定理有mgh=△Ek,代入数据解得,运动员先后落在雪坡上动能的增加量与时间的平方成正比,动能的增加量之比为9:16,故D错误。
故选:C。
【点评】本题利用斜面上的平抛运动模型考察了平抛运动规律与动量定理应用,综合性较强,正确使用物理公式是本题的解题关键。
6.(4分)已知一个无限大的金属板与一个点电荷之间的空间电场分布与等量异种电荷之间的电场分布类似,即金属板表面各处的电场强度方向与板面垂直。如图所示,MN为无限大的不带电的金属平板,且与大地连接。现将一个电荷量为Q的正点电荷置于板的右侧,图中a、b、c、d是以正点电荷Q为圆心的圆上的四个点,四点的连线构成一内接正方形,其中ab连线与金属板垂直。则下列说法正确的是( )
A.b点电场强度与c点电场强度相同
B.a点电场强度与b点电场强度大小相等
C.a点电势等于d点电势
D.将一试探电荷从a点沿直线ad移到d点的过程中,试探电荷电势能始终保持不变
【分析】先画出电场线:电场线从正电荷出发,终止于负电荷,根据电场线的疏密分析电场强度的大小;根据对称性分析a点与d点的电势关系,根据电场力方向与位移方向的夹角分析电场力做功情况,来分析电势能的变化。
【解答】解:画出电场线如图所示:
A、根据对称性可知,b点电场强度与c点电场强度大小相等,方向不同,故A错误;
B、电场线密集的地方电场强度大,从图上可以看出a点电场强度大于b点电场强度,故B错误;
C、根据对称性并结合电场线的分布可知a点电势等于d点电势,故C正确;
D、由于试探电荷先靠近正电荷后远离正电荷,所以电场力在这个过程中做功,所以试探电荷电势能不是始终保持不变,故D错误;
故选:C。
【点评】本题涉及电场强度和电势高低的判断,电场强度是矢量,合成遵循平行四边形定则;电势是标量,合成遵循代数法则。
7.(4分)利用霍尔效应制作的霍尔元件,广泛应用于测量和自动控制等领域。如图是霍尔元件的工作原理示意图,磁感应强度B垂直于霍尔元件的工作面向下,通入图示方向的电流I,C、D两侧面会形成电势差UCD,下列说法中正确的是( )
A.电势差UCD仅与材料有关
B.若霍尔元件的载流子是自由电子,则电势差UCD>0
C.仅增大磁感应强度时,电势差UCD变大
D.在测定地球赤道上方的地磁场强弱时,元件的工作面应保持水平
【分析】在霍尔元件中,移动的是自由电子,根据左手定则判断出电子所受洛伦兹力方向,从而知道两侧面所带电荷的电性,即可知道C、D两侧面会形成电势差UCD的正负。CD间存在电势差,之间就存在电场,电子在电场力和洛伦兹力作用下处于平衡,根据平衡推导出电势差UCD与什么因素有关。
【解答】解:ABC、根据左手定则,电子向C侧面偏转,C表面带负电,D表面带正电,所以D表面的电势高,则UCD<0.CD间存在电势差,之间就存在电场,电子在电场力和洛伦兹力作用下处于平衡,设霍尔元件的长宽高分别为a、b、c,有q=qvB,I=nqvs=nqvbc,则U=.故A错误,B错误,C正确。
D、在测定地球赤道上方的地磁场强弱时,应将元件的工作面保持竖直,让磁场垂直通过。故D错误。
故选:C。
【点评】解决本题的关键知道霍尔元件中移动的是自由电子,以及自由电子在电场力和洛伦兹力作用下处于平衡。
8.(4分)半径为L的圆形边界内分布有垂直圆所在平面的磁场,垂直纸面向里的磁感应强度大小为2B,垂直纸面向外的磁感应强度大小为B,如图所示。AEO为八分之一圆导线框,其总电阻为R,以角速度ω绕O轴逆时针匀速转动,从图中所示位置开始计时,用i表示导线框中的感应电流(顺时针方向为正),线框中感应电流i随时间t变化图象可能是( )
A.
B.
C.
D.
【分析】根据法拉第电磁感应定律求解感应电动势大小,再根据闭合电路的欧姆定律求解感应电流大小,根据楞次定律判断感应电流方向。
【解答】解:在第一个T内,根据楞次定律可得电流方向为顺时针,感应电动势大小为:E=×2BL2ω+×BL2ω=×BL2ω,感应电流大小为:i===;
在第二个T内,感应电流为零;
在第三个T内,根据楞次定律可得电流方向为逆时针,感应电动势大小为:E=×2BL2ω+×BL2ω=×BL2ω,感应电流大小为:i===;
在第四个T内,感应电流为零;
在第五个T内,根据楞次定律可得电流方向为顺时针,感应电动势大小为E=BL2ω,感应电流大小为i==I0;
在第六个T内,感应电流为零;
在第七个T内,根据楞次定律可得电流方向为逆时针,根据楞次定律可得电流方向为逆时针,感应电动势大小为E=BL2ω,感应电流大小为i==I0;
在第八个T内,感应电流为零;
故B正确,ACD
错误。
故选:B。
【点评】对于电磁感应现象中的图象问题,磁场是根据楞次定律或右手定则判断电流方向,根据法拉第电磁感应定律和闭合电路的欧姆定律求解感应电流随时间变化关系,由此进行解答,这是电磁感应问题中常用的方法和思路。
9.(6分)A、B两物体在光滑水平面上沿同一直线运动,图示为A、B两物体发生碰撞前后的v﹣t图线,由图线数据及相关物理规律可以判断( )
A.A、B的质量比为3:2
B.A作用前后动量变化为﹣12kg?m/s
C.B作用前后动量变化为10kg?m/s
D.A、B作用前后总动能不变
【分析】从图中可以得出碰撞前后A、B速度大小,利用动量守恒定律公式,代入数据可以求出A、B质量之比,结合初末速度与质量比可以求证碰撞前后A、B动能是否变化
【解答】解:A、根据动量守恒定律:mA?vA1+mB?vB1=mA?vA2+mB?vB2
结合图像代入有mA?6m/s+mB?1m/s=mA?2m/s+mB?7m/s,得:mA:mB=3:2,故A正确;
BC、A的动量变化△p=pA2﹣pA1=mA?vA2﹣mA?vA1,由于A质量未知,故动量变化具体数值无法求出,故B错误,同理可知C选项错误;
D、作用前总动能:,作用后总动能:,由此可知作用前后A、B的总动能不变,D正确;
故选:AD。
【点评】本题考查动量守恒定律,要求学生具备从图像读取信息的能力,难度适中。
10.(6分)如图甲所示的传送带以恒定速率运动,皮带始终是绷紧的。将质量1kg的货物放在传送带上的A处,经过1.2s到达传送带的B端,用速度传感器测得货物与传送带的速度v随时间t变化的图象如图乙所示,重力加速度g取10m/s2,由v﹣t图线可知( )
A.A、B两点的距离为2.4m
B.货物与传送带的动摩擦因数为0.5
C.货物从A运动到B过程中,传送带对货物做功大小为12.8J
D.货物从A运动到B过程中,货物与传送带摩擦产生的热量为4.8J
【分析】货物在传送带上先做加速度较大的匀加速直线运动,然后做加速度较小的匀加速直线运动,根据速度﹣时间图线与时间轴围成的面积表示物块的位移,求出AB两点间的距离。由速度图象的斜率求出加速度,根据牛顿第二定律求动摩擦因数。根据动能定理求传送带对货物做功大小。根据货物与传送带间的相对位移求产生的热量。
【解答】解:A、根据v﹣t图象与时间轴围成的面积表示物块的位移,知0﹣1.2s内货物运动的位移为
x=(+×1)m=3.2m,则AB两点的距离为3.2m,故A错误;
B、由图象可以看出,货物在两段时间内均做匀加速直线运动,根据牛顿第二定律有:
0﹣0.2s内,有
mgsinθ+μmgcosθ=ma1
0.2﹣1.2s内,有
mgsinθ﹣μmgcosθ=ma2
由v﹣t图象的斜率表示加速度,可得两段的加速度分别为:a1=m/s2=10m/s2,a2=m/s2=2m/s2
解得:θ=37°,μ=0.5,故B正确;
C、设传送带对货物做的功为W,对整个过程,根据动能定理得:W+mgxsinθ=﹣0,由图知,v=4m/s,解得
W=﹣11.2J,故C错误;
D、由图判断知,传送带的速度为
v皮=2m/s。根据功能关系,知货物与传送带因摩擦产生的热量等于摩擦力乘以相对位移,货物受到的滑动摩擦力大小为
f=μmgcosθ=0.5×10×1×0.8N=4N
0﹣0.2s内,货物的位移为:x1=×2×0.2m=0.2m,皮带位移为:x皮1=v皮t1=2×0.2m=0.4m,两者间相对位移为:△x1=x皮1﹣x1=(0.4﹣0.2)m=0.2m
同理:0.2﹣1.2s内,货物的位移为:x2=×(2+4)×1m=3m,x皮2=v皮t2=2×1m=2m,两者间相对位移为:△x2=x2﹣x皮2=(3﹣2)m=1m
故两者之间相对路程为:△x=△x1+△x2=(1+0.2)m=1.2m
货物与传送带摩擦产生的热量为:Q=W=f△x=4×1.2J=4.8J,故D正确。
故选:BD。
【点评】本题一方面要分析货物的运动情况,由图象的斜率求两段过程的加速度,另方面结合牛顿第二定律分两个过程列式求解摩擦因数及斜面倾角。在求摩擦产生的热量时注意找两物体的相对位移。
11.(6分)如图所示,固定在竖直面内的光滑圆环半径为R,圆环上套有质量分别为m和2m的小球A、B(均可看作质点),且小球A、B用一长为2R的轻质细杆相连,在小球B从最高点由静止开始沿圆环下滑至最低点的过程中(已知重力加速度为g),下列说法正确的是( )
A.A球增加的机械能等于B球减少的机械能
B.A球增加的重力势能等于B球减少的重力势能
C.A球的最大速度为
D.细杆对A球做的功为mgR
【分析】本题中两个球的系统机械能守恒,根据机械能守恒定律列式求解即可.
【解答】解:A、B球运动到最低点,A球运动到最高点,两个球系统机械能守恒,故A球增加的机械能等于B球减少的机械能,故A正确;
B、A球重力势能增加mg?2R,B球重力势能减小2mg?2R,故B错误;
C、两个球系统机械能守恒,当B球运动到最低点时,速度最大,有
2mg?2R﹣mg?2R=(m+2m)v2
解得
v=
故C错误;
D、除重力外其余力做的功等于机械能的增加量,故细杆对A球做的功等于A球动能的增加量,有
W=+mg?2R==
故D正确;
故选:AD。
【点评】本题关键抓住AB系统机械能守恒,同时运用除重力外其余力做的功等于机械能的增加量列式求解.
12.(6分)如图所示,在xOy平面内有匀强电场,半径为R的圆周上有一粒子源P,以相同的速率v0在平行于圆周面内沿各个方向发射质量为m、带电量为+q的微粒,微粒可以到达圆周上任意一个位置。比较到达圆上各个位置的微粒,发现到达Q点的微粒的动能最小,从C点离开的微粒的机械能最大,已知∠BOP=30°,∠AOQ=37°,取重力加速度为g,取sin37°=0.6,cos37°=0.8,取最低点D所在水平面为零重力势能面,不计空气阻力及带电微粒间的相互作用。则( )
A.匀强电场的电场强度大小为,方向沿y轴负方向
B.匀强电场的电场强度大小为,方向沿x轴负方向
C.通过D点的微粒动能为mv02+(+)mgR
D.微粒从P点运动到Q点过程中电势能增加
【分析】根据机械能最大点确定电场强度的方向;根据动能定理及功能关系确定各点的动能;根据功能关系求解微粒从P点运动到Q点过程中电势能增加。
【解答】解:ABC、在C点微粒机械能最大,说明P到C电场力做功最大,由数学关系可知,过C点做圆的切线为电场的等势线,即电场力沿OC方向,因带电粒子带正电,场强方向沿OC方向,即沿x轴负方向;而在Q点,微粒动能最小,即重力与电场力的合力方向沿QO,则有:
Eqtan37°=mg
F合sin37°=mg
解得E==,F合==mg
从P到D根据动能定理可得:EkD﹣EkP=W合
则有EkD=+mgR(1+cos37°)+EqRsin30°=(+)mgR+,故BC正确、A错误;
D、微粒从P点运动到Q点过程中克服电场中做的功为WPQ=qER(cos37°﹣sin30°)=,所以电势能增加,故D正确。
故选:BCD。
【点评】解决这类带电粒子在电场中运动问题的该时间能够判断电场力方向,利用电场中有关规律求解;明确电场力做功与电势能和动能间的关系。
二、非选择题(共54分)
13.(6分)某实验小组的同学用如图所示的装置测量滑块与斜面间的动摩擦因数μ.每次滑块都从斜面上由静止开始下滑,测出滑块每次下滑时遮光板到光电门所在位置的距离L及相应遮光时间t的值。
(1)用游标卡尺测量遮光板的宽度d,如图乙所示,则d= 0.225 cm。
(2)为测出滑块与斜面间的动摩擦因数μ,本实验还需要测出或知道的物理量是 BC (填下列序号)。
A.滑块和遮光板的总质量m
B.斜面的倾角θ
C.当地的重力加速度g
(3)实验中测出了多组L和t的值,若要通过线性图象来处理数据求μ值,则应作出的图象为 B ;
A.t2﹣L图象
B.图象
D.L2﹣t图象
C.图象
【分析】(1)游标卡尺的读数等于主尺读数加上游标读数,不需估读。
(2)依据牛顿第二定律,结合运动学公式,及中时刻的瞬时速度等于这段时间内的平均速度,即可求解;
(3)依据的表达式,即可判定;
【解答】解:(1)游标的刻度是20,其精确度为0.05
mm,d=2mm+5×0.05
mm=2.25mm=0.225
cm;
(2)设斜面的倾角为θ,释放滑块时遮光条到光电门间的距离x,滑块经过光电门时的速度为v,物体在斜面上受到重力。
支持力和摩擦力的作用,沿斜面的方向:mgsinθ﹣μmgcosθ=ma,由导出公式2aL=v2﹣0,
由于遮光片经过光电门的时间比较小,所以可以用遮光片经过光电门的平均速度表示瞬时速度,即,
联立解得:,
从公式中可以看出,摩擦因数与斜面的倾角θ、遮光片的宽度d、重力加速度g、遮光条宽度d、遮光时间t以及释放滑块时遮光条到光电门间的距离L有关,
所以还需要测量的物理量为:斜面的倾角θ和释放滑块时遮光条到光电门间的距离x、当地的重力加速度g,故A错误,BC正确;
故选:BC
(3)实验中测出了多组L及t的值,则有:,
应作出的图象为图象;故ACD错误,B正确
故选:B
故答案为:(1)0.225;(2)BC;(3)B
【点评】考查牛顿第二定律与运动学公式的内容,掌握图象的斜率含义,注意理解表达式推导的方法。
14.(9分)某学习小组测绘一个标有“4V,2.4W”的小电风扇(线圈电阻恒定)的伏安特性曲线,电风扇两端的电压需要从零逐渐增加到4V,并便于操作,实验室备有下列器材:
A.电池组(电动势为4V,内阻约为1Ω)
B.被测小电风扇,电路符号“”
C.电压表V1(量程为0~6V,内阻约为4kΩ)
D.电压表V2(量程为0~15V,内阻约为8kΩ)
E.电流表A1(量程为0~0.6A,内阻约为0.2kΩ)
F.电流表A2(量程为0~3A,内阻约为0.05kΩ)
G.滑动变阻器R1(最大阻值为5Ω,额定电流为3A)
H.滑动变阻器R2(最大阻值为2000Ω,额定电流为3A)
I.开关和导线若干
(1)实验中所用的电压表应选 C (填“C”或“D”),电流表应选 E (填“E”或“F”),滑动变阻器应选 G (填“G”或“H”)。
(2)在图甲中所示方框内画出实验电路图。
(3)当电压表的示数大于0.5V时小电风扇才开始转动,小电风扇的伏安特性曲线如图乙所示,图中OA段是直线,AB段是曲线,A点的坐标值为(0.2A,0.5V),B点坐标值为(0.6A,4.0V),则小电风扇的电阻为 2.5 Ω,正常工作时的机械功率为 1.5 W。
【分析】(1)选择器材需安全、精确,根据电风扇的额定电流确定电流表的量程,通过电风扇电阻的大约值,从测量的误差和可操作性角度选择滑动变阻器;
(2)测量伏安特性电流、电压需从零开始测起,滑动变阻器需采用分压式接法,根据电风扇内阻的大小确定电流表的内外接;
(3)电压表读数小于0.5V时电风扇没启动。电能全部转化为内能,根据欧姆定律求出电风扇的电阻,正常工作时根据电流和内阻求出发热功率,根据输入功率,通过能量守恒求出机械功率。
【解答】解:(1)电风扇的额定电压U=4V,所以电压表选取C;
电风扇的额定电流I==A=0.6A,从读数误差的角度考虑,电流表选择E;
电风扇的电阻比较小,则滑动变阻器选择总电阻为5Ω的操作方便,即选择G;
(2)因为电压电流需从零开始测起,则滑动变阻器采用分压式接法,电风扇的电阻大约为:R==Ω≈6.67Ω,远小于电压表内阻,属于小电阻,电流表采用外接法。电路图如图所示;
(3)图中OA段是直线,由于电压表读数小于0.5V时电风扇没启动,根据欧姆定律得,RM==Ω=2.5Ω;
正常工作时电压为4V,根据图象知电流为0.6A,则电风扇发热功率P=I2RM=0.36×2.5W=0.9W,
则机械功率P′=UI﹣I2RM=(4×0.6﹣0.9)W=1.5W。
故答案为:(1)C;E;G;(2)如图所示;(3)2.5;1.5。
【点评】解决本题的关键掌握器材选取的原则,即安全,精确。以及知道滑动变阻器分压式和限流式接法的区别,电流表内外接的区别。知道有电动机存在的电路是非纯电阻电路,清楚电风扇没启动时电能全部转化为内能,正常工作时电能转化为内能和机械能。
15.(6分)如图所示为四旋翼无人机,它是一种能够垂直起降的小型遥控飞行器,目前正得到越来越广泛的应用。一架质量m=1kg的无人机,其动力系统所能提供的最大升力F=16N,无人机上升过程中最大速度为6m/s。若无人机从地面以最大升力竖直起飞,达到最大速度所用时间为3s,假设无人机竖直飞行时所受阻力大小不变。g取10m/s2,求:
(1)无人机在竖直上升过程中所受阻力Ff的大小;
(2)无人机从地面起飞竖直上升至离地面h=30m的高空所需的最短时间。
【分析】(1)根据匀变速运动的速度公式v=atF及牛顿第二定律F﹣Ff﹣mg=ma求解阻力;
(2)无人机先匀加速到速度达到最大值后再匀速上升至离地面h=30m的高空时所需的时间最短;
【解答】解:(1)无人机上升过程中最大速度为6m/s,且达到最大速度所用时间为3s,根据v=at,a===2m/s2,人机以最大升力起飞时的加速度:a═2
m/s2.由牛顿第二定律F﹣Ff﹣mg=ma,得Ff=4
N。
(2)无人机先匀加速到速度达到最大值后再匀速上升至离地面h=30m的高空时所需的时间最短,无人机达到最大速度上升的高度x===9m,需要的时间t1=3s;达到最大速度后以最大速度6m/s匀速上升,需要的时间==3.5s,故总时间t=t1+t2=6.5
s。
答:(1)无人机在竖直上升过程中所受阻力Ff的大小为4
N;
(2)无人机从地面起飞竖直上升至离地面h=30m的高空所需的最短时间为6.5s;
【点评】本题的关键是准确分析无人机的运动及受力状态,再结合匀变速直线的运动公式及牛顿第二定律求解。
16.(14分)如图,光滑水平面上静止质量m1=1.0kg、长L=0.3m的木板,木板右端有质量m2=1.0kg的小滑块,在滑块正上方的0点用长r=0.4m的轻质细绳悬挂质量m=0.5kg的小球。将小球向右上方拉至细绳与整直方向成θ=60°的位置由静止释放,小球摆到最低点与滑块发生正碰并被反弹,碰撞时间极短,碰撞前后瞬间细绳对小球的拉力减小了4.8N,最终小滑块恰好不会从木板上滑下。不计空气阻力、滑块、小球均可视为质点,重力加速度g取10m/s2.求:
(1)小球碰前、碰后瞬间的速度大小;
(2)小滑块与木板之间的动摩擦因数。
【分析】(1)根据机械能守恒定律求出小球下摆到最低点时的速度,根据碰撞前后细绳拉力减小了4.8N,分别列出碰撞前后向心力的表达式,即可求出碰撞后的速度大小;
(2)滑块在木板上滑动的过程,系统的合外力,则系统的动量守恒。利用动量守恒和能量守恒即可求出动摩擦因数。
【解答】解:(1)小球下摆过程,由机械能守恒定律得
mgr(1﹣cosθ)=
可得,小球碰前瞬间的速度大小
v==2m/s
小球与小滑块碰撞前、后瞬间,由向心力公式可得:
T﹣mg=m,T′﹣mg=m
由题意得:T﹣T′=4.8N
联立求得碰后瞬间小球的速度大小为
v′=0.4m/s
(2)小球与小滑块碰撞过程,取向左为正方向,由动量守恒定律得:
mv=﹣mv′+m2v1。
解得:v1=1.2m/s
小滑块在木板上滑动过程中,由动量守恒定律得:
m2v1=(m1+m2)v2
解得:v2=0.6m/s
由能量守恒可得:μm2gL=m2v12﹣(m1+m2)v22
解得小滑块与木板之间的动摩擦因数
μ=0.12
答:
(1)小球碰前、碰后瞬间的速度大小分别是2m/s,0.4m/s。
(2)小滑块与木板之间的动摩擦因数是0.12。
【点评】本题考查了动量守恒定律、能量守恒定律、机械能守恒定律的综合运用,知道小球和小滑块碰撞的瞬间,系统动量守恒;小滑块在木板上运动的过程中,系统动量守恒,能量也守恒。
17.(19分)如图所示,在坐标系xOy的第一象限内有方向竖直向上的匀强电场,第二象限内有磁感应强度大小为B1(未知)、方向垂直于纸面向里的匀强磁场,第三、四象限内有磁感应强度大小为B2(未知)、方向垂直于纸面向里的匀强磁场,一带电荷量为q、质量为m的带负电的粒子,从x轴上的P点(﹣L,0),沿与x轴负方向成37°角的方向向上射出,射出时的初速度大小为v0,经磁场偏转后,垂直通过y轴,粒子运动过程中第一次通过x轴时,速度方向与x轴的正方向刚好成37°角,又经过一段时间刚好从P点第二次通过x轴.不计粒子的重力.求:(sin37°=0.6,cos37°=0.8)
(1)磁感应强度B1的大小及粒子第一次通过y轴的位置;
(2)电场强度E及磁感应强度B2的大小;
(3)粒子从P点出发再回到P点所用的时间.
【分析】(1)作出粒子整个运动过程轨迹,根据几何关系求解粒子做圆周运动的半径,根据洛伦兹力提供向心力求解粒子通过y轴的位置坐标;
(2)粒子在电场中做类平抛运动,根据类平抛运动和速度分解求解粒子通过x轴的速度,根据几何关系可知,粒子在三、四象限内做圆周运动的半径,再根据洛伦兹力提供向心力求解磁感应强度;
(3)分别求出粒子在第二象限的运动时间、在电场中运动时间、在第三、四象限中运动时间,即可得到从P点出发到再回到P点经过的时间.
【解答】解:(1)粒子经过磁场偏转,垂直通过y轴,因此粒子在第二象限的磁场中做圆周运动的圆心在y轴上,作出粒子整个运动过程轨迹如图所示,
根据几何关系可知,粒子做圆周运动的半径为:R1==,
根据qv0B1=m解得:B1=;
粒子第一次通过y轴的位置为:y=R1+R1cos37°=3L,
因此通过y轴的位置坐标为(0,3L);
(2)粒子在电场中做类平抛运动,第一次通过x轴时,速度方向与x轴正方向夹角为37°,
则粒子通过x轴时,在电场中沿x轴方向的位移为:x=v0t1,
y方向的位移为:y=,
又tan37°=,qE=ma,
解得:x=8L,E=;
粒子通过x轴的速度为:v1==,
根据几何关系可知,粒子在三、四象限内做圆周运动的半径为:
R2==7.5L,
根据qv1B2=m解得:B2=;
(3)粒子在第二象限的运动周期为:T1=,
在第二象限的运动时间为:t0=,
在电场中运动时间为:t1=,
在第三、四象限中运动周期为:T2=,
在第三、四象限中运动时间为:t2=,
因此从P点出发到再回到P点经过的时间为:t=t0+t1+t2=().
答:(1)磁感应强度B1的大小及粒子第一次通过y轴的位置为(0,3L);
(2)电场强度E及磁感应强度B2的大小为;
(3)粒子从P点出发再回到P点所用的时间为().
【点评】对于带电粒子在磁场中的运动情况分析,一般是确定圆心位置,根据几何关系求半径,结合洛伦兹力提供向心力求解未知量;根据周期公式结合轨迹对应的圆心角求时间;对于带电粒子在电场中运动时,一般是按类平抛运动的知识进行解答.