中图版六年级全册信息技术 5.3.3一切行动听指挥 课件(7ppt)
文档属性
| 名称 | 中图版六年级全册信息技术 5.3.3一切行动听指挥 课件(7ppt) |  | |
| 格式 | ppt | ||
| 文件大小 | 732.5KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2021-04-08 09:15:02 | ||
图片预览
文档简介
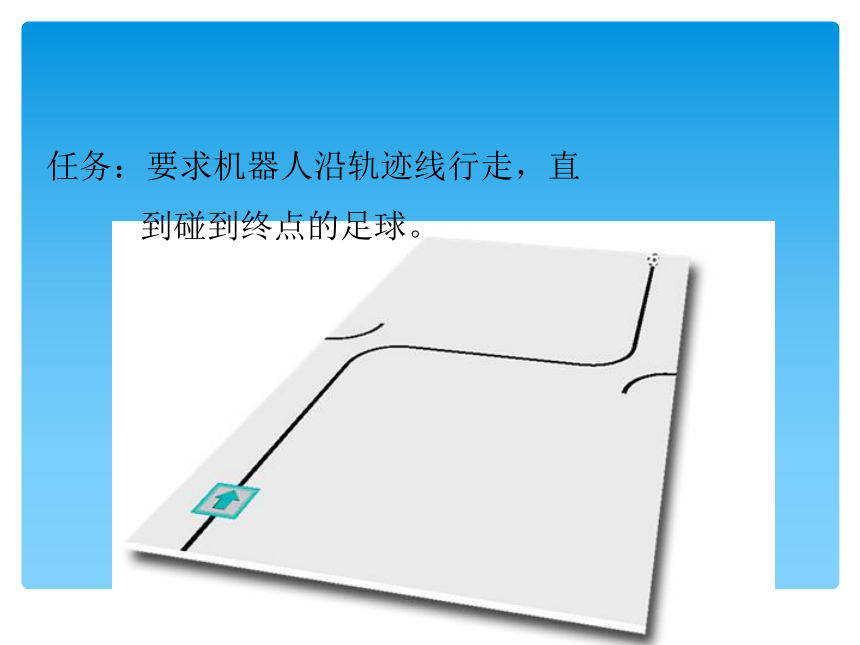
任务:要求机器人沿轨迹线行走,直
到碰到终点的足球。
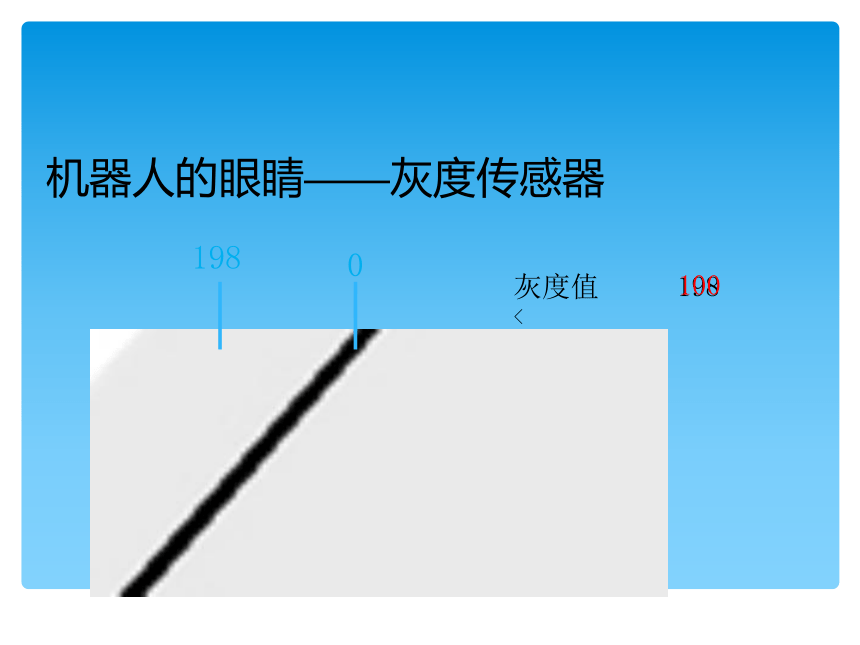
机器人的眼睛——灰度传感器
198
0
灰度值 <
198
100
1.观察道路
2.选择方向
左侧灰度传感器检测到轨迹线(机器人相对轨迹线偏右)
右侧灰度传感器检测到轨迹线(机器人相对轨迹线偏左)
左、右灰度传感器都没检测到轨迹线(机器人在轨迹线中间)
机器人要左转
机器人要右转
机器人前进
左侧灰度值 < 100
右侧灰度值 < 100
常见问题:
1.原地转圈
原因
(1)传感器安装方向错误。
(2)程序中给定的判断条件不准确。
2.前进时摇摆幅度过大,甚至旋转180度走了回头路。
原因
速度设置过高,以致惯性太大。
到碰到终点的足球。
机器人的眼睛——灰度传感器
198
0
灰度值 <
198
100
1.观察道路
2.选择方向
左侧灰度传感器检测到轨迹线(机器人相对轨迹线偏右)
右侧灰度传感器检测到轨迹线(机器人相对轨迹线偏左)
左、右灰度传感器都没检测到轨迹线(机器人在轨迹线中间)
机器人要左转
机器人要右转
机器人前进
左侧灰度值 < 100
右侧灰度值 < 100
常见问题:
1.原地转圈
原因
(1)传感器安装方向错误。
(2)程序中给定的判断条件不准确。
2.前进时摇摆幅度过大,甚至旋转180度走了回头路。
原因
速度设置过高,以致惯性太大。
同课章节目录