3、制作避障机器人
图片预览


文档简介
(共13张PPT)
2012年3月
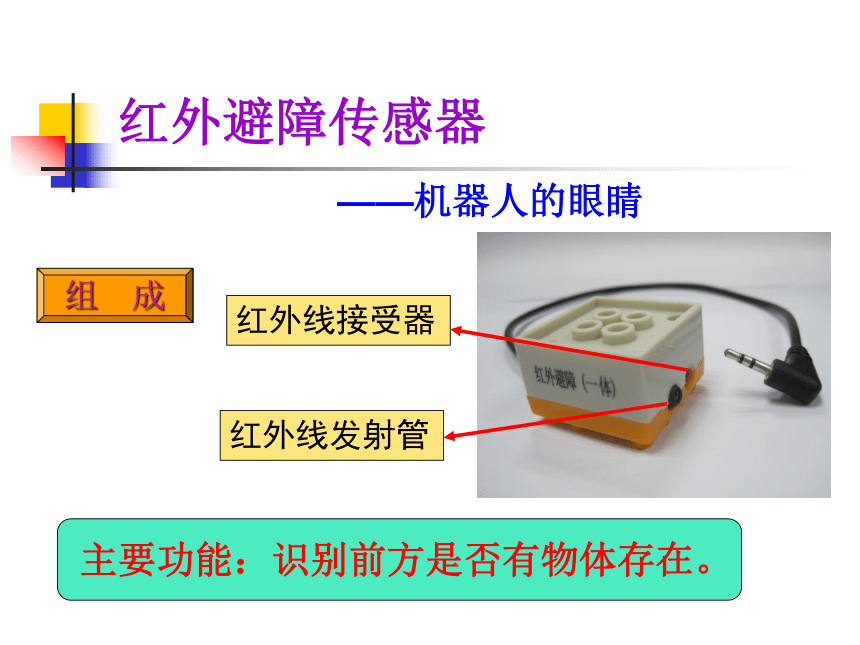
红外避障传感器
——机器人的眼睛
红外线发射管
红外线接受器
主要功能:识别前方是否有物体存在。
组 成
机器人避障原理
我是避障机器人
我是障碍物
这是我的大脑——微电脑
这是我的眼睛——红外避障传感器
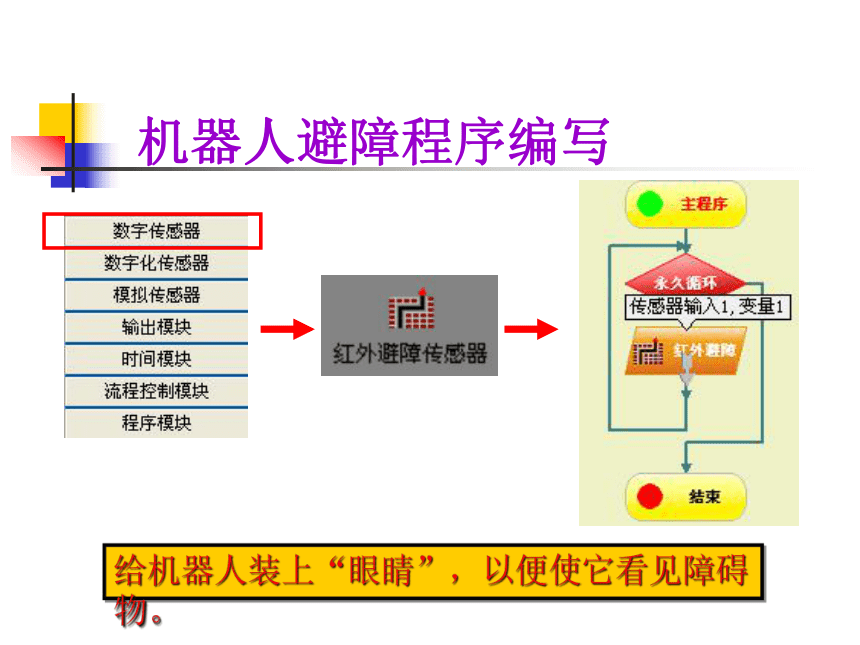
机器人避障程序编写
如果不用永久循环,它只会一个动作。这一步是让机器人在永久循环体中不断循环动作,实现机器人无限重复的智能。
机器人避障程序编写
给机器人装上“眼睛”,以便使它看见障碍物。
机器人避障程序编写
选择红外避障传感器与微电脑的连接端口及使用红外避障变量1。
机器人避障程序编写
判断传感器是否有信号。如果有信号,说明传感器发现了障碍物。
机器人避障程序编写
双击“条件判断”框,输入所需要判断的条件,“红外避障变量1==1”,表示有信号。
机器人避障程序编写
让机器人在识别到障碍物时,马上转向。
机器人避障程序编写
让机器人在没有识别到物体的时候,一直向前走。
仿真环境设置
1、添加障碍物
2、仿真
(一体
主程序
永久距环
结束
主程序
永久循环
传感器输入1,变量1
红外避障
结束
传感器
冈
选择变量:红外避障变量1
选择端口:传感器输入1
匚确定一1
取消
传器
选择变量:红外避障变量1
外避障变量
选择端口:红外避陣变量2
红外避障变量3
红外避障变量4
确定
取消
传感器
选择变量:红外避障变量1
选择端口:传感器输入1
传感器输入2
确定传感器输入3
传感器输入4
传感器输入5
传感器输入6
主程序
永久循环
目红外鞋障
条件否
结束
件表达式
表达式红外避障变量1=1
额定外遊障变量1
使用变量
主程序
永久循环
红外避障
速度:10角度;>料判
条
结束
主程序
永久循环
l红外避障
条件判断
左电机:10右电机:10
转向
速电机
结束
添加
冈
障碍物|色带传感源」
形
C圆形
添加1
取消
2012年3月
红外避障传感器
——机器人的眼睛
红外线发射管
红外线接受器
主要功能:识别前方是否有物体存在。
组 成
机器人避障原理
我是避障机器人
我是障碍物
这是我的大脑——微电脑
这是我的眼睛——红外避障传感器
机器人避障程序编写
如果不用永久循环,它只会一个动作。这一步是让机器人在永久循环体中不断循环动作,实现机器人无限重复的智能。
机器人避障程序编写
给机器人装上“眼睛”,以便使它看见障碍物。
机器人避障程序编写
选择红外避障传感器与微电脑的连接端口及使用红外避障变量1。
机器人避障程序编写
判断传感器是否有信号。如果有信号,说明传感器发现了障碍物。
机器人避障程序编写
双击“条件判断”框,输入所需要判断的条件,“红外避障变量1==1”,表示有信号。
机器人避障程序编写
让机器人在识别到障碍物时,马上转向。
机器人避障程序编写
让机器人在没有识别到物体的时候,一直向前走。
仿真环境设置
1、添加障碍物
2、仿真
(一体
主程序
永久距环
结束
主程序
永久循环
传感器输入1,变量1
红外避障
结束
传感器
冈
选择变量:红外避障变量1
选择端口:传感器输入1
匚确定一1
取消
传器
选择变量:红外避障变量1
外避障变量
选择端口:红外避陣变量2
红外避障变量3
红外避障变量4
确定
取消
传感器
选择变量:红外避障变量1
选择端口:传感器输入1
传感器输入2
确定传感器输入3
传感器输入4
传感器输入5
传感器输入6
主程序
永久循环
目红外鞋障
条件否
结束
件表达式
表达式红外避障变量1=1
额定外遊障变量1
使用变量
主程序
永久循环
红外避障
速度:10角度;>料判
条
结束
主程序
永久循环
l红外避障
条件判断
左电机:10右电机:10
转向
速电机
结束
添加
冈
障碍物|色带传感源」
形
C圆形
添加1
取消
同课章节目录