12.1 杠杆 练习卷 2020-2021学年人教版物理八年级下册word版有答案
文档属性
| 名称 | 12.1 杠杆 练习卷 2020-2021学年人教版物理八年级下册word版有答案 |
|
|
| 格式 | doc | ||
| 文件大小 | 362.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-06-09 00:00:00 | ||
图片预览
文档简介
人教版八年级下册《12.1 杠杆》2021年同步练习卷
一、选择题
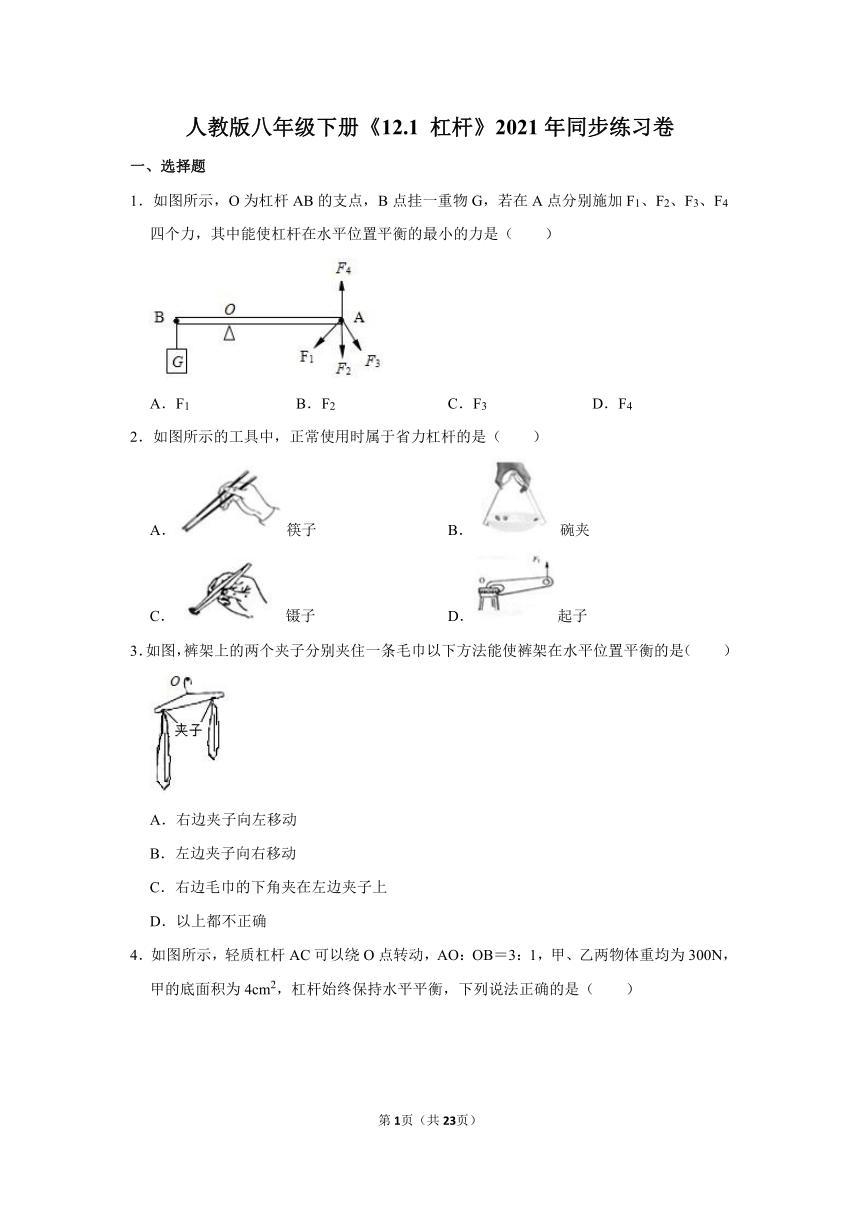
1.如图所示,O为杠杆AB的支点,B点挂一重物G,若在A点分别施加F1、F2、F3、F4四个力,其中能使杠杆在水平位置平衡的最小的力是( )
A.F1 B.F2 C.F3 D.F4
2.如图所示的工具中,正常使用时属于省力杠杆的是( )
A.筷子 B. 碗夹
C. 镊子 D.起子
3.如图,裤架上的两个夹子分别夹住一条毛巾以下方法能使裤架在水平位置平衡的是( )
A.右边夹子向左移动
B.左边夹子向右移动
C.右边毛巾的下角夹在左边夹子上
D.以上都不正确
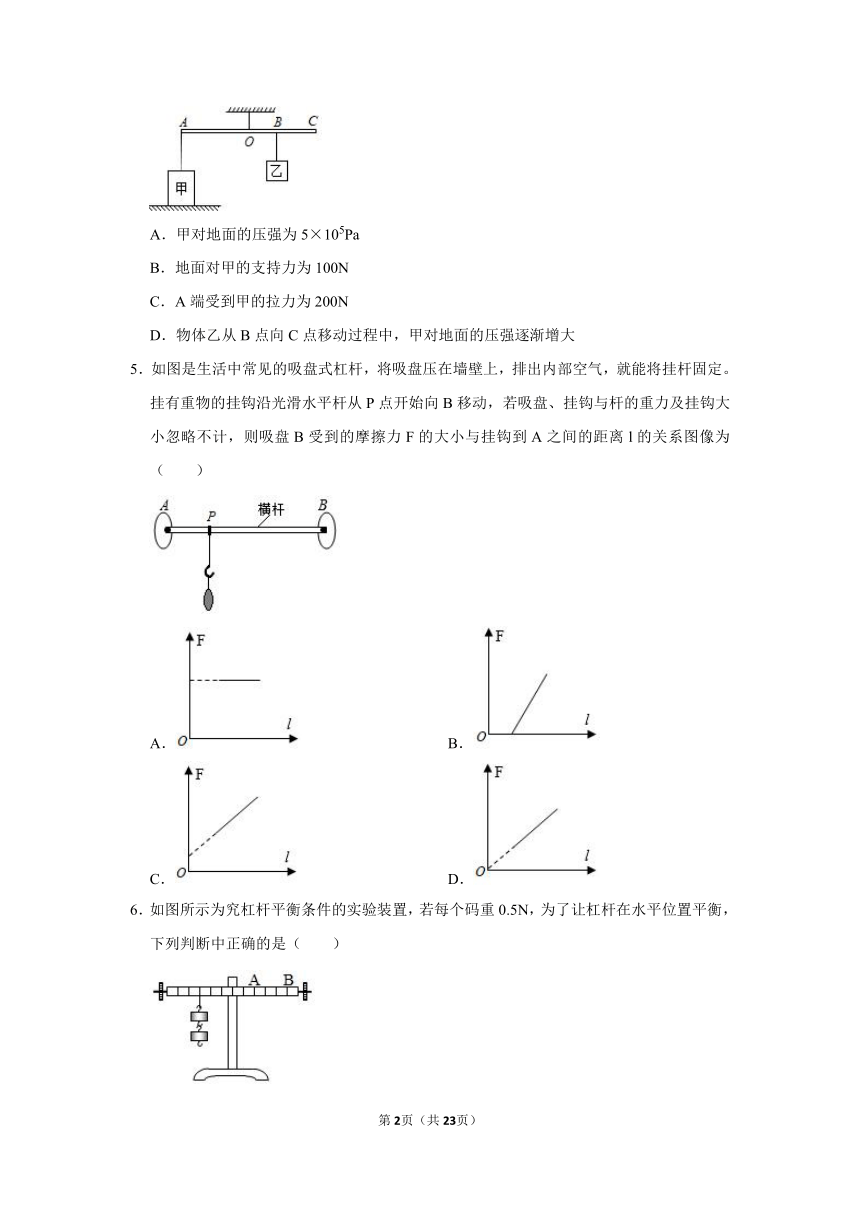
4.如图所示,轻质杠杆AC可以绕O点转动,AO:OB=3:1,甲、乙两物体重均为300N,甲的底面积为4cm2,杠杆始终保持水平平衡,下列说法正确的是( )
A.甲对地面的压强为5×105Pa
B.地面对甲的支持力为100N
C.A端受到甲的拉力为200N
D.物体乙从B点向C点移动过程中,甲对地面的压强逐渐增大
5.如图是生活中常见的吸盘式杠杆,将吸盘压在墙壁上,排出内部空气,就能将挂杆固定。挂有重物的挂钩沿光滑水平杆从P点开始向B移动,若吸盘、挂钩与杆的重力及挂钩大小忽略不计,则吸盘B受到的摩擦力F的大小与挂钩到A之间的距离l的关系图像为( )
A. B.
C. D.
6.如图所示为究杠杆平衡条件的实验装置,若每个码重0.5N,为了让杠杆在水平位置平衡,下列判断中正确的是( )
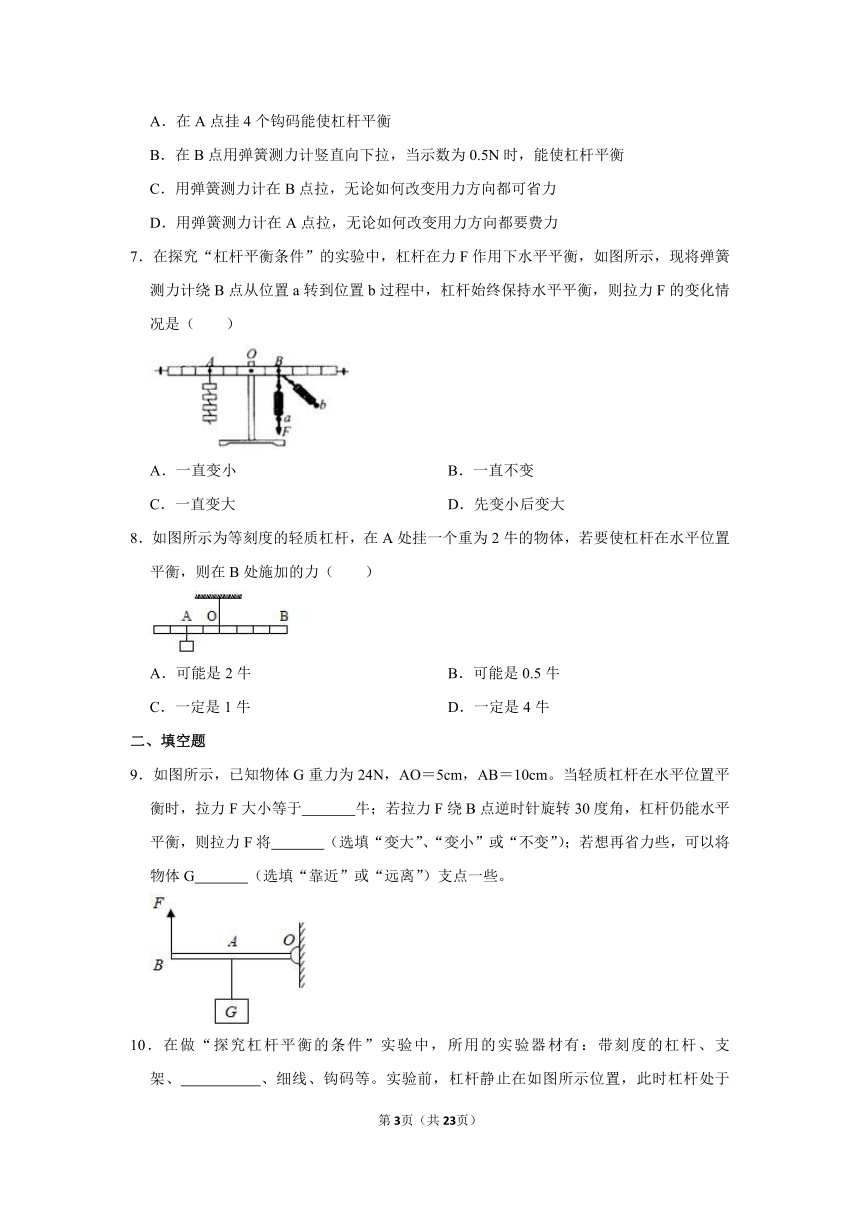
A.在A点挂4个钩码能使杠杆平衡
B.在B点用弹簧测力计竖直向下拉,当示数为0.5N时,能使杠杆平衡
C.用弹簧测力计在B点拉,无论如何改变用力方向都可省力
D.用弹簧测力计在A点拉,无论如何改变用力方向都要费力
7.在探究“杠杆平衡条件”的实验中,杠杆在力F作用下水平平衡,如图所示,现将弹簧测力计绕B点从位置a转到位置b过程中,杠杆始终保持水平平衡,则拉力F的变化情况是( )
A.一直变小 B.一直不变
C.一直变大 D.先变小后变大
8.如图所示为等刻度的轻质杠杆,在A处挂一个重为2牛的物体,若要使杠杆在水平位置平衡,则在B处施加的力( )
A.可能是2牛 B.可能是0.5牛
C.一定是1牛 D.一定是4牛
二、填空题
9.如图所示,已知物体G重力为24N,AO=5cm,AB=10cm。当轻质杠杆在水平位置平衡时,拉力F大小等于 牛;若拉力F绕B点逆时针旋转30度角,杠杆仍能水平平衡,则拉力F将 (选填“变大”、“变小”或“不变”);若想再省力些,可以将物体G (选填“靠近”或“远离”)支点一些。
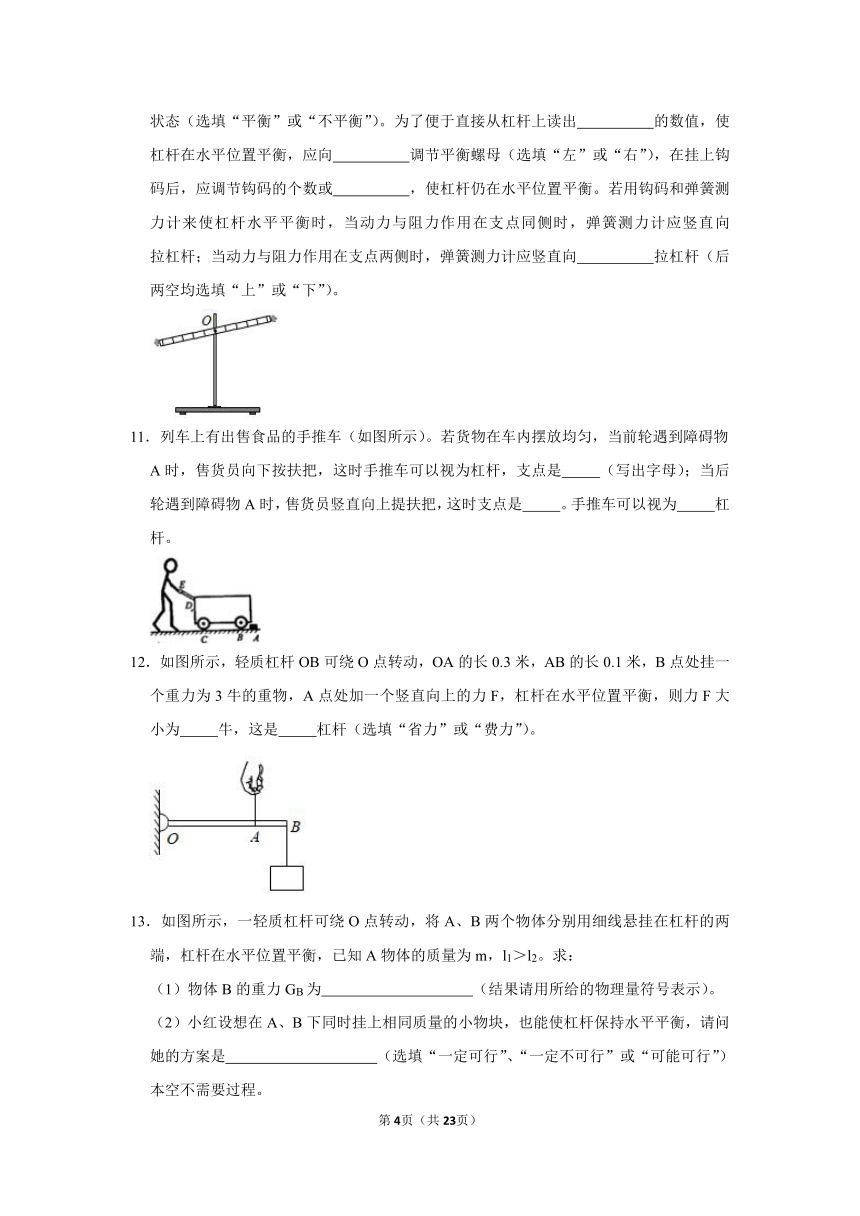
10.在做“探究杠杆平衡的条件”实验中,所用的实验器材有:带刻度的杠杆、支架、 、细线、钩码等。实验前,杠杆静止在如图所示位置,此时杠杆处于 状态(选填“平衡”或“不平衡”)。为了便于直接从杠杆上读出 的数值,使杠杆在水平位置平衡,应向 调节平衡螺母(选填“左”或“右”),在挂上钩码后,应调节钩码的个数或 ,使杠杆仍在水平位置平衡。若用钩码和弹簧测力计来使杠杆水平平衡时,当动力与阻力作用在支点同侧时,弹簧测力计应竖直向 拉杠杆;当动力与阻力作用在支点两侧时,弹簧测力计应竖直向 拉杠杆(后两空均选填“上”或“下”)。
11.列车上有出售食品的手推车(如图所示)。若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 (写出字母);当后轮遇到障碍物A时,售货员竖直向上提扶把,这时支点是 。手推车可以视为 杠杆。
12.如图所示,轻质杠杆OB可绕O点转动,OA的长0.3米,AB的长0.1米,B点处挂一个重力为3牛的重物,A点处加一个竖直向上的力F,杠杆在水平位置平衡,则力F大小为 牛,这是 杠杆(选填“省力”或“费力”)。
13.如图所示,一轻质杠杆可绕O点转动,将A、B两个物体分别用细线悬挂在杠杆的两端,杠杆在水平位置平衡,已知A物体的质量为m,l1>l2。求:
(1)物体B的重力GB为 (结果请用所给的物理量符号表示)。
(2)小红设想在A、B下同时挂上相同质量的小物块,也能使杠杆保持水平平衡,请问她的方案是 (选填“一定可行”、“一定不可行”或“可能可行”)本空不需要过程。
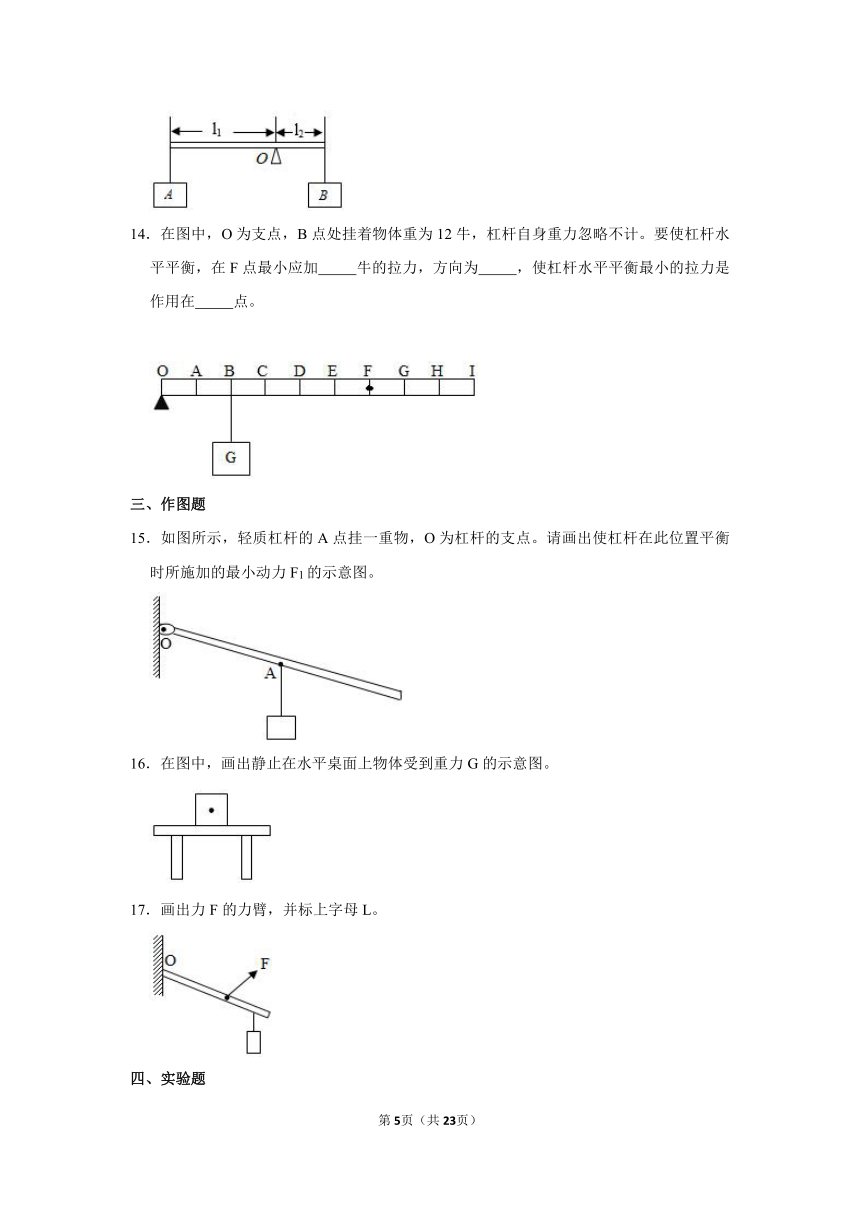
14.在图中,O为支点,B点处挂着物体重为12牛,杠杆自身重力忽略不计。要使杠杆水平平衡,在F点最小应加 牛的拉力,方向为 ,使杠杆水平平衡最小的拉力是作用在 点。
三、作图题
15.如图所示,轻质杠杆的A点挂一重物,O为杠杆的支点。请画出使杠杆在此位置平衡时所施加的最小动力F1的示意图。
16.在图中,画出静止在水平桌面上物体受到重力G的示意图。
17.画出力F的力臂,并标上字母L。
四、实验题
18.在探究“杠杆的平衡条件”的实验中:
(1)所用的实验器材有带刻度的杠杆、铁架台、钩码、线(弹簧夹)和 等。需要测量的物理量是动力、 、动力臂和 。
(2)杠杆静止在图所示位置。此时应将螺母向 调节,使杠杆在 位置平衡,目的是 。此后实验过程中, (选填“能”或“不能”)再旋动两端螺母。
(3)如图所示已挂上两个钩码,可在A位置挂上 个钩码,使杠杆在水平位置平衡。
(4)实验中改变力和力臂多次测量的目的是 。
A.减小误差 B.控制变量 C.得到普遍规律
19.在“探究杠杆平衡条件”的实验中:
(1)如图甲,把质量分布均匀的杠杆中点O作为支点,其目的是消除 对实验的影响。为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的 。
(2)图乙中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动 格。当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 力。
(3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,弹簧测计示数 (选填“大于”、“小于”或“等于”)1N,如果竖直向上拉动弹簧测力计,它是 杠杆(选填“省力”、“费力”或“等臂”)(每个钩码重0.5N)。
20.在探究杠杆平衡条件的实验中:
(1)如图1所示,若杠杆在使用前左端低、右端高,要使它在水平位置平衡,应将杠杆右端的螺母向 (选填“左”或“右”)调节至平衡。杠杆平衡后,在整个实验过程中, (选填“可以”或“不可以”)再旋动两侧的螺母。
(2)下列实验步骤中:
A.将杠杆放在支架上,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
B.计算每次实验中F1L1和F2L2的大小,根据计算结果得出杠杆的平衡条件。
C.再次改变钩码的个数或位置,重复实验。
D.记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中。
E.将钩码挂在杠杆的两边,改变钩码的位置,使杠杆在水平位置重新平衡。
正确的顺序是 (填字母)。
(3)每个钩码重1N,杠杆上每格长度是4cm。如表是某同学记录的实验数据。
次数 F1/N L1/cm F2/N L2/cm
1 1 8 2 4
2 2 8 1 16
3 2 12 3 8
分析上述数据,可得出的杠杆的平衡条件是: 。
(4)若杠杆如图2所示静止不动,此时杠杆处于 (选填“平衡”或“不平衡”)状态,但 (选填“能”或“不能”)测量相关数据、得出实验结论。
(5)如图3所示,杠杆在水平位置平衡,如果这时在两侧钩码下各增加一个相同的钩码,杠杆的 端(选填“左”或“右”)将下沉。
五、综合题
21.如图,质量分布均匀的圆柱体木棒左端与支点O连接,绕O转动时,木棒所受的摩擦可忽略不计。现木棒右端受到竖直向上的拉力F而保持静止。
(1)若把该木棒看作一个杠杆,则此杠杆是否处于平衡状态?
答: (选填“是”或“否”),判断的依据是 。
(2)若以F为杠杆的动力,木棒所受的重力为阻力,请在图中画出拉力F的力臂L1和重力G及其力臂L2,根据 可判断此杠杆为 (“省力”、“费力”或“等臂”)杠杆。
22.如图甲所示的独轮车是生活中搬运泥土轻便工具,某次搬运泥土时,车体和泥土的总重G=1000N,运泥土时从A点提起独轮车把手。图乙为独轮车被抬起到某位置静止时的示意图,已知:AO=1.2m,C为OB连线上一点,OC=0.3m,OB=1m。
(1)独轮车可看作是一个 (选填“省力”或“费力”)杠杆。
(2)图乙所示位置时,手需要提供的最小拉力F为 N;若继续向上拉动,所需最小拉力将 (选填“变大”、“变小”或“不变”)。
(3)为了更轻便,可以把车厢内泥土适当向 (选填“左”或“右”)移。
人教版八年级下册《12.1 杠杆》2021年同步练习卷
参考答案与试题解析
一、选择题
1.如图所示,O为杠杆AB的支点,B点挂一重物G,若在A点分别施加F1、F2、F3、F4四个力,其中能使杠杆在水平位置平衡的最小的力是( )
A.F1 B.F2 C.F3 D.F4
解:
由图可知,动力F4、F2都与OA垂直,则动力F4和F2对应的动力臂就是OA,它是最长的动力臂;
由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;因为F4和F2对应的动力臂最长,所以F4和F2最小;
为使杠杆平衡时,动力和阻力的转动效果是相反的,左边的阻力使杠杆有逆时针转动的效果,则右边的动力应有使杠杆顺时针转动的效果,即动力的方向应向下,所以可判断最小的力是F2。
故选:B。
2.如图所示的工具中,正常使用时属于省力杠杆的是( )
A.筷子 B. 碗夹
C. 镊子 D.起子
解:
ABC、筷子、碗夹、镊子在使用过程中,动力臂小于阻力臂,是费力杠杆;
D、起子在使用过程中,动力臂大于阻力臂,是省力杠杆。
故选:D。
3.如图,裤架上的两个夹子分别夹住一条毛巾以下方法能使裤架在水平位置平衡的是( )
A.右边夹子向左移动
B.左边夹子向右移动
C.右边毛巾的下角夹在左边夹子上
D.以上都不正确
解:
A、右边夹子向左移动,右端的力不变,力臂变小,右端力和力臂的乘积更小,裤架会更向左倾斜,故A错误。
B、左边夹子向右移动,右端的力不变,力臂变大,右端力和力臂乘积更大,裤架会向右倾斜,能在水平位置平衡,故B正确。
C、右边毛巾的下角夹在左边夹子上,相当于右端减小了重力,左端增加了重力,导致左端力和力臂乘积更大,右端力和力臂的乘积更小,裤架会更向左倾斜,故C错误。
D、综上所述,故D错误。
故选:B。
4.如图所示,轻质杠杆AC可以绕O点转动,AO:OB=3:1,甲、乙两物体重均为300N,甲的底面积为4cm2,杠杆始终保持水平平衡,下列说法正确的是( )
A.甲对地面的压强为5×105Pa
B.地面对甲的支持力为100N
C.A端受到甲的拉力为200N
D.物体乙从B点向C点移动过程中,甲对地面的压强逐渐增大
解:(1)由杠杆平衡条件可得:FA×OA=G乙×OB,则A端受到甲的拉力:FA===100N,故C错误;
甲受到竖直向上的支持力、拉力以及竖直向下的重力,甲静止,因此F支持力+FA=G甲,即F支持力=G甲﹣FA=300N﹣100N=200N,故B错误;
由于力的作用是相互的,所以甲对地面的压力:F=F支持力=200N,
故甲对地面的压强:p===5×105Pa,故A正确;
(2)根据图示可知,物体乙从B点向C点移动过程中,其力臂逐渐增大,由杠杆平衡条件可知,A端受到的拉力逐渐变大,则地面对甲的支持力逐渐变小,故甲对地面的压力变小,由p=可知,甲对地面的压强逐渐变小,故D错误。
故选:A。
5.如图是生活中常见的吸盘式杠杆,将吸盘压在墙壁上,排出内部空气,就能将挂杆固定。挂有重物的挂钩沿光滑水平杆从P点开始向B移动,若吸盘、挂钩与杆的重力及挂钩大小忽略不计,则吸盘B受到的摩擦力F的大小与挂钩到A之间的距离l的关系图像为( )
A. B.
C. D.
解:以吸盘A为支点,设挂钩与吸盘A的距离为l,
根据杠杆的平衡条件可得:G×l=F×AB,
则F=,AB、G不变,l不为零,由于此算式成正比例关系,所以经过原点,故吸盘B受到的摩擦力F的大小与l的关系图像为D。
故选:D。
6.如图所示为究杠杆平衡条件的实验装置,若每个码重0.5N,为了让杠杆在水平位置平衡,下列判断中正确的是( )
A.在A点挂4个钩码能使杠杆平衡
B.在B点用弹簧测力计竖直向下拉,当示数为0.5N时,能使杠杆平衡
C.用弹簧测力计在B点拉,无论如何改变用力方向都可省力
D.用弹簧测力计在A点拉,无论如何改变用力方向都要费力
解:每个钩码重力为0.5N,设每个小格长度为L,则支点左侧力与力臂的乘积为:1N×3L=3N×L;
A、在A点挂4个钩码时,杠杆右侧力与力臂的积为:2N×2L=4N×L>3N×L,杠杆不能平衡,故A错误;
B、在B点用弹簧测力计竖直向下拉,当示数为0.5N时,杠杆右侧力与力臂的积为:0.5N×5L=2.5N×L<3N×L,杠杆不能平衡,故B错误;
C、用弹簧测力计在B点用弹簧测力计竖直向下拉,根据杠杆平衡条件知,1N×3L=F×5L,最小拉力为0.6N;当力的方向改变时,力臂减小,使力臂小于3L时,拉力要大于1N,杠杆费力,用弹簧测力计在B点拉,当力臂为3L时,拉力为1N.根据杠杆平衡条件知,当改变用力方向,使力臂小于3L时,拉力要大于1N,杠杆才能平衡,要费力,故C错误;
D、用弹簧测力计在A点用弹簧测力计竖直向下拉,根据杠杆平衡条件知,1N×3L=F×2L,最小拉力为1.5N;当力的方向改变时,力臂减小,无论如何改变用力方向力都要大于1.5N,都要费力,故D正确。
故选:D。
7.在探究“杠杆平衡条件”的实验中,杠杆在力F作用下水平平衡,如图所示,现将弹簧测力计绕B点从位置a转到位置b过程中,杠杆始终保持水平平衡,则拉力F的变化情况是( )
A.一直变小 B.一直不变
C.一直变大 D.先变小后变大
解:将弹簧测力计绕B点从a位置转动到b位置的过程中,钩码的重力不变,其力臂不变,即阻力与阻力臂的乘积不变;
将弹簧测力计绕B点从a位置转动到b位置的过程中,拉力F的力臂逐渐变小,由杠杆的平衡条件F1L1=F2L2可知,拉力F逐渐变大。
故选:C。
8.如图所示为等刻度的轻质杠杆,在A处挂一个重为2牛的物体,若要使杠杆在水平位置平衡,则在B处施加的力( )
A.可能是2牛 B.可能是0.5牛
C.一定是1牛 D.一定是4牛
解:设杠杆每一格长度是L,
当B处的作用力与杠杆垂直时,力臂最大,此时作用力最小,
由杠杆平衡条件可得:FALA=FB最小LB,即:2N×2L=FB最小×4L,
则FB最小=1N,当作用在B处的力与杠杆不垂直时,力臂小于4L,
作用力大于1N,因此要使杠杆平衡,作用在B处的力F≥1N,故BCD错误、A正确。
故选:A。
二、填空题
9.如图所示,已知物体G重力为24N,AO=5cm,AB=10cm。当轻质杠杆在水平位置平衡时,拉力F大小等于 12 牛;若拉力F绕B点逆时针旋转30度角,杠杆仍能水平平衡,则拉力F将 变大 (选填“变大”、“变小”或“不变”);若想再省力些,可以将物体G 靠近 (选填“靠近”或“远离”)支点一些。
解:(1)根据杠杆平衡条件可得:G×OA=F×OB,
所以拉力大小为F===12N;
(2)拉力F绕B点逆时针旋转30度角,杠杆仍能水平平衡,阻力和阻力臂不变,动力臂减小,则力F的大小将变大
若想再省力些,将物体G向O点靠近,阻力臂减小,根据杠杆平衡条件F1L1=F2L2可知,阻力和动力臂不变,阻力臂减小,则力F的大小将变小。
故答案为:12;变大;靠近。
10.在做“探究杠杆平衡的条件”实验中,所用的实验器材有:带刻度的杠杆、支架、 弹簧测力计 、细线、钩码等。实验前,杠杆静止在如图所示位置,此时杠杆处于 平衡 状态(选填“平衡”或“不平衡”)。为了便于直接从杠杆上读出 力臂 的数值,使杠杆在水平位置平衡,应向 右 调节平衡螺母(选填“左”或“右”),在挂上钩码后,应调节钩码的个数或 钩码位置 ,使杠杆仍在水平位置平衡。若用钩码和弹簧测力计来使杠杆水平平衡时,当动力与阻力作用在支点同侧时,弹簧测力计应竖直向 上 拉杠杆;当动力与阻力作用在支点两侧时,弹簧测力计应竖直向 下 拉杠杆(后两空均选填“上”或“下”)。
解:
(1)实验时要用弹簧测力计测量力的大小,实验时要使用弹簧测力计;
(2)实验前,杠杆静止在如图所示位置,此时杠杆静止,处于平衡状态;
为了便于直接从杠杆上读出力臂的数值,使杠杆在水平位置平衡,杠杆左端低,应向右调节平衡螺母;在挂上钩码后,应调节钩码的个数或钩码位置,使杠杆仍在水平位置平衡;
(3)用钩码和弹簧测力计来使杠杆水平平衡时,当动力与阻力作用在支点同侧时,在杠杆的同侧施加相反方向的力,弹簧测力计应竖直向上拉杠杆;当动力与阻力作用在支点两侧时,在杠杆的两侧施加相同方向的力,弹簧测力计应竖直向下拉杠杆。
故答案为:弹簧测力计;平衡;力臂;右;钩码位置;上;下。
11.列车上有出售食品的手推车(如图所示)。若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 C (写出字母);当后轮遇到障碍物A时,售货员竖直向上提扶把,这时支点是 。手推车可以视为 省力 杠杆。
解:(1)当前轮遇到障碍物A时,售货员向下压扶手,手推车可看作杠杆,手推车绕着C点转动,C是支点;
当后轮遇到障碍时,售货员向上提扶手,手推车绕着B点转动,B是支点;
(2)当后轮遇到障碍物A时,支点是B点,当前轮遇到障碍物A时,C是支点,在这两种情况下,阻力(手推车重力)与阻力臂相等,后轮遇到障碍物时的动力臂大于前轮遇到障碍物时的动力臂,由杠杆平衡条件可知,在阻力与阻力臂一定时,动力臂越大,动力越小,因此与前轮遇到障碍物时相比,此时较省力。
故答案为:C;B;省力。
12.如图所示,轻质杠杆OB可绕O点转动,OA的长0.3米,AB的长0.1米,B点处挂一个重力为3牛的重物,A点处加一个竖直向上的力F,杠杆在水平位置平衡,则力F大小为 4 牛,这是 费力 杠杆(选填“省力”或“费力”)。
解:由杠杆平衡的条件可得:F×OA=G×OB,
即F×0.3m=3N×(0.3m+0.1m)
解得:F=4N;
此杠杆动力大于阻力,属于费力杠杆。
故答案为:4;费力。
13.如图所示,一轻质杠杆可绕O点转动,将A、B两个物体分别用细线悬挂在杠杆的两端,杠杆在水平位置平衡,已知A物体的质量为m,l1>l2。求:
(1)物体B的重力GB为 (结果请用所给的物理量符号表示)。
(2)小红设想在A、B下同时挂上相同质量的小物块,也能使杠杆保持水平平衡,请问她的方案是 一定不可行 (选填“一定可行”、“一定不可行”或“可能可行”)本空不需要过程。
解:(1)将A、B两个物体分别用细线悬挂在杠杆的两端,杠杆在水平位置平衡,根据杠杆的平衡条件可知:GAl1=GBl2,物体B的重力为:GB==;
(2)在A、B下同时挂上相同质量的小物块,设小物块的质量为m';
支点左侧力与力臂的乘积为:(GA+m'g)l1=GAl1+m'gl1;
支点右侧力与力臂的乘积为:(GB+m'g)l2=GBl2+m'gl2;
根据l1>l2可知,m'gl1>m'gl2;由于GAl1=GBl2,所以GAl1+m'gl1>GBl2+m'gl2;此时的杠杆一定不能平衡。
故答案为:(1);(2)一定不可行。
14.在图中,O为支点,B点处挂着物体重为12牛,杠杆自身重力忽略不计。要使杠杆水平平衡,在F点最小应加 4 牛的拉力,方向为 竖直向上 ,使杠杆水平平衡最小的拉力是作用在 I 点。
解:(1)由杠杆平衡条件可知,在阻力跟阻力臂的乘积一定时,动力臂越长,动力越小。
由图可知,当力的方向跟杠杆OF垂直向上(竖直向上)时动力臂最长、动力最小;
由杠杆平衡条件得:F×OF=G×LG,
所以F===4N;
(2)由杠杆平衡条件可知,在阻力跟阻力臂的乘积一定时,动力臂越长,动力越小。
由图可知,当动力臂为OI时最长、动力最小,故使杠杆水平平衡最小的拉力是作用在I点。
故答案为:4;竖直向上;I。
三、作图题
15.如图所示,轻质杠杆的A点挂一重物,O为杠杆的支点。请画出使杠杆在此位置平衡时所施加的最小动力F1的示意图。
解:在杠杆的最右端B点施加力,并且垂直OB向上,此时动力臂最大,而阻力、阻力臂一定,由杠杆平衡条件可知此时最省力、用力最小;
因为阻力方向竖直向下,为使杠杆平衡,则动力方向向上,如图所示:
16.在图中,画出静止在水平桌面上物体受到重力G的示意图。
解:重力的方向是竖直向下的,过重心画一条带箭头的竖直向下的有向线段,用G表示,如图所示:
17.画出力F的力臂,并标上字母L。
解:图中O为支点,反向延长力F画出力的作用线,然后由支点O向F的作用线作垂线,垂线段的长度L为F的力臂,如图所示:
四、实验题
18.在探究“杠杆的平衡条件”的实验中:
(1)所用的实验器材有带刻度的杠杆、铁架台、钩码、线(弹簧夹)和 弹簧测力计 等。需要测量的物理量是动力、 阻力 、动力臂和 阻力臂 。
(2)杠杆静止在图所示位置。此时应将螺母向 右 调节,使杠杆在 水平 位置平衡,目的是 便于测量力臂 。此后实验过程中, 不能 (选填“能”或“不能”)再旋动两端螺母。
(3)如图所示已挂上两个钩码,可在A位置挂上 3 个钩码,使杠杆在水平位置平衡。
(4)实验中改变力和力臂多次测量的目的是 C 。
A.减小误差 B.控制变量 C.得到普遍规律
解:(1)探究杠杆平衡的条件时,要利用弹簧测力计测量力的大小,故还需要弹簧测力计;
需要测量的物理量是动力、阻力、动力臂、阻力臂;
(2)杠杆静止在图所示位置。杠杆左端低,说明重心偏左,为了使它在水平位置平衡,应将杠杆平衡螺母向右调节,目的是便于测量力臂;
(3)根据杠杆平衡的条件,F1×L1=F2×L2,
2G×3L=nG×2L解得n=3,
可在A位置挂3个钩码,使杠杆在水平位置平衡;
(4)多次改变力和力臂的大小,得到了多组实验数据,得出了杠杆平衡条件。该实验测多组数据的目的是为了得出的结论更具有普遍性,故选C。
故答案为:(1)弹簧测力计;阻力;阻力臂;(2)右;水平;便于测量力臂;不能;(3)3;(4)C。
19.在“探究杠杆平衡条件”的实验中:
(1)如图甲,把质量分布均匀的杠杆中点O作为支点,其目的是消除 杠杆自重 对实验的影响。为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的 运动状态 。
(2)图乙中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动 1 格。当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 平衡 力。
(3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,弹簧测计示数 大于 (选填“大于”、“小于”或“等于”)1N,如果竖直向上拉动弹簧测力计,它是 省力 杠杆(选填“省力”、“费力”或“等臂”)(每个钩码重0.5N)。
解:(1)把质量分布均匀的杠杆中点置于支架上,杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响;
为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的运动状态;
(2)设一个钩码重为G,一格的长度为L;根据杠杆的平衡条件可得:4G×2L=2G×nL,
解得:n=4,故应该将B处所挂钩码须向右移动4﹣3=1格;
静止的钩码处于平衡状态,受到的重力和对钩码的拉力是一对平衡力。
(3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,根据杠杆的平衡条件,弹簧测计示数:
F==2G=2×0.5N=1N,
由于弹簧测力计拉力F的力臂小于4L,故F大于1N;如果竖直向上拉动弹簧测力计,弹簧测力计力的力臂大于钩码的力臂,故它是省力杠杆;
故答案为:(1)杠杆自重;运动状态;(2)1;平衡;(3)大于;省力。
20.在探究杠杆平衡条件的实验中:
(1)如图1所示,若杠杆在使用前左端低、右端高,要使它在水平位置平衡,应将杠杆右端的螺母向 右 (选填“左”或“右”)调节至平衡。杠杆平衡后,在整个实验过程中, 不可以 (选填“可以”或“不可以”)再旋动两侧的螺母。
(2)下列实验步骤中:
A.将杠杆放在支架上,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
B.计算每次实验中F1L1和F2L2的大小,根据计算结果得出杠杆的平衡条件。
C.再次改变钩码的个数或位置,重复实验。
D.记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中。
E.将钩码挂在杠杆的两边,改变钩码的位置,使杠杆在水平位置重新平衡。
正确的顺序是 AEDCB (填字母)。
(3)每个钩码重1N,杠杆上每格长度是4cm。如表是某同学记录的实验数据。
次数 F1/N L1/cm F2/N L2/cm
1 1 8 2 4
2 2 8 1 16
3 2 12 3 8
分析上述数据,可得出的杠杆的平衡条件是: 动力×动力臂=阻力×阻力臂(或F1L1=F2L2) 。
(4)若杠杆如图2所示静止不动,此时杠杆处于 平衡 (选填“平衡”或“不平衡”)状态,但 不能 (选填“能”或“不能”)测量相关数据、得出实验结论。
(5)如图3所示,杠杆在水平位置平衡,如果这时在两侧钩码下各增加一个相同的钩码,杠杆的 左 端(选填“左”或“右”)将下沉。
解:(1)在使用此杠杆前发现左端低,右端高,说明杠杆的重心偏左,要使它在水平位置平衡,左、右两端的螺母(或一端的螺母)都要向杠杆上翘的右端调节。所以可以将杠杆右端的平衡螺母向右调节,也可以将左端的平衡螺母向右调节,此后,在整个实验过程中,螺母再调节会改变杠杆重心的位置,使杠杆重力对杠杆平衡又产生影响,因此不能再旋动两侧的平衡螺母;
(2)经分析,探究杠杆平衡的步骤为:
A、调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
E、将钩码挂在杠杆的支上点两边,先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置重新平衡。
D、记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中。
C、改变钩码的个数和位置,重复实验。
B、计算每次实验中F1L1和F2L2的大小,根据计算结果得出杠杆的平衡条件。
故正确的顺序是:AEDCB;
(3)由表格中数据知,动力、动力臂的乘积等于阻力、阻力臂的乘积,可得杠杆平衡条件是:F1L1=F2L2;
(4)实验前,杠杆静止在如图甲所示的位置,杠杆静止,此时杠杆处于平衡状态;为了便于测量力臂,应使杠杆在水平位置平衡,由图甲可知,杠杆右端偏高,不能测量相关数据、得出实验结论;
(5)如图,杠杆在水平位置平衡,如果这时在两侧钩码下各增加一个相同的钩码,每个钩码重1N,杠杆上每格长度是Lcm,3GN×3Lcm>4GN×2Lcm,
所以F1l1>F2l2,所以杠杆的左端下沉。
故答案为:(1)右;不可以;(2)AEDCB;(3)动力×动力臂=阻力×阻力臂(或F1L1=F2L2);(4)平衡;不能;(5)左。
五、综合题
21.如图,质量分布均匀的圆柱体木棒左端与支点O连接,绕O转动时,木棒所受的摩擦可忽略不计。现木棒右端受到竖直向上的拉力F而保持静止。
(1)若把该木棒看作一个杠杆,则此杠杆是否处于平衡状态?
答: 是 (选填“是”或“否”),判断的依据是 杠杆处于静止状态 。
(2)若以F为杠杆的动力,木棒所受的重力为阻力,请在图中画出拉力F的力臂L1和重力G及其力臂L2,根据 动力臂大于阻力臂 可判断此杠杆为 省力 (“省力”、“费力”或“等臂”)杠杆。
解:(1)根据图可知,木棒右端受到竖直向上的拉力F而保持静止,因此此时的杠杆是平衡状态;
(2)木棒所受的重力G的方向是竖直向下的,作用在杠杆的中心上;从支点分别做F和G的力的作用线的垂线,该垂线段为力臂;如图所示:
由图可知,此时的动力臂大于阻力臂,为省力杠杆。
故答案为:(1)是;杠杆处于静止状态;(2)如图;动力臂大于阻力臂;省力。
22.如图甲所示的独轮车是生活中搬运泥土轻便工具,某次搬运泥土时,车体和泥土的总重G=1000N,运泥土时从A点提起独轮车把手。图乙为独轮车被抬起到某位置静止时的示意图,已知:AO=1.2m,C为OB连线上一点,OC=0.3m,OB=1m。
(1)独轮车可看作是一个 省力 (选填“省力”或“费力”)杠杆。
(2)图乙所示位置时,手需要提供的最小拉力F为 250 N;若继续向上拉动,所需最小拉力将 变小 (选填“变大”、“变小”或“不变”)。
(3)为了更轻便,可以把车厢内泥土适当向 左 (选填“左”或“右”)移。
解:
(1)因为独轮车在使用过程中,动力臂大于阻力臂,所以是省力杠杆;
(2)根据杠杆的平衡条件,在阻力和阻力臂不变的情况下,当动力臂最长时,最省力,故当在A点垂直于OA的方向上用力,此时动力臂最长(即OA),最省力,由杠杆平衡条件可得F×OA=G×OC,即F×1.2m=1000N×0.3m,解得F=250N;
若继续向上拉动,动力臂不变(等于OA),阻力臂(重力的力臂)减小,阻力G不变,根据杠杆的平衡条件F1L1=F2L2可知,所需最小拉力将变小;
(3)为了更轻便,可以把车厢内泥土适当向左移动,减小了阻力臂,动力也会减小,能达到省力的目的。
故答案为:(1)省力;(2)250;变小;(3)左。
第1页(共3页)
一、选择题
1.如图所示,O为杠杆AB的支点,B点挂一重物G,若在A点分别施加F1、F2、F3、F4四个力,其中能使杠杆在水平位置平衡的最小的力是( )
A.F1 B.F2 C.F3 D.F4
2.如图所示的工具中,正常使用时属于省力杠杆的是( )
A.筷子 B. 碗夹
C. 镊子 D.起子
3.如图,裤架上的两个夹子分别夹住一条毛巾以下方法能使裤架在水平位置平衡的是( )
A.右边夹子向左移动
B.左边夹子向右移动
C.右边毛巾的下角夹在左边夹子上
D.以上都不正确
4.如图所示,轻质杠杆AC可以绕O点转动,AO:OB=3:1,甲、乙两物体重均为300N,甲的底面积为4cm2,杠杆始终保持水平平衡,下列说法正确的是( )
A.甲对地面的压强为5×105Pa
B.地面对甲的支持力为100N
C.A端受到甲的拉力为200N
D.物体乙从B点向C点移动过程中,甲对地面的压强逐渐增大
5.如图是生活中常见的吸盘式杠杆,将吸盘压在墙壁上,排出内部空气,就能将挂杆固定。挂有重物的挂钩沿光滑水平杆从P点开始向B移动,若吸盘、挂钩与杆的重力及挂钩大小忽略不计,则吸盘B受到的摩擦力F的大小与挂钩到A之间的距离l的关系图像为( )
A. B.
C. D.
6.如图所示为究杠杆平衡条件的实验装置,若每个码重0.5N,为了让杠杆在水平位置平衡,下列判断中正确的是( )
A.在A点挂4个钩码能使杠杆平衡
B.在B点用弹簧测力计竖直向下拉,当示数为0.5N时,能使杠杆平衡
C.用弹簧测力计在B点拉,无论如何改变用力方向都可省力
D.用弹簧测力计在A点拉,无论如何改变用力方向都要费力
7.在探究“杠杆平衡条件”的实验中,杠杆在力F作用下水平平衡,如图所示,现将弹簧测力计绕B点从位置a转到位置b过程中,杠杆始终保持水平平衡,则拉力F的变化情况是( )
A.一直变小 B.一直不变
C.一直变大 D.先变小后变大
8.如图所示为等刻度的轻质杠杆,在A处挂一个重为2牛的物体,若要使杠杆在水平位置平衡,则在B处施加的力( )
A.可能是2牛 B.可能是0.5牛
C.一定是1牛 D.一定是4牛
二、填空题
9.如图所示,已知物体G重力为24N,AO=5cm,AB=10cm。当轻质杠杆在水平位置平衡时,拉力F大小等于 牛;若拉力F绕B点逆时针旋转30度角,杠杆仍能水平平衡,则拉力F将 (选填“变大”、“变小”或“不变”);若想再省力些,可以将物体G (选填“靠近”或“远离”)支点一些。
10.在做“探究杠杆平衡的条件”实验中,所用的实验器材有:带刻度的杠杆、支架、 、细线、钩码等。实验前,杠杆静止在如图所示位置,此时杠杆处于 状态(选填“平衡”或“不平衡”)。为了便于直接从杠杆上读出 的数值,使杠杆在水平位置平衡,应向 调节平衡螺母(选填“左”或“右”),在挂上钩码后,应调节钩码的个数或 ,使杠杆仍在水平位置平衡。若用钩码和弹簧测力计来使杠杆水平平衡时,当动力与阻力作用在支点同侧时,弹簧测力计应竖直向 拉杠杆;当动力与阻力作用在支点两侧时,弹簧测力计应竖直向 拉杠杆(后两空均选填“上”或“下”)。
11.列车上有出售食品的手推车(如图所示)。若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 (写出字母);当后轮遇到障碍物A时,售货员竖直向上提扶把,这时支点是 。手推车可以视为 杠杆。
12.如图所示,轻质杠杆OB可绕O点转动,OA的长0.3米,AB的长0.1米,B点处挂一个重力为3牛的重物,A点处加一个竖直向上的力F,杠杆在水平位置平衡,则力F大小为 牛,这是 杠杆(选填“省力”或“费力”)。
13.如图所示,一轻质杠杆可绕O点转动,将A、B两个物体分别用细线悬挂在杠杆的两端,杠杆在水平位置平衡,已知A物体的质量为m,l1>l2。求:
(1)物体B的重力GB为 (结果请用所给的物理量符号表示)。
(2)小红设想在A、B下同时挂上相同质量的小物块,也能使杠杆保持水平平衡,请问她的方案是 (选填“一定可行”、“一定不可行”或“可能可行”)本空不需要过程。
14.在图中,O为支点,B点处挂着物体重为12牛,杠杆自身重力忽略不计。要使杠杆水平平衡,在F点最小应加 牛的拉力,方向为 ,使杠杆水平平衡最小的拉力是作用在 点。
三、作图题
15.如图所示,轻质杠杆的A点挂一重物,O为杠杆的支点。请画出使杠杆在此位置平衡时所施加的最小动力F1的示意图。
16.在图中,画出静止在水平桌面上物体受到重力G的示意图。
17.画出力F的力臂,并标上字母L。
四、实验题
18.在探究“杠杆的平衡条件”的实验中:
(1)所用的实验器材有带刻度的杠杆、铁架台、钩码、线(弹簧夹)和 等。需要测量的物理量是动力、 、动力臂和 。
(2)杠杆静止在图所示位置。此时应将螺母向 调节,使杠杆在 位置平衡,目的是 。此后实验过程中, (选填“能”或“不能”)再旋动两端螺母。
(3)如图所示已挂上两个钩码,可在A位置挂上 个钩码,使杠杆在水平位置平衡。
(4)实验中改变力和力臂多次测量的目的是 。
A.减小误差 B.控制变量 C.得到普遍规律
19.在“探究杠杆平衡条件”的实验中:
(1)如图甲,把质量分布均匀的杠杆中点O作为支点,其目的是消除 对实验的影响。为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的 。
(2)图乙中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动 格。当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 力。
(3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,弹簧测计示数 (选填“大于”、“小于”或“等于”)1N,如果竖直向上拉动弹簧测力计,它是 杠杆(选填“省力”、“费力”或“等臂”)(每个钩码重0.5N)。
20.在探究杠杆平衡条件的实验中:
(1)如图1所示,若杠杆在使用前左端低、右端高,要使它在水平位置平衡,应将杠杆右端的螺母向 (选填“左”或“右”)调节至平衡。杠杆平衡后,在整个实验过程中, (选填“可以”或“不可以”)再旋动两侧的螺母。
(2)下列实验步骤中:
A.将杠杆放在支架上,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
B.计算每次实验中F1L1和F2L2的大小,根据计算结果得出杠杆的平衡条件。
C.再次改变钩码的个数或位置,重复实验。
D.记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中。
E.将钩码挂在杠杆的两边,改变钩码的位置,使杠杆在水平位置重新平衡。
正确的顺序是 (填字母)。
(3)每个钩码重1N,杠杆上每格长度是4cm。如表是某同学记录的实验数据。
次数 F1/N L1/cm F2/N L2/cm
1 1 8 2 4
2 2 8 1 16
3 2 12 3 8
分析上述数据,可得出的杠杆的平衡条件是: 。
(4)若杠杆如图2所示静止不动,此时杠杆处于 (选填“平衡”或“不平衡”)状态,但 (选填“能”或“不能”)测量相关数据、得出实验结论。
(5)如图3所示,杠杆在水平位置平衡,如果这时在两侧钩码下各增加一个相同的钩码,杠杆的 端(选填“左”或“右”)将下沉。
五、综合题
21.如图,质量分布均匀的圆柱体木棒左端与支点O连接,绕O转动时,木棒所受的摩擦可忽略不计。现木棒右端受到竖直向上的拉力F而保持静止。
(1)若把该木棒看作一个杠杆,则此杠杆是否处于平衡状态?
答: (选填“是”或“否”),判断的依据是 。
(2)若以F为杠杆的动力,木棒所受的重力为阻力,请在图中画出拉力F的力臂L1和重力G及其力臂L2,根据 可判断此杠杆为 (“省力”、“费力”或“等臂”)杠杆。
22.如图甲所示的独轮车是生活中搬运泥土轻便工具,某次搬运泥土时,车体和泥土的总重G=1000N,运泥土时从A点提起独轮车把手。图乙为独轮车被抬起到某位置静止时的示意图,已知:AO=1.2m,C为OB连线上一点,OC=0.3m,OB=1m。
(1)独轮车可看作是一个 (选填“省力”或“费力”)杠杆。
(2)图乙所示位置时,手需要提供的最小拉力F为 N;若继续向上拉动,所需最小拉力将 (选填“变大”、“变小”或“不变”)。
(3)为了更轻便,可以把车厢内泥土适当向 (选填“左”或“右”)移。
人教版八年级下册《12.1 杠杆》2021年同步练习卷
参考答案与试题解析
一、选择题
1.如图所示,O为杠杆AB的支点,B点挂一重物G,若在A点分别施加F1、F2、F3、F4四个力,其中能使杠杆在水平位置平衡的最小的力是( )
A.F1 B.F2 C.F3 D.F4
解:
由图可知,动力F4、F2都与OA垂直,则动力F4和F2对应的动力臂就是OA,它是最长的动力臂;
由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;因为F4和F2对应的动力臂最长,所以F4和F2最小;
为使杠杆平衡时,动力和阻力的转动效果是相反的,左边的阻力使杠杆有逆时针转动的效果,则右边的动力应有使杠杆顺时针转动的效果,即动力的方向应向下,所以可判断最小的力是F2。
故选:B。
2.如图所示的工具中,正常使用时属于省力杠杆的是( )
A.筷子 B. 碗夹
C. 镊子 D.起子
解:
ABC、筷子、碗夹、镊子在使用过程中,动力臂小于阻力臂,是费力杠杆;
D、起子在使用过程中,动力臂大于阻力臂,是省力杠杆。
故选:D。
3.如图,裤架上的两个夹子分别夹住一条毛巾以下方法能使裤架在水平位置平衡的是( )
A.右边夹子向左移动
B.左边夹子向右移动
C.右边毛巾的下角夹在左边夹子上
D.以上都不正确
解:
A、右边夹子向左移动,右端的力不变,力臂变小,右端力和力臂的乘积更小,裤架会更向左倾斜,故A错误。
B、左边夹子向右移动,右端的力不变,力臂变大,右端力和力臂乘积更大,裤架会向右倾斜,能在水平位置平衡,故B正确。
C、右边毛巾的下角夹在左边夹子上,相当于右端减小了重力,左端增加了重力,导致左端力和力臂乘积更大,右端力和力臂的乘积更小,裤架会更向左倾斜,故C错误。
D、综上所述,故D错误。
故选:B。
4.如图所示,轻质杠杆AC可以绕O点转动,AO:OB=3:1,甲、乙两物体重均为300N,甲的底面积为4cm2,杠杆始终保持水平平衡,下列说法正确的是( )
A.甲对地面的压强为5×105Pa
B.地面对甲的支持力为100N
C.A端受到甲的拉力为200N
D.物体乙从B点向C点移动过程中,甲对地面的压强逐渐增大
解:(1)由杠杆平衡条件可得:FA×OA=G乙×OB,则A端受到甲的拉力:FA===100N,故C错误;
甲受到竖直向上的支持力、拉力以及竖直向下的重力,甲静止,因此F支持力+FA=G甲,即F支持力=G甲﹣FA=300N﹣100N=200N,故B错误;
由于力的作用是相互的,所以甲对地面的压力:F=F支持力=200N,
故甲对地面的压强:p===5×105Pa,故A正确;
(2)根据图示可知,物体乙从B点向C点移动过程中,其力臂逐渐增大,由杠杆平衡条件可知,A端受到的拉力逐渐变大,则地面对甲的支持力逐渐变小,故甲对地面的压力变小,由p=可知,甲对地面的压强逐渐变小,故D错误。
故选:A。
5.如图是生活中常见的吸盘式杠杆,将吸盘压在墙壁上,排出内部空气,就能将挂杆固定。挂有重物的挂钩沿光滑水平杆从P点开始向B移动,若吸盘、挂钩与杆的重力及挂钩大小忽略不计,则吸盘B受到的摩擦力F的大小与挂钩到A之间的距离l的关系图像为( )
A. B.
C. D.
解:以吸盘A为支点,设挂钩与吸盘A的距离为l,
根据杠杆的平衡条件可得:G×l=F×AB,
则F=,AB、G不变,l不为零,由于此算式成正比例关系,所以经过原点,故吸盘B受到的摩擦力F的大小与l的关系图像为D。
故选:D。
6.如图所示为究杠杆平衡条件的实验装置,若每个码重0.5N,为了让杠杆在水平位置平衡,下列判断中正确的是( )
A.在A点挂4个钩码能使杠杆平衡
B.在B点用弹簧测力计竖直向下拉,当示数为0.5N时,能使杠杆平衡
C.用弹簧测力计在B点拉,无论如何改变用力方向都可省力
D.用弹簧测力计在A点拉,无论如何改变用力方向都要费力
解:每个钩码重力为0.5N,设每个小格长度为L,则支点左侧力与力臂的乘积为:1N×3L=3N×L;
A、在A点挂4个钩码时,杠杆右侧力与力臂的积为:2N×2L=4N×L>3N×L,杠杆不能平衡,故A错误;
B、在B点用弹簧测力计竖直向下拉,当示数为0.5N时,杠杆右侧力与力臂的积为:0.5N×5L=2.5N×L<3N×L,杠杆不能平衡,故B错误;
C、用弹簧测力计在B点用弹簧测力计竖直向下拉,根据杠杆平衡条件知,1N×3L=F×5L,最小拉力为0.6N;当力的方向改变时,力臂减小,使力臂小于3L时,拉力要大于1N,杠杆费力,用弹簧测力计在B点拉,当力臂为3L时,拉力为1N.根据杠杆平衡条件知,当改变用力方向,使力臂小于3L时,拉力要大于1N,杠杆才能平衡,要费力,故C错误;
D、用弹簧测力计在A点用弹簧测力计竖直向下拉,根据杠杆平衡条件知,1N×3L=F×2L,最小拉力为1.5N;当力的方向改变时,力臂减小,无论如何改变用力方向力都要大于1.5N,都要费力,故D正确。
故选:D。
7.在探究“杠杆平衡条件”的实验中,杠杆在力F作用下水平平衡,如图所示,现将弹簧测力计绕B点从位置a转到位置b过程中,杠杆始终保持水平平衡,则拉力F的变化情况是( )
A.一直变小 B.一直不变
C.一直变大 D.先变小后变大
解:将弹簧测力计绕B点从a位置转动到b位置的过程中,钩码的重力不变,其力臂不变,即阻力与阻力臂的乘积不变;
将弹簧测力计绕B点从a位置转动到b位置的过程中,拉力F的力臂逐渐变小,由杠杆的平衡条件F1L1=F2L2可知,拉力F逐渐变大。
故选:C。
8.如图所示为等刻度的轻质杠杆,在A处挂一个重为2牛的物体,若要使杠杆在水平位置平衡,则在B处施加的力( )
A.可能是2牛 B.可能是0.5牛
C.一定是1牛 D.一定是4牛
解:设杠杆每一格长度是L,
当B处的作用力与杠杆垂直时,力臂最大,此时作用力最小,
由杠杆平衡条件可得:FALA=FB最小LB,即:2N×2L=FB最小×4L,
则FB最小=1N,当作用在B处的力与杠杆不垂直时,力臂小于4L,
作用力大于1N,因此要使杠杆平衡,作用在B处的力F≥1N,故BCD错误、A正确。
故选:A。
二、填空题
9.如图所示,已知物体G重力为24N,AO=5cm,AB=10cm。当轻质杠杆在水平位置平衡时,拉力F大小等于 12 牛;若拉力F绕B点逆时针旋转30度角,杠杆仍能水平平衡,则拉力F将 变大 (选填“变大”、“变小”或“不变”);若想再省力些,可以将物体G 靠近 (选填“靠近”或“远离”)支点一些。
解:(1)根据杠杆平衡条件可得:G×OA=F×OB,
所以拉力大小为F===12N;
(2)拉力F绕B点逆时针旋转30度角,杠杆仍能水平平衡,阻力和阻力臂不变,动力臂减小,则力F的大小将变大
若想再省力些,将物体G向O点靠近,阻力臂减小,根据杠杆平衡条件F1L1=F2L2可知,阻力和动力臂不变,阻力臂减小,则力F的大小将变小。
故答案为:12;变大;靠近。
10.在做“探究杠杆平衡的条件”实验中,所用的实验器材有:带刻度的杠杆、支架、 弹簧测力计 、细线、钩码等。实验前,杠杆静止在如图所示位置,此时杠杆处于 平衡 状态(选填“平衡”或“不平衡”)。为了便于直接从杠杆上读出 力臂 的数值,使杠杆在水平位置平衡,应向 右 调节平衡螺母(选填“左”或“右”),在挂上钩码后,应调节钩码的个数或 钩码位置 ,使杠杆仍在水平位置平衡。若用钩码和弹簧测力计来使杠杆水平平衡时,当动力与阻力作用在支点同侧时,弹簧测力计应竖直向 上 拉杠杆;当动力与阻力作用在支点两侧时,弹簧测力计应竖直向 下 拉杠杆(后两空均选填“上”或“下”)。
解:
(1)实验时要用弹簧测力计测量力的大小,实验时要使用弹簧测力计;
(2)实验前,杠杆静止在如图所示位置,此时杠杆静止,处于平衡状态;
为了便于直接从杠杆上读出力臂的数值,使杠杆在水平位置平衡,杠杆左端低,应向右调节平衡螺母;在挂上钩码后,应调节钩码的个数或钩码位置,使杠杆仍在水平位置平衡;
(3)用钩码和弹簧测力计来使杠杆水平平衡时,当动力与阻力作用在支点同侧时,在杠杆的同侧施加相反方向的力,弹簧测力计应竖直向上拉杠杆;当动力与阻力作用在支点两侧时,在杠杆的两侧施加相同方向的力,弹簧测力计应竖直向下拉杠杆。
故答案为:弹簧测力计;平衡;力臂;右;钩码位置;上;下。
11.列车上有出售食品的手推车(如图所示)。若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是 C (写出字母);当后轮遇到障碍物A时,售货员竖直向上提扶把,这时支点是 。手推车可以视为 省力 杠杆。
解:(1)当前轮遇到障碍物A时,售货员向下压扶手,手推车可看作杠杆,手推车绕着C点转动,C是支点;
当后轮遇到障碍时,售货员向上提扶手,手推车绕着B点转动,B是支点;
(2)当后轮遇到障碍物A时,支点是B点,当前轮遇到障碍物A时,C是支点,在这两种情况下,阻力(手推车重力)与阻力臂相等,后轮遇到障碍物时的动力臂大于前轮遇到障碍物时的动力臂,由杠杆平衡条件可知,在阻力与阻力臂一定时,动力臂越大,动力越小,因此与前轮遇到障碍物时相比,此时较省力。
故答案为:C;B;省力。
12.如图所示,轻质杠杆OB可绕O点转动,OA的长0.3米,AB的长0.1米,B点处挂一个重力为3牛的重物,A点处加一个竖直向上的力F,杠杆在水平位置平衡,则力F大小为 4 牛,这是 费力 杠杆(选填“省力”或“费力”)。
解:由杠杆平衡的条件可得:F×OA=G×OB,
即F×0.3m=3N×(0.3m+0.1m)
解得:F=4N;
此杠杆动力大于阻力,属于费力杠杆。
故答案为:4;费力。
13.如图所示,一轻质杠杆可绕O点转动,将A、B两个物体分别用细线悬挂在杠杆的两端,杠杆在水平位置平衡,已知A物体的质量为m,l1>l2。求:
(1)物体B的重力GB为 (结果请用所给的物理量符号表示)。
(2)小红设想在A、B下同时挂上相同质量的小物块,也能使杠杆保持水平平衡,请问她的方案是 一定不可行 (选填“一定可行”、“一定不可行”或“可能可行”)本空不需要过程。
解:(1)将A、B两个物体分别用细线悬挂在杠杆的两端,杠杆在水平位置平衡,根据杠杆的平衡条件可知:GAl1=GBl2,物体B的重力为:GB==;
(2)在A、B下同时挂上相同质量的小物块,设小物块的质量为m';
支点左侧力与力臂的乘积为:(GA+m'g)l1=GAl1+m'gl1;
支点右侧力与力臂的乘积为:(GB+m'g)l2=GBl2+m'gl2;
根据l1>l2可知,m'gl1>m'gl2;由于GAl1=GBl2,所以GAl1+m'gl1>GBl2+m'gl2;此时的杠杆一定不能平衡。
故答案为:(1);(2)一定不可行。
14.在图中,O为支点,B点处挂着物体重为12牛,杠杆自身重力忽略不计。要使杠杆水平平衡,在F点最小应加 4 牛的拉力,方向为 竖直向上 ,使杠杆水平平衡最小的拉力是作用在 I 点。
解:(1)由杠杆平衡条件可知,在阻力跟阻力臂的乘积一定时,动力臂越长,动力越小。
由图可知,当力的方向跟杠杆OF垂直向上(竖直向上)时动力臂最长、动力最小;
由杠杆平衡条件得:F×OF=G×LG,
所以F===4N;
(2)由杠杆平衡条件可知,在阻力跟阻力臂的乘积一定时,动力臂越长,动力越小。
由图可知,当动力臂为OI时最长、动力最小,故使杠杆水平平衡最小的拉力是作用在I点。
故答案为:4;竖直向上;I。
三、作图题
15.如图所示,轻质杠杆的A点挂一重物,O为杠杆的支点。请画出使杠杆在此位置平衡时所施加的最小动力F1的示意图。
解:在杠杆的最右端B点施加力,并且垂直OB向上,此时动力臂最大,而阻力、阻力臂一定,由杠杆平衡条件可知此时最省力、用力最小;
因为阻力方向竖直向下,为使杠杆平衡,则动力方向向上,如图所示:
16.在图中,画出静止在水平桌面上物体受到重力G的示意图。
解:重力的方向是竖直向下的,过重心画一条带箭头的竖直向下的有向线段,用G表示,如图所示:
17.画出力F的力臂,并标上字母L。
解:图中O为支点,反向延长力F画出力的作用线,然后由支点O向F的作用线作垂线,垂线段的长度L为F的力臂,如图所示:
四、实验题
18.在探究“杠杆的平衡条件”的实验中:
(1)所用的实验器材有带刻度的杠杆、铁架台、钩码、线(弹簧夹)和 弹簧测力计 等。需要测量的物理量是动力、 阻力 、动力臂和 阻力臂 。
(2)杠杆静止在图所示位置。此时应将螺母向 右 调节,使杠杆在 水平 位置平衡,目的是 便于测量力臂 。此后实验过程中, 不能 (选填“能”或“不能”)再旋动两端螺母。
(3)如图所示已挂上两个钩码,可在A位置挂上 3 个钩码,使杠杆在水平位置平衡。
(4)实验中改变力和力臂多次测量的目的是 C 。
A.减小误差 B.控制变量 C.得到普遍规律
解:(1)探究杠杆平衡的条件时,要利用弹簧测力计测量力的大小,故还需要弹簧测力计;
需要测量的物理量是动力、阻力、动力臂、阻力臂;
(2)杠杆静止在图所示位置。杠杆左端低,说明重心偏左,为了使它在水平位置平衡,应将杠杆平衡螺母向右调节,目的是便于测量力臂;
(3)根据杠杆平衡的条件,F1×L1=F2×L2,
2G×3L=nG×2L解得n=3,
可在A位置挂3个钩码,使杠杆在水平位置平衡;
(4)多次改变力和力臂的大小,得到了多组实验数据,得出了杠杆平衡条件。该实验测多组数据的目的是为了得出的结论更具有普遍性,故选C。
故答案为:(1)弹簧测力计;阻力;阻力臂;(2)右;水平;便于测量力臂;不能;(3)3;(4)C。
19.在“探究杠杆平衡条件”的实验中:
(1)如图甲,把质量分布均匀的杠杆中点O作为支点,其目的是消除 杠杆自重 对实验的影响。为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的 运动状态 。
(2)图乙中杠杆恰好处于水平位置平衡,若在A处下方再挂一个相同的钩码,为使杠杆保持水平平衡,需将挂在B处的钩码向右移动 1 格。当杠杆平衡、钩码静止时,挂在A处的钩码所受重力和钩码所受拉力是一对 平衡 力。
(3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,弹簧测计示数 大于 (选填“大于”、“小于”或“等于”)1N,如果竖直向上拉动弹簧测力计,它是 省力 杠杆(选填“省力”、“费力”或“等臂”)(每个钩码重0.5N)。
解:(1)把质量分布均匀的杠杆中点置于支架上,杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响;
为了方便直接测出力臂,实验前应先调节杠杆在水平位置平衡,当在A处挂上钩码后杠杆转动,说明力能改变物体的运动状态;
(2)设一个钩码重为G,一格的长度为L;根据杠杆的平衡条件可得:4G×2L=2G×nL,
解得:n=4,故应该将B处所挂钩码须向右移动4﹣3=1格;
静止的钩码处于平衡状态,受到的重力和对钩码的拉力是一对平衡力。
(3)如图丙,小明取下B处钩码,改用弹簧测力计钩在C处,使杠杆再次在水平位置平衡,根据杠杆的平衡条件,弹簧测计示数:
F==2G=2×0.5N=1N,
由于弹簧测力计拉力F的力臂小于4L,故F大于1N;如果竖直向上拉动弹簧测力计,弹簧测力计力的力臂大于钩码的力臂,故它是省力杠杆;
故答案为:(1)杠杆自重;运动状态;(2)1;平衡;(3)大于;省力。
20.在探究杠杆平衡条件的实验中:
(1)如图1所示,若杠杆在使用前左端低、右端高,要使它在水平位置平衡,应将杠杆右端的螺母向 右 (选填“左”或“右”)调节至平衡。杠杆平衡后,在整个实验过程中, 不可以 (选填“可以”或“不可以”)再旋动两侧的螺母。
(2)下列实验步骤中:
A.将杠杆放在支架上,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
B.计算每次实验中F1L1和F2L2的大小,根据计算结果得出杠杆的平衡条件。
C.再次改变钩码的个数或位置,重复实验。
D.记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中。
E.将钩码挂在杠杆的两边,改变钩码的位置,使杠杆在水平位置重新平衡。
正确的顺序是 AEDCB (填字母)。
(3)每个钩码重1N,杠杆上每格长度是4cm。如表是某同学记录的实验数据。
次数 F1/N L1/cm F2/N L2/cm
1 1 8 2 4
2 2 8 1 16
3 2 12 3 8
分析上述数据,可得出的杠杆的平衡条件是: 动力×动力臂=阻力×阻力臂(或F1L1=F2L2) 。
(4)若杠杆如图2所示静止不动,此时杠杆处于 平衡 (选填“平衡”或“不平衡”)状态,但 不能 (选填“能”或“不能”)测量相关数据、得出实验结论。
(5)如图3所示,杠杆在水平位置平衡,如果这时在两侧钩码下各增加一个相同的钩码,杠杆的 左 端(选填“左”或“右”)将下沉。
解:(1)在使用此杠杆前发现左端低,右端高,说明杠杆的重心偏左,要使它在水平位置平衡,左、右两端的螺母(或一端的螺母)都要向杠杆上翘的右端调节。所以可以将杠杆右端的平衡螺母向右调节,也可以将左端的平衡螺母向右调节,此后,在整个实验过程中,螺母再调节会改变杠杆重心的位置,使杠杆重力对杠杆平衡又产生影响,因此不能再旋动两侧的平衡螺母;
(2)经分析,探究杠杆平衡的步骤为:
A、调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
E、将钩码挂在杠杆的支上点两边,先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置重新平衡。
D、记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中。
C、改变钩码的个数和位置,重复实验。
B、计算每次实验中F1L1和F2L2的大小,根据计算结果得出杠杆的平衡条件。
故正确的顺序是:AEDCB;
(3)由表格中数据知,动力、动力臂的乘积等于阻力、阻力臂的乘积,可得杠杆平衡条件是:F1L1=F2L2;
(4)实验前,杠杆静止在如图甲所示的位置,杠杆静止,此时杠杆处于平衡状态;为了便于测量力臂,应使杠杆在水平位置平衡,由图甲可知,杠杆右端偏高,不能测量相关数据、得出实验结论;
(5)如图,杠杆在水平位置平衡,如果这时在两侧钩码下各增加一个相同的钩码,每个钩码重1N,杠杆上每格长度是Lcm,3GN×3Lcm>4GN×2Lcm,
所以F1l1>F2l2,所以杠杆的左端下沉。
故答案为:(1)右;不可以;(2)AEDCB;(3)动力×动力臂=阻力×阻力臂(或F1L1=F2L2);(4)平衡;不能;(5)左。
五、综合题
21.如图,质量分布均匀的圆柱体木棒左端与支点O连接,绕O转动时,木棒所受的摩擦可忽略不计。现木棒右端受到竖直向上的拉力F而保持静止。
(1)若把该木棒看作一个杠杆,则此杠杆是否处于平衡状态?
答: 是 (选填“是”或“否”),判断的依据是 杠杆处于静止状态 。
(2)若以F为杠杆的动力,木棒所受的重力为阻力,请在图中画出拉力F的力臂L1和重力G及其力臂L2,根据 动力臂大于阻力臂 可判断此杠杆为 省力 (“省力”、“费力”或“等臂”)杠杆。
解:(1)根据图可知,木棒右端受到竖直向上的拉力F而保持静止,因此此时的杠杆是平衡状态;
(2)木棒所受的重力G的方向是竖直向下的,作用在杠杆的中心上;从支点分别做F和G的力的作用线的垂线,该垂线段为力臂;如图所示:
由图可知,此时的动力臂大于阻力臂,为省力杠杆。
故答案为:(1)是;杠杆处于静止状态;(2)如图;动力臂大于阻力臂;省力。
22.如图甲所示的独轮车是生活中搬运泥土轻便工具,某次搬运泥土时,车体和泥土的总重G=1000N,运泥土时从A点提起独轮车把手。图乙为独轮车被抬起到某位置静止时的示意图,已知:AO=1.2m,C为OB连线上一点,OC=0.3m,OB=1m。
(1)独轮车可看作是一个 省力 (选填“省力”或“费力”)杠杆。
(2)图乙所示位置时,手需要提供的最小拉力F为 250 N;若继续向上拉动,所需最小拉力将 变小 (选填“变大”、“变小”或“不变”)。
(3)为了更轻便,可以把车厢内泥土适当向 左 (选填“左”或“右”)移。
解:
(1)因为独轮车在使用过程中,动力臂大于阻力臂,所以是省力杠杆;
(2)根据杠杆的平衡条件,在阻力和阻力臂不变的情况下,当动力臂最长时,最省力,故当在A点垂直于OA的方向上用力,此时动力臂最长(即OA),最省力,由杠杆平衡条件可得F×OA=G×OC,即F×1.2m=1000N×0.3m,解得F=250N;
若继续向上拉动,动力臂不变(等于OA),阻力臂(重力的力臂)减小,阻力G不变,根据杠杆的平衡条件F1L1=F2L2可知,所需最小拉力将变小;
(3)为了更轻便,可以把车厢内泥土适当向左移动,减小了阻力臂,动力也会减小,能达到省力的目的。
故答案为:(1)省力;(2)250;变小;(3)左。
第1页(共3页)