11.1杠杆 课件-2021-2022学年九年级物理苏科版上册(43张PPT)
文档属性
| 名称 | 11.1杠杆 课件-2021-2022学年九年级物理苏科版上册(43张PPT) |

|
|
| 格式 | pptx | ||
| 文件大小 | 7.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2021-06-21 00:00:00 | ||
图片预览








文档简介
复杂的机器是由简单机械组成的
第十一章简单机械和功
一、杠杆
11.1 拔图钉
探究:木板上钉了一只图钉,你能用手把他拔出来吗?你可以用那些方法工具将图钉拔出来?比一比谁的方法好?
生活中还有类似的工具吗?
思考:这些工具自身都具有哪些共同特点?
有一定长度,外形各异,但整体受力不易形变的硬棒,有固不动的点
认识杠杆
总结归纳:这些工具在工作时共同的特点
让我想一想?
有力的作用
绕一固定点转动
硬棒
杠杆:
将一根在力的作用下可绕一
固定点转动的硬棒称做杠杆。
在物理学中
【思考】
A、支点(O)
B、动力(F1)
C、阻力(F2)
D、动力臂(l1)
E、阻力臂(l2)
【五要素】
1、支点的位置能不能落在杠杆的两端?
2、如何确定杠杆上的动力和阻力?
3、力臂的大小( l )与支点到力的作用点的那段距离( L )之间有什么关系?
( l ≤ L )
(顺逆原则)
l1
l2
O
F1
F2
作用在杠杆的力使其转动的
效果跟哪些因素有关?
支点O
动力臂l1
阻力臂l2
动力F1
阻力F2
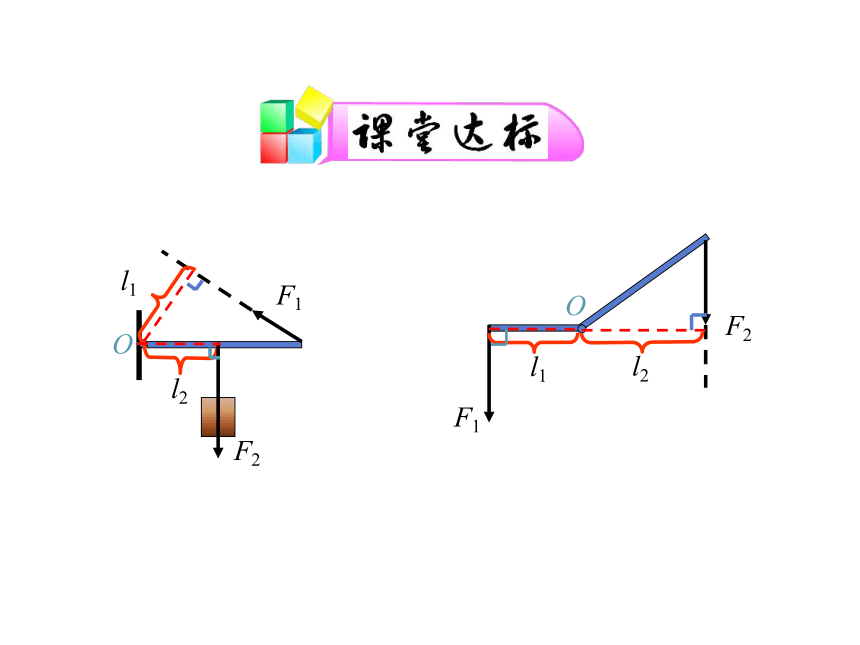
∟
∟
力臂的作法
找出支点的位置
从支点作动力、阻力作用线的垂线
确定动力、阻力作用线
标垂足,定力臂
F1
F2
l1
l2
F1
F2
l1
O
l2
O
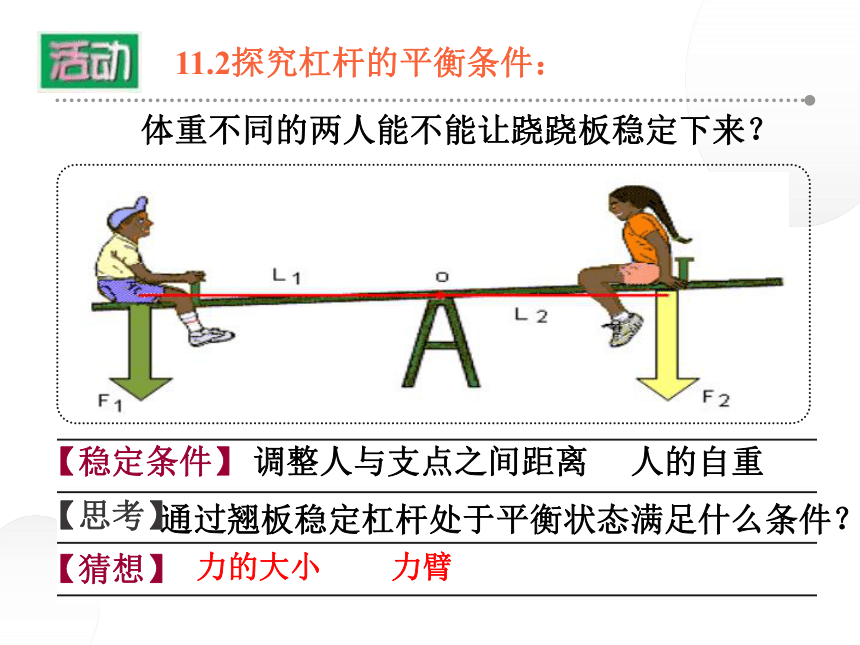
调整人与支点之间距离 人的自重
【稳定条件】
通过翘板稳定杠杆处于平衡状态满足什么条件?
力的大小 力臂
体重不同的两人能不能让跷跷板稳定下来?
【思考】
【猜想】
11.2探究杠杆的平衡条件:
如图杠杆是不是平衡状态?
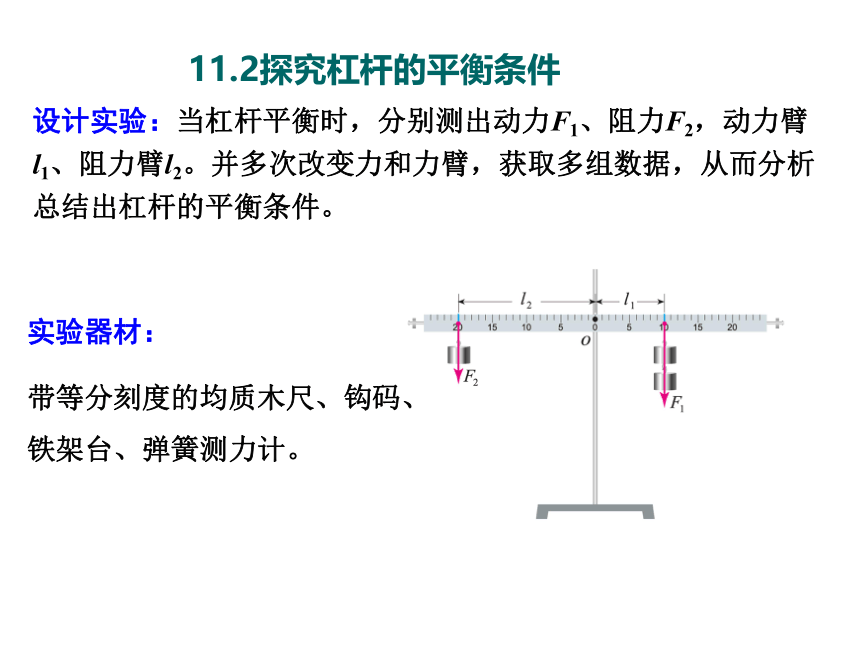
11.2探究杠杆的平衡条件
杠杆平衡:杠杆在动力和阻力作用下静止时,我们就说杠杆平衡。
设计实验:当杠杆平衡时,分别测出动力F1、阻力F2,动力臂l1、阻力臂l2。并多次改变力和力臂,获取多组数据,从而分析总结出杠杆的平衡条件。
实验器材:
带等分刻度的均质木尺、钩码、铁架台、弹簧测力计。
11.2探究杠杆的平衡条件
实验步骤:
(1)调节平衡螺母,使杠杆水平平衡.
调平衡螺母方法:左高左调
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡.将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中.
目的:使杠杆的重力作用线通过杠杆支点,避免杠杆自身重力
对杠杆平衡的影响。
保证力臂沿杠杆,便于测量力臂。
(3)改变阻力和阻力臂的大小,相应调节动力和动力
臂的大小,再做几次实验.
目的:使实验结论具有普遍性。
(4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡.将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中.
实验步骤:
第三次实验测量弹簧测力计为竖直方向示数为多少,如向左或者右倾斜示数会出现什么变化?得出最小动力的画法?
步骤4为什么与前两次实不同?
实验次数
动力F1/N
动力臂l1/cm
阻力F2/N
阻力臂l2/cm
1
0.5
20
1
10
2
1
20
4
5
3
0.6
20
1
10
F1?L1
F2?L2
合作探究:
合作完成探究杠杆的平衡条件的实验,将实验数据计入表格,分析论证,得出结论准备展示
杠杆平衡时,动力×动力臂=阻力×阻力臂。
动力×动力臂=阻力×阻力臂
F1 L1 = F2 L2
F2
F1
L1
L2
杠杆的平衡条件:
实验反思
1. 为什么要调节杠杆在水平位置平衡?
2. 为什么要进行多次实验探究?
(消除杠杆自重的影响)
(便于测量相应的力臂)
(避免巧合得到普遍规律)
杠杆的平衡条件:
【内容】
【公式】
【拓展】
【思考】
杠杆平衡原理:
动力乘以动力臂等于阻力乘以阻力臂
F1l1=F2l2
杠杆受多个动(阻)力的平衡条件是什么呢?
给我一个支点和一根足够长的硬
棒,我就能撬动地球。
——阿基米德
F1l1+ Fnln =F2l2 + Fmlm
?F1l1=?F2l2
阿基米德撬地球的杠杆应该有什么特点呢?
实验反思
例题 据《杭州日报》报道,2001年6月22日,在杭州动物园内,一位物理老师利用杠杆原理,仅用小小的弹簧测力计就测出了一头大象的质量。测量时利用了根长度为12m的槽钢作为杠杆。吊钩固定于槽钢的中点O。当槽钢水平静止时,弹簧测力计示数F1为200N。测得l1为6m,l2为4cm。若不计铁笼的质量,请估算大象的质量。g取10N/kg。
O
l1=6m
l2=4cm
F1=200N
F2
例题:
由F1l1=F2l2 得:
解:
F2
=
F1 l1
l2
=
200N×6m
0.04m
=3×104N
m
=
F2
g
=
10N/kg
3×104N
=3×103kg=3t
=
G
g
O
F1
F2
l1
l2
你认为图中的杠杆 在使用时效果相同吗?
F1
F2
l1
l2
O
O
F1
F2
l1
l2
O
l2
l1
F1
F2
生活中的杠杆
观察与思考
1
省力杠杆
省力杠杆有哪些特点?
杠杆的分类:
【省力杠杆】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
压水井手柄等
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
O
F2
F1
A
B
F2
F1
A’
B’
可见,省力杠杆虽然省力,但费了距离。
所以省力杠杆又可称为____杠杆
省力杠杆的特点
若克服的阻力较大时,要用省力杠杆。
省力杠杆
2
费力杠杆
【费力杠杆】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
笤帚
筷子
费力杠杆有哪些特点?
镊子
F2
F1
h
S=4h
A’
B’
A
B
F2
F1
O
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
可见,费力杠杆虽然费了力,但可以省距离。
所以费力杠杆右可称为____杠杆。
费力杠杆的特点
若克服的阻力较小时,要用费力杠杆。
使用费力杠杆,可以省距离。
能使工作快捷。
费力杠杆
3
等臂杠杆
天平如果不等臂怎么修正?
【等臂杠杆】
【特点】
动力臂等于阻力臂
动力等于阻力,
不费力不省距离
【实例】
天平等
(等量替代)
杠杆的种类:省力杠杆、费力杠杆、等臂杠杆。
应 用
杠杆缺点
杠杆优点
杠杆特点
杠杆类型
等臂杠杆
费力杠杆
省力杠杆
L1>L2,F1(动力<阻力)
L1F2
(动力>阻力)
L1=L2,F1=F2
(动力=阻力)
省力
省距离
既不省力也不省距离
费距离
费 力
等臂杠杆
费力杠杆
请对下列器具应用的杠杆进行分类:
费力杠杆
省力杠杆
费力杠杆
省力杠杆
费力杠杆
费力杠杆
【平衡要素的计算】
例、扁担长2m,两端物体的质量
分别为50kg和30kg。若不考虑扁
担的重力。人的肩头应在什么位
置,扁担才平衡?
【解】
F1l1=F2l2
m1gAO=m2g(AB-AO)
50kgAO=30kg(2m-AO)
解之得:AO=0.75m
肩头离A端0.75m处,扁担可保持平衡。
【答】
【动态平衡的分析1】
例、如图所示,一个轻质杠杆可绕轴O转动,在直杆的中点挂一重物,在杆的另一端施加一个动力F,将直杆从右下位置慢慢抬起到水平位置过程中,
力F大小的变化情况是 ( )
A.一直增大 B.一直减小
C.保持不变 D.无法确定
【最小动力的确定1】
【方法】
1、合理确定支点O和动力作用点
3、作动力作用线,判断阻力作用效果
2、连线支点和动力作用点为最大动力臂
4、根据“顺逆原则”确定动力方向
【最小动力的确定2】
可见,杠杆这一简单机械依然具有重要的价值
生活 物理 社会
人体中的杠杆
(2021宁夏)如图是同学们常用的燕尾夹,AB=BC,当用力摁住C点打开该夹子时,可把______点看作支点,此时夹子可近似看作________杠杆(选填“省力”“费力”或“等臂”).
(2021甘孜州)如图9所示,某同学用完全相同的钩码验证杠杆的平衡条件。杠杆调节平衡后,在杠杆上A点处挂4个钩码,为使杠杆重新平衡,应在B点处挂__▲ 个钩码; 如果A、B两处再各挂一个钩码, 杠杆的__▲ (选填 “左”或“右”)端会下沉。
(2020雅安)如图所示,杆秤秤砣的质量为0.2kg,杆秤自身质量忽略不计,若杆秤水平静止时,被测物体和秤砣到秤纽的距离分别为0.05m和0.2m,则被测物体的质量为__kg,若秤砣上粘有油污,则测量值比被测物体的真实质量要____(选填 “偏大”或“偏小”)
(2020南京)如图是过去农村用的舂米工具的结构示意图。O为固定转轴,A处连接着石球,脚踏杆的B处可使石球升高,抬起脚,石球会落下去击打稻谷。石球重50N,不计摩擦和杆重。
(1)脚沿与杆垂直方向至少用力F1才能将石球抬起。F1的力臂为______m,此时舂米工具是一个______(选填“省力”或“费力”)杠杆;
(2)脚竖直向下至少用力F2为______N,才能将石球抬起,F2和F1的大小关系为F2______F1。
(2021安徽)停车场入口处常用横杆来控制车辆的进出 ,如图甲所示。我们可以把该装置简化成如图乙所示的杠杆。若横杆AB粗细相同、质量分布均匀,重G=120N,AB=2.8m ,AO=0.3。要使横杆AB保持水平平衡,需在A端施加竖直向下的力F=________N。
第十一章简单机械和功
一、杠杆
11.1 拔图钉
探究:木板上钉了一只图钉,你能用手把他拔出来吗?你可以用那些方法工具将图钉拔出来?比一比谁的方法好?
生活中还有类似的工具吗?
思考:这些工具自身都具有哪些共同特点?
有一定长度,外形各异,但整体受力不易形变的硬棒,有固不动的点
认识杠杆
总结归纳:这些工具在工作时共同的特点
让我想一想?
有力的作用
绕一固定点转动
硬棒
杠杆:
将一根在力的作用下可绕一
固定点转动的硬棒称做杠杆。
在物理学中
【思考】
A、支点(O)
B、动力(F1)
C、阻力(F2)
D、动力臂(l1)
E、阻力臂(l2)
【五要素】
1、支点的位置能不能落在杠杆的两端?
2、如何确定杠杆上的动力和阻力?
3、力臂的大小( l )与支点到力的作用点的那段距离( L )之间有什么关系?
( l ≤ L )
(顺逆原则)
l1
l2
O
F1
F2
作用在杠杆的力使其转动的
效果跟哪些因素有关?
支点O
动力臂l1
阻力臂l2
动力F1
阻力F2
∟
∟
力臂的作法
找出支点的位置
从支点作动力、阻力作用线的垂线
确定动力、阻力作用线
标垂足,定力臂
F1
F2
l1
l2
F1
F2
l1
O
l2
O
调整人与支点之间距离 人的自重
【稳定条件】
通过翘板稳定杠杆处于平衡状态满足什么条件?
力的大小 力臂
体重不同的两人能不能让跷跷板稳定下来?
【思考】
【猜想】
11.2探究杠杆的平衡条件:
如图杠杆是不是平衡状态?
11.2探究杠杆的平衡条件
杠杆平衡:杠杆在动力和阻力作用下静止时,我们就说杠杆平衡。
设计实验:当杠杆平衡时,分别测出动力F1、阻力F2,动力臂l1、阻力臂l2。并多次改变力和力臂,获取多组数据,从而分析总结出杠杆的平衡条件。
实验器材:
带等分刻度的均质木尺、钩码、铁架台、弹簧测力计。
11.2探究杠杆的平衡条件
实验步骤:
(1)调节平衡螺母,使杠杆水平平衡.
调平衡螺母方法:左高左调
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡.将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中.
目的:使杠杆的重力作用线通过杠杆支点,避免杠杆自身重力
对杠杆平衡的影响。
保证力臂沿杠杆,便于测量力臂。
(3)改变阻力和阻力臂的大小,相应调节动力和动力
臂的大小,再做几次实验.
目的:使实验结论具有普遍性。
(4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡.将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中.
实验步骤:
第三次实验测量弹簧测力计为竖直方向示数为多少,如向左或者右倾斜示数会出现什么变化?得出最小动力的画法?
步骤4为什么与前两次实不同?
实验次数
动力F1/N
动力臂l1/cm
阻力F2/N
阻力臂l2/cm
1
0.5
20
1
10
2
1
20
4
5
3
0.6
20
1
10
F1?L1
F2?L2
合作探究:
合作完成探究杠杆的平衡条件的实验,将实验数据计入表格,分析论证,得出结论准备展示
杠杆平衡时,动力×动力臂=阻力×阻力臂。
动力×动力臂=阻力×阻力臂
F1 L1 = F2 L2
F2
F1
L1
L2
杠杆的平衡条件:
实验反思
1. 为什么要调节杠杆在水平位置平衡?
2. 为什么要进行多次实验探究?
(消除杠杆自重的影响)
(便于测量相应的力臂)
(避免巧合得到普遍规律)
杠杆的平衡条件:
【内容】
【公式】
【拓展】
【思考】
杠杆平衡原理:
动力乘以动力臂等于阻力乘以阻力臂
F1l1=F2l2
杠杆受多个动(阻)力的平衡条件是什么呢?
给我一个支点和一根足够长的硬
棒,我就能撬动地球。
——阿基米德
F1l1+ Fnln =F2l2 + Fmlm
?F1l1=?F2l2
阿基米德撬地球的杠杆应该有什么特点呢?
实验反思
例题 据《杭州日报》报道,2001年6月22日,在杭州动物园内,一位物理老师利用杠杆原理,仅用小小的弹簧测力计就测出了一头大象的质量。测量时利用了根长度为12m的槽钢作为杠杆。吊钩固定于槽钢的中点O。当槽钢水平静止时,弹簧测力计示数F1为200N。测得l1为6m,l2为4cm。若不计铁笼的质量,请估算大象的质量。g取10N/kg。
O
l1=6m
l2=4cm
F1=200N
F2
例题:
由F1l1=F2l2 得:
解:
F2
=
F1 l1
l2
=
200N×6m
0.04m
=3×104N
m
=
F2
g
=
10N/kg
3×104N
=3×103kg=3t
=
G
g
O
F1
F2
l1
l2
你认为图中的杠杆 在使用时效果相同吗?
F1
F2
l1
l2
O
O
F1
F2
l1
l2
O
l2
l1
F1
F2
生活中的杠杆
观察与思考
1
省力杠杆
省力杠杆有哪些特点?
杠杆的分类:
【省力杠杆】
【特点】
动力臂大于阻力臂
动力小于阻力,省力
费距离
【实例】
起子
羊角锤
压水井手柄等
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
O
F2
F1
A
B
F2
F1
A’
B’
可见,省力杠杆虽然省力,但费了距离。
所以省力杠杆又可称为____杠杆
省力杠杆的特点
若克服的阻力较大时,要用省力杠杆。
省力杠杆
2
费力杠杆
【费力杠杆】
【特点】
动力臂小于阻力臂
动力大于阻力,费力
省距离
【实例】
船桨等
笤帚
筷子
费力杠杆有哪些特点?
镊子
F2
F1
h
S=4h
A’
B’
A
B
F2
F1
O
h
S=4h
h
S=4h
h
S=4h
h
S=4h
h
S=4h
可见,费力杠杆虽然费了力,但可以省距离。
所以费力杠杆右可称为____杠杆。
费力杠杆的特点
若克服的阻力较小时,要用费力杠杆。
使用费力杠杆,可以省距离。
能使工作快捷。
费力杠杆
3
等臂杠杆
天平如果不等臂怎么修正?
【等臂杠杆】
【特点】
动力臂等于阻力臂
动力等于阻力,
不费力不省距离
【实例】
天平等
(等量替代)
杠杆的种类:省力杠杆、费力杠杆、等臂杠杆。
应 用
杠杆缺点
杠杆优点
杠杆特点
杠杆类型
等臂杠杆
费力杠杆
省力杠杆
L1>L2,F1
L1
(动力>阻力)
L1=L2,F1=F2
(动力=阻力)
省力
省距离
既不省力也不省距离
费距离
费 力
等臂杠杆
费力杠杆
请对下列器具应用的杠杆进行分类:
费力杠杆
省力杠杆
费力杠杆
省力杠杆
费力杠杆
费力杠杆
【平衡要素的计算】
例、扁担长2m,两端物体的质量
分别为50kg和30kg。若不考虑扁
担的重力。人的肩头应在什么位
置,扁担才平衡?
【解】
F1l1=F2l2
m1gAO=m2g(AB-AO)
50kgAO=30kg(2m-AO)
解之得:AO=0.75m
肩头离A端0.75m处,扁担可保持平衡。
【答】
【动态平衡的分析1】
例、如图所示,一个轻质杠杆可绕轴O转动,在直杆的中点挂一重物,在杆的另一端施加一个动力F,将直杆从右下位置慢慢抬起到水平位置过程中,
力F大小的变化情况是 ( )
A.一直增大 B.一直减小
C.保持不变 D.无法确定
【最小动力的确定1】
【方法】
1、合理确定支点O和动力作用点
3、作动力作用线,判断阻力作用效果
2、连线支点和动力作用点为最大动力臂
4、根据“顺逆原则”确定动力方向
【最小动力的确定2】
可见,杠杆这一简单机械依然具有重要的价值
生活 物理 社会
人体中的杠杆
(2021宁夏)如图是同学们常用的燕尾夹,AB=BC,当用力摁住C点打开该夹子时,可把______点看作支点,此时夹子可近似看作________杠杆(选填“省力”“费力”或“等臂”).
(2021甘孜州)如图9所示,某同学用完全相同的钩码验证杠杆的平衡条件。杠杆调节平衡后,在杠杆上A点处挂4个钩码,为使杠杆重新平衡,应在B点处挂__▲ 个钩码; 如果A、B两处再各挂一个钩码, 杠杆的__▲ (选填 “左”或“右”)端会下沉。
(2020雅安)如图所示,杆秤秤砣的质量为0.2kg,杆秤自身质量忽略不计,若杆秤水平静止时,被测物体和秤砣到秤纽的距离分别为0.05m和0.2m,则被测物体的质量为__kg,若秤砣上粘有油污,则测量值比被测物体的真实质量要____(选填 “偏大”或“偏小”)
(2020南京)如图是过去农村用的舂米工具的结构示意图。O为固定转轴,A处连接着石球,脚踏杆的B处可使石球升高,抬起脚,石球会落下去击打稻谷。石球重50N,不计摩擦和杆重。
(1)脚沿与杆垂直方向至少用力F1才能将石球抬起。F1的力臂为______m,此时舂米工具是一个______(选填“省力”或“费力”)杠杆;
(2)脚竖直向下至少用力F2为______N,才能将石球抬起,F2和F1的大小关系为F2______F1。
(2021安徽)停车场入口处常用横杆来控制车辆的进出 ,如图甲所示。我们可以把该装置简化成如图乙所示的杠杆。若横杆AB粗细相同、质量分布均匀,重G=120N,AB=2.8m ,AO=0.3。要使横杆AB保持水平平衡,需在A端施加竖直向下的力F=________N。
同课章节目录
- 第十一章 简单机械和功
- 1 杠杆
- 2 滑轮
- 3 功
- 4 功率
- 5 机械效率
- 第十二章 机械能和内能
- 1 动能 势能 机械能
- 2 内能 热传递
- 3 物质的比热容
- 4 机械能和内能的相互转化
- 第十三章 电路初探
- 1 初识家用电器和电路
- 2 电路连接的基本方式
- 3 电流和电流表的使用
- 4 电压和电压表的使用
- 第十四章 欧姆定律
- 1 电阻
- 2 变阻器
- 3 欧姆定律
- 4 欧姆定律的应用
- 第十五章 电功和电热
- 电能表与电功
- 电功率
- 电热器 电流的热效应
- 家庭电路与安全用电
- 第十六章 电磁转换
- 磁体与磁场
- 电流的磁场
- 磁场对电流的作用 电动机
- 安装直流电动机模型
- 电磁感应 发电机
- 第十七章 电磁波与现代通信
- 信息与信息传播
- 电磁波及其传播
- 现代通信 走进信息时代
- 第十八章 能源与可持续发展
- 能源利用与社会发展
- 核能
- 太阳能
- 能量转化的基本规律
- 能源与可持续发展